1.本发明属于电力技术领域,涉及一种荷源互动调峰控制方法。
背景技术:
2.近年来,随着传统发电资源(主要是煤炭)的枯竭和环境污染等问题的加重,传统电网可持续发展遭遇莫大挑战,节能环保型发电日益受到提倡。当前,世界各国陆续出台法案增加可再生能源的发电比例,优化发电能源结构,智能电网在全球范围内掀起了新一轮研究和应用的热潮。国家电网公司在2009年的“特高压输电技术国际会议”上提出了“坚强智能电网”的发展规划。虽然大规模风电并网增加了电力的供应,有效缓解阶段性电力供需矛盾,减少了环境污染但由于风能、太阳能等新能源固有的随机性、间歇性和波动性等特点,新能源大规模开发面临接入、调度及消纳困难,电网调峰压力不断加大等诸多问题。电力负荷的需求响应(demand response,dr)作为解决问题的关键技术,可实现大规模的新能源消纳,促进电网的资产利用高效化与发电能源清洁化。
3.大规模新能源的接入导致了电网调峰资源的紧张,提高了电网的调峰成本,此亟需寻找除常规电源以外的调峰资源。国外现在己经有不少较为成功的需求侧负荷响应项目,用户参与的积极性也越来越高。我国已经具有容量可观的高载能负荷,电动汽车负荷与蓄热电锅炉负荷发展也很迅速。但在现有的对于多形态需求侧负荷响应参与荷源互动调峰控制方法的研究中,都只单一地考虑一种需求侧负荷,未考虑多种需求侧负荷同时参与调峰。同时,对于建立适应大规模风电并网的多形态需求侧负荷响应参与荷源互动调峰模式和模型尚缺乏系统性研究。
技术实现要素:
4.本发明的目的是提供一种基于需求侧负荷响应参与荷源互动调峰控制方法,设计了考虑日前日内两种时间尺度的荷源互动调峰模式。提出了考虑可离散响应负荷、可连续响应负荷、可时移响应负荷、可中断响应负荷以适用于现阶段的国内需求的调峰模式,对提高电网的调峰能力,削减电网成本,降低弃风电量具有重要的作用。
5.本发明所采用的技术方案是,一种需求侧负荷响应参与荷源互动调峰控制方法,包括日前荷源互动调峰优化模型、日内荷源互动滚动修正调峰优化模型及其求解方法。
6.所述的日前荷源互动调峰优化模型,是指基于风电日前功率预测,建立以系统运行成本最小为目标函数,以系统功率平衡、常规机组、可离散响应负荷、可时移响应负荷、可中断响应负荷等为约束条件的日前荷源互动调峰优化模型。
7.所述的日内荷源互动调峰优化模型,是指基于风电日内功率预测,建立以风电日内预测值与日前风电出力计划值偏差最小为目标函数,以系统功率平衡、常规机组、可连续响应负荷等为约束条件的日内荷源互动滚动修正调峰优化模型。
8.所述的需求侧负荷响应参与荷源互动调峰模式控制策略是指利用这些负荷调节特性优异、形态各异、容量可观的特点,在大范围的需求侧负荷响应项目的实施下,面对大
规模新能源的接入导致了电网调峰资源的紧张的问题,采用多种需求侧负荷同时参与调峰,建立了荷源互动的调峰模型,并基于遗传算法对该模型进行了求解,从而实现了电网的合理调峰,提高了系统调峰能力、降低了系统运行成本。
9.所述的模型求解方法,是指采用遗传算法对所建立的模型进行求解。在求解过程中,对不满足约束条件的个体进行修正,使其尽量满足约束条件,对于部分难以修正的约束,采用罚函数方法转化为无约束优化问题,可以在一定程度上减少传统遗传算法在求解具有复杂约束问题时存在可行解获取困难、易于陷入局部最优解等问题。
10.本发明的有益效果是,建立合理的多形态需求侧负荷响应参与荷源互动调峰模式,有利于实现电力公司损失最小,增强电网的风电消纳能力,削减电网成本。
附图说明
11.图1是遗传算法流程图,
12.图2是基于需求侧负荷响应的荷源互动调峰模型流程图;
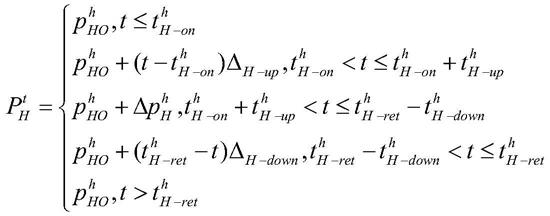
13.图3是典型可离散响应负荷特性曲线;
14.图4是典型的可时移响应负荷特性曲线;
15.图5是日前荷源互动调峰模式图;
16.图6是日内荷源互动调峰模式图;
具体实施方式
17.一、基于需求侧负荷响应的荷源互动调峰模型
18.根据多形态需求侧负荷调节特性,将多形态需求侧负荷按照调节特性归纳为可离散响应负荷、可时移响应负荷、可连续响应负荷、可中断响应负荷。现将这几种负荷的调节特性及响应模型做以简单介绍。
19.(1)可离散响应负荷
20.典型可离散响应负荷特性曲线如图3所示。
21.其中,对于可离散响应负荷l,其在时段h的负荷初始容量为可增加的响应容量为负荷开始响应时间为负荷返回时间为负荷向上向下爬坡率分别为δ
h
‑
up
、δ
h
‑
down
。
22.那么,可得可离散负荷l的向上、向下爬坡时间为:
[0023][0024]
可离散负荷l在h时段内的负荷值可表示为:
[0025][0026]
可离散响应负荷的响应电量可表示为:
[0027][0028]
式中,w
h
为可离散响应负荷l在调度周期内的总响应电量,m为调度周期内的总时段数,δt为吋段h的时间间隔。
[0029]
定义可离散响应负荷的投切状态为:若可离散响应负荷l在吋段h;投入运行,若可离散响应负荷l在时段h离散运行,
[0030]
(2)可时移响应负荷
[0031]
可时移响应负荷是在不影响整体生产流程的前提下,通过调整生产时间,将其用用电时移至风电大发时段,以消纳受阻风电。典型的可时移响应负荷特性曲线如下图4所示。
[0032]
定义了可时移响负荷n的吋移时段:
[0033]
δh
sn
=|h
sn
‑
h
sn0
|
[0034]
式中h
sn
为可时移响应负荷n的响成启动时段,h
sn0
为可时移响应负荷n的原始启动时段。
[0035]
对于可时移响应负荷n,其在时段h内的负荷值可表示为:
[0036][0037]
式中,为可时移响应负荷n时移前在时段h内的负荷值;h
sn
为可时移响应负荷n的持续工作时段数。
[0038]
可时移响应负荷n的响应电量可表示为:
[0039][0040]
式中,w
sn
为可时移响应负荷n在调度周期内的总响应电量。
[0041]
定义可时移响应负荷n的启动状态为:若可时移响应负荷n在时段h启动,若在其他时段启动,
[0042]
(3)可连续响应负荷
[0043]
可连续响应负荷调节特性好,能够连续响应,响应速度快,不受稳定生产时长的影响,但其响应范围较小。
[0044]
对于可连续响应负荷m,其在时段h的负荷值可表示为:
[0045][0046]
式中,p
cm.max
为可连续响应负荷m的最大可调节容量;为可连续响应负荷m在时段调节比例,取值范围为[0,1]。
[0047]
可连续响应负荷m的响应电量可表示为:
[0048][0049]
式中,w
cm
为可连续响应负荷m在调度周期内的总响应电量,为时段h内的可连续响应负荷m的增加功率。
[0050]
定义可连续响应负荷的投切状态为:若可连续响应负荷m在时段h投入运行,若可连续响应负荷m在时段h退出运行,
[0051]
(4)可中断响应负荷
[0052]
可中断负荷是指在电网高峰时段或紧急状况下,用户负荷中心可以中断的部分。可中断负荷通常通过经济合同(协议)实现。它由电力公司与用户签订,在系统峰值时和紧急状态下,用户按照合同规定中断和削减负荷,电力公司给予用户一定的经济补偿。
[0053]
可中断响应负荷k的响应电量可表示为:
[0054]
w
lk
=p
lk
δt
[0055]
式中,w
lk
为可连续响应负荷k在调度周期内的总响应电量,p
lk
为签订协议允许中断容量,持续时间为δt。
[0056]
1、日前荷源互动调峰模式
[0057]
日前时间尺度源荷互动调峰层:参与调节的电源和多形态需求侧负荷分别为常规电源机组、可离散负荷、可时移负荷、可中断负荷。日前时间尺度为24小时,分为96个时刻,每1个时间间隔为15min。对荷源进行日前互动调峰控制,从而得到常规电源机组日前出力计划和可离散负荷、可时移负荷、可中断负荷用电调节计划。日前荷源互动调峰模式如图5所示。
[0058]
在日前时间尺度下,以多形态需求侧负荷系统运行成本最小为目标,建立日前荷源互动调峰优化模型。
[0059]
(1)目标函数
[0060]
minc1=c
gen
c
ls
c
sy
c
zd
[0061][0062][0063]
[0064][0065]
式中,c1为日前荷源互动调峰模型阶段系统运行成本,c
gen
为常规电源调度成本,由机组运行成本和启停成本组成;c
ls
、c
sy
,c
zd
,分别为可离散响应负荷、可时移响应负荷、可中断响应负荷的调度成本。为常规机组i在t时段的启停状态变量,当时表示常规机组i在t时段处于停机状态,当时表示常规机组i在t时段处于开机状态;n
g
为常规发电机组的台数,为常规机组i在t时段的出力,α
i
、β
i
、γ
i
分别为常规机组i的运行成本参数,s
gi
为常规电源机组i的启停成本;ω
lsj
、ρ
lsj
、τ
lsj
分别为可离散响应负荷、可时移响应负荷、可中断响应负荷的单位调节成本,分别为可离散响应负荷、可时移响应负荷、可中断响应负荷在j时段的调度状态,其值为1表示负荷j在t时段参与调度,为0表示负荷j在t时段未参与调度,n
ls
、n
sy
、n
zd
分别为可离散响应负荷、可时移响应负荷的数目、可中断响应负荷的数目。
[0066]
(2)约束条件
[0067]
约束条件包括系统功率平衡约束、常规机组出力约束、风电出力约束、可离散响应负荷约束等。
[0068]
1)系统功率平衡约束
[0069][0070]
2)旋转备用
[0071][0072][0073]
式中,和分别为常规机组i在t时段的最小可用出力和最大可用出力;和分别为t时段应对负荷预测误差所需的正负旋转备用;和分别为t时段应对风电功率波动所需的正负旋转备用。
[0074]
3)风电出力约束
[0075][0076]
式中:分别为t时段风电有功预测出力。
[0077]
4)常规机组输出功率上下限约束
[0078][0079]
式中:p
gi.max
、p
gi.min
分别为第i台常规电源机组出力上下限。
[0080]
5)常规机组最小启停时间约束
[0081][0082]
式中:和分别为第i台常规电源机组在时段的停机持续时间和开机持续时间,和分别为第i台常规电源机组在t时段的最小停机时间和最小运行时间。
[0083]
(6)常规机组爬坡约束
[0084][0085]
式中:p
gi,down
和p
gi.up
分别为第i台常规电源机组减出力限制和增出力限制。
[0086]
(7)可离散响应负约束
[0087]
①
可离散响应负荷容量约束
[0088][0089]
式中,p
lsj.min
和p
lsj.max
分别为可离散响应负荷j的离散容量上下限。
[0090]
②
可离散响应负荷调节次数约束
[0091][0092]
式中,n
lsj
为可离散响应负荷j允许的最大投切次数。
[0093]
③
可离散响应负荷稳定运行时长约束
[0094]
t
lsj.min
≤t
lsj
≤t
lsj.max
[0095]
式中,t
lsj
为可离散响应负荷j某次调节的稳定运行时长,t
lsj.max
、t
lsj.min
分别为可离散响应负荷j稳定运行时长的上下限。
[0096]
(8)可时移响应负荷约束
[0097]
①
可时移响应负荷容量约束
[0098][0099]
式中,p
syj.max
和p
syj.min
分别为可时移响应负荷j时移容量上下限。
[0100]
②
可时移响应负荷时移量约束
[0101]
在整个调度周期t内,可时移响应负荷j时移前后负荷总量保持不变。
[0102][0103]
式中,w
syj0
为可时移响应负荷j时移前负荷总量。
[0104]
(9)可中断响应负荷约束
[0105]
①
可中断响应负荷容量约束
[0106][0107]
式中,p
zdj.max
和p
zdj.min
分别为可中断响应负荷j可中断容量上下限。
[0108]
②
可中断响应负荷稳定运行时长约束
[0109]
t
zdj.min
≤t
zdj
≤t
zdj.max
[0110]
式中,t
zdj
为可离散响应负荷j某次调节的稳定运行时长,t
zdj.max
、t
zdj.min
分别为可离散响应负荷j稳定运行时长的上下限。
[0111]
2、日内荷源互动调峰模式
[0112]
日内时间尺度源荷互动调峰层:参与调节的电源和多形态需求侧负荷分别为常规电源机组、可连续响应负荷。日内时间尺度为4小时,分为16个时刻,每1个时间间隔为15min。在日前荷源互动调峰控制计划的基础上,根据日内风电预测和可连续响应负荷的调节能力,对日内调峰控制计划进行滚动修正,进一步地提高系统的调峰能力。日内荷源互动调峰模式如图6所示。
[0113]
在日内时间尺度下,每15min启动一次滚动优化控制,安排未来4h可连续响应负荷用电计划和常规电源的出力修正计划。以风电日内预测值与日前风电出力值偏差最小为目标,建立日内荷源互动调峰优化模型。
[0114]
(1)目标函数
[0115][0116]
式中:为风电日内预测值与日前风电计划出力值偏差,为风电日内预测值,s
lxj
为可连续响应负荷j的在t时段的调度状态,其值为1表示负荷j在t时段参与调度,为0表示负荷j在t时段未参与调度,
nlx
为可连续响应负荷的数目,p
lx
′
j
为可连续响应负荷j在t时段调节量。
[0117]
(2)约束条件
[0118]
约束条件包栝系统功率平衡约束、常规机组出力约束、风电出力约束、可连续响应负荷约束。
[0119]
1)系统功率平衡约束
[0120][0121]
式中:为风电日内出力值,为常规机组j在t时段有功出力修正量。
[0122]
2)风电出力约束条件
[0123][0124]
3)常规机组输出功率上下限约束
[0125][0126]
4)可连续响应负荷约束
[0127]
①
可连续响应负荷响应容量约束
[0128][0129]
式中,p
lxj.max
和p
lxj.min
分别为可连续响应负荷j的可响应容量上下限。
[0130]
②
可连续响应负荷响应容量升降约束
[0131]
[0132]
式中,δp
lxj.down
、δp
lxj.up
分别为可连续响应负荷j的单时段负荷升调节限值、下降调节限值。
[0133]
二、基于遗传算法的模型求解
[0134]
遗传算法是一种基于达尔文的生物进化学说所发展成的一种随机搜索算法,该算法是迄今为止被广泛运用的单目标算法之一。在该算法中,将一个生物个体视为搜索空间中的一个可行解,种群则由许多个体组成,是搜索空间中的一个子集,而适应度函数可以认为是目标函数。每代中适应度最高的个体即为当代优良个体。之后,对种群进行交叉变异等操作,对适应度低的个体进行淘汰,将适应度高的个体保留下来,并将其基因传递到下一代个体中。再经过多次迭代,当达到终止条件时停止该算法,其输出即为最优个体。
[0135]
遗传算法大致上是由初始化种群、构造适应度函数、选择、交叉、变异等组成。现将利用遗传算法解决优化问题的基本步骤介绍如下。
[0136]
(1)初始化种群:初始化的种群为(x1,x2,
…
,x
i
,
…
x
n
),其中n为种群规模,x
i
为第i个种群个体,为搜索域一个可行解。种群屮每个个体代表着一组优化变量,其中包含常规机组启停状态及有功出力、风电调度出力、可连续响应负荷、可时移响应负荷、可离散响应负荷、可中断响应负荷的投切状态及响应容量。
[0137]
(2)初始化参数:对该算法中所需的基本参数根据经验并结合实际设置初始值。如种群规模n0、迭代次数e、交叉概率p
c
、变异概率p
m
等。
[0138]
(3)选择。根据所选择的适应度函数对各个个体的适应度值进行计算,然后利用采用轮盘赌得到优良个体。
[0139]
(4)交叉。选择任意两个个体进行单点交叉操作得到新的个体。
[0140]
(5)变异。采用随机的方式在种群中选出一个个体,采用均匀变异进行变异操作,获得新个体。
[0141]
(6)对算法所设置的终止条件做以判断,若符合设置的终止条件则输出最优个体,,若不满足则返回步骤(3)。
[0142]
但遗传算法应用于此类有约束的优化问题时,一般采取两种方式处理各种约束条件:一种是在初始化和更新种群时只保留满足约束条件的个体,但该方法在解决约束繁多的问题时难以获取有效的可行解,往往因为获取的可行解较少而导致早熟;另一种是采用罚函数将约束问题转化为无约束问题,但是过多的罚函数会使得惩罚因子的选取和组合变得极为困难。针对以上难题,本发明提出的遗传算法采用一种复杂约束动态修补策略,该策略的主要思想为:在获取初始解和每次迭代更新时,对不满足约束条件的个体进行修正,使其尽量满足约束条件,对于部分难以修正的约束,采用罚函数方法转化为无约束优化问题。具体的修补原则如下:
[0143]
①
调整常规机组出力使其满足机组出力上下限约束
[0144][0145]
②
当t时刻违反功率平衡约束时,计算功率偏差值
[0146]
[0147]
若δp
t
>0,标记t时刻出力值达到下限的机组序号(假设为k号,按照下式将功率偏差值分配到各个机组);若δp
t
<0,标记t时刻出力值达到上限的机组序号(假设为n,按照下式将分配功率偏差值)。
[0148][0149][0150]
在分配完成后如若违反出力上下限,按照原则
①
调整机组出力。反复调整机组出力,直至δp
t
=0或r=r
set
(r为截至当前的调整次数r
set
为设定的最大调整次数),则停止迭代。
[0151]
如果达到设定的调整次数,仍然不能满足功率平衡约朿,说明本次迭代得到的解并非可行解(但己经尽量靠近了可行解区域)。同样,系统正、负调峰裕度约束也难以同时满足,因此,本章在适应度函数中加入功率平衡约束和调峰裕度约束的罚函数,保证在下次迭代时各个体能尽可能吸引到可行解的区域中。相应的适应度函数为:
[0152][0153]
式中:λ
pb
,λ
mn
,λ
md
分别为功率平衡约束、正调峰裕度和负调峰裕度约束的惩罚因子。
[0154]
若迭代至最后一代时,功率平衡约束或系统调峰裕度约束仍不满足,则搜索调峰容量不足的时段并采取弃风措施,以保障电网安全运行。
[0155]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的内容和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。