1.本发明涉及秧苗移栽机控制技术领域,具体涉及秧苗移栽机注液控制方法及其控制系统。
背景技术:
2.秧苗移栽机工作时,发动机动力通过变速箱传递到主轴,主轴通过链传动带动驱动轮运动、机组行走。驾驶人员可根据移栽需要,调节变速箱档位,以达到不同的行驶速度。移栽部件由主轴链轮机构带动,使双曲柄连杆机构旋转,从而带动移栽鸭嘴动作,完成往复圆周运动,这种运动与机器的前进运动相匹配,保证移栽鸭嘴垂直起落,实现秧苗垂直栽植。移栽鸭嘴的开闭由拉线控制,在非移栽行驶区,操作人员可调节离合器,不进行移栽作业。株距调节通过更换不同齿数的栽植传动机构调节链轮,实现株距可调。秧苗投放采用横向投苗装置,让操作人员有足够的时间投放秧苗,有效地减少移栽漏苗率。
3.在新疆、甘肃等西北干旱地区,瓜菜等秧苗在移栽后还需要进行注水操作,有时还需在注水的同时添加不同的农药和液态肥,由于土壤墒情不同,不同品种的秧苗所需水药肥量也不同,现阶段主要通过人工凭经验完成。此外,市面已有的部分秧苗移栽机在现有基础上尝试增加注水机构,但现有的注水机构功能局限于实现定点定量施水,适用性较差,无法精确控制注水注肥量,在提高秧苗成活率的功效上存在不足。
技术实现要素:
4.发明目的:本发明目的在于针对现有技术的不足,提供一种秧苗移栽机注液控制方法及其控制系统,能够根据土壤湿度、土壤养分进行注液操作,并通过pid控制算法进行反馈调控,提高注液效率。
5.技术方案:本发明所述秧苗移栽机注液控制方法,包括如下步骤:
6.(1)采集鸭嘴前一穴的土壤湿度、土壤养分;
7.(2)根据目标土壤湿度、采集到的土壤湿度,计算注水机构流向鸭嘴的理论注水量并生成对应该理论注水量的注水信号,根据目标土壤养分、采集到的土壤养分,计算注肥机构流向鸭嘴的理论注肥量并生成对应该理论注肥量的注肥信号;
8.(3)采集鸭嘴移动至最低点时的位置信号,触发控制器的外部开启信号,控制器输出注水信号、注肥信号分别至注水比例阀、注肥比例阀,注水比例阀根据注水信号确定阀体开度和时间进行注水操作,注肥比例阀根据注肥信号确定阀体开度和时间进行注肥操作,注水流量计采集当前时间段注水机构流向鸭嘴的实际注水量,注肥流量计采集当前时间段注肥机构流向鸭嘴的实际注肥量;
9.(4)控制器将实际注水量与理论注水量之间的差值以及实际注肥量与理论注肥量之间的差值输入pid算法控制器,pid算法控制器的输出作为下一次操作的注水信号、注肥信号;
10.(5)重复上述步骤,用步骤(4)中的注水信号、注肥信号代替步骤(2)中的注水信
号、注肥信号,完成所有注水。
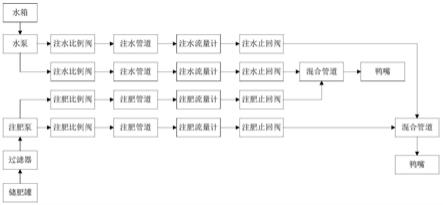
11.进一步完善上述技术方案,所述注水机构包括水箱、水泵、注水管道,水箱内存储的水被水泵抽取后经所述注水比例阀进入注水管道入口,注水管道出口经所述注水流量计与混合管道第一入口连通,混合管道出口与所述鸭嘴连通;所述注肥机构包括储肥罐、过滤器、注肥泵、注肥管道,储肥罐内的肥液经过滤器被注肥泵抽取,再经所述注肥比例阀进入注肥管道入口,注肥管道出口经所述注肥流量计与所述混合管道的第二入口连通,混合管道出口与所述鸭嘴连通。
12.进一步地,所述鸭嘴为两个,所述注水机构的水泵出水口经两个注水比例阀连接有两路注水管道,两路注水管道经两个注水流量计与两路混合管道的第一入口分别相连,所述注肥机构的过滤器经两个注肥比例阀连接有两路注肥管道,两路注肥管道经两个注肥流量计与两个所述混合管道的第二入口分别相连,两个混合管道的出口与两个鸭嘴分别相连。
13.进一步地,所述混合管道的第一入口设有注水止回阀,所述混合管道的第二入口设有注肥止回阀。
14.进一步地,所述鸭嘴包括两个呈锥形的鸭嘴开合片,其中一鸭嘴开合片为中空结构,中空结构的顶部设有进液口与所述混合管道出口连通,中空结构的底部设有出液口。
15.进一步地,所述土壤湿度、土壤养分分别通过鸭嘴前侧的土壤湿度传感器、土壤养分传感器进行采集,土壤湿度传感器、土壤养分传感器安装在秧苗移栽机上且与鸭嘴保持一个作业株距;所述鸭嘴移动至最低点时的位置信号通过位置传感器采集,位置传感器安装在秧苗移栽机上对应鸭嘴运动最低点设置。
16.进一步地,所述pid算法控制器的计算过程包括:
17.计算当前时间段实际注水量与理论注水量之间的差值e1(k),当前时间段实际注肥量与理论注肥量之间的差值e2(k),计算e1(k)与e2(k)的平均误差将平均误差与预设误差值ε相比:
18.当时,所述pid算法控制器采用模糊控制规则对注水信号、注肥信号的pid参数进行自适应调整;
19.当且所述pid算法控制器采用专家pid控制规则对注水信号的pid参数进行调整、采用模糊控制规则对注肥信号的pid参数进行调整;
20.当且所述pid算法控制器采用模糊控制规则对注水信号的pid参数进行调整、采用专家pid控制规则对注肥信号的pid参数进行调整。
21.用于实现上述方法的秧苗移栽机注液控制系统,包括:土壤湿度传感器、土壤养分传感器,设于秧苗移栽机上且与鸭嘴保持一个作业株距,所述土壤湿度传感器、土壤养分传感器分别用于采集鸭嘴前一穴的土壤湿度、土壤养分;水箱、水泵,水箱与水泵相连,水泵出水口分为两路且每路均连接有注水比例阀、注水管道、注水流量计,两路注水流量计与两个混合管道的第一入口连通;储肥罐、过滤器、注肥泵,储肥罐连接有过滤器、过滤器出水口经注肥泵分为两路且每路均连接有注肥比例阀、注肥管道、注肥流量计,两路注肥流量计与两个混合管道的第二入口连通;两个鸭嘴,并列设置在秧苗移栽机两侧且跟随秧苗移栽机的主轴链轮做往复圆周运动并在到达最低点时张开,鸭嘴包括两个呈锥形的鸭嘴开合片,其
中一鸭嘴开合片为中空结构,中空结构的顶部设有进液口、底部设有出液口,两个鸭嘴的进液口与两个混合管道的出口分别连通;两个位置传感器,设置在秧苗移栽机上与两个鸭嘴运动最低点相对应;控制器,与土壤湿度传感器、土壤养分传感器、注水比例阀、注肥比例阀、注水流量计、注肥流量计、位置传感器均相连,用于获取土壤湿度传感器、土壤养分传感器采集的鸭嘴前一穴的土壤湿度、土壤养分,计算注水机构流向鸭嘴的理论注水量并生成对应该理论注水量的注水信号,计算注肥机构流向鸭嘴的理论注肥量并生成对应该理论注肥量的注肥信号,接收位置传感器采集的鸭嘴到位信号并触发对注水比例阀、注肥比例阀的控制,获取注水流量计、注肥流量计采集的实际注水量、实际注肥量并通过pid算法控制器对注水信号、注肥信号进行调整。
22.进一步地,所述pid算法控制器的计算过程包括:计算当前时间段实际注水量与理论注水量之间的差值e1(k),当前时间段实际注肥量与理论注肥量之间的差值e2(k),计算e1(k)与e2(k)的平均误差将平均误差与预设误差值ε相比:
23.当时,所述pid算法控制器采用模糊控制规则对注水信号、注肥信号的pid参数进行自适应调整;
24.当且所述pid算法控制器采用专家pid控制规则对注水信号的pid参数进行调整、采用模糊控制规则对注肥信号的pid参数进行调整;
25.当且所述pid算法控制器采用模糊控制规则对注水信号的pid参数进行调整、采用专家pid控制规则对注肥信号的pid参数进行调整。
26.有益效果:与现有技术相比,本发明的优点在于:本发明通过设置土壤湿度传感器、土壤养分传感器采集土壤湿度和土壤养分,采用位置传感器准确获取移栽鸭嘴动作时间,控制器生成注水比例阀、注肥比例阀的驱动信号,实现注水比例阀、注肥比例阀的启动、开度和时间调节,从而实现了对注液过程进行精准控制,大大提高了水资源、肥料利用率且注液量更加精准,保证了秧苗存活率;将土壤湿度传感器、土壤养分传感器设置在鸭嘴前方且保持同步运动,精准测量下一穴移栽位置的土壤墒情,保证了每颗秧苗的注液精确度;通过流量计获取实际注液量,便于与目标注液量比较,采用pid算法对注水、注肥进行精准控制,针对存在注水、注肥两组调控,先判断整体误差,然后分别判断注水、注肥误差量,采用专家pid控制、模糊pid控制两种模式,具有很好的实时性和快速性,速度超调很小,而稳态精度很高,保证注水、注肥过程控制精度大大提高;注液管通过中空结构的鸭嘴开合片,直接将液体输送至秧苗根部,避免堵塞的同时防止高压液体直接冲到秧苗和根部,对秧苗造成损害。
附图说明
27.图1是注水过程、注肥过程的控制示意图;
28.图2是鸭嘴的结构示意图;
29.图3是鸭嘴与混合通道连接处的剖面图。
30.图4是本发明控制器的原理框图;
31.图5是本发明控制流程图;
32.图6是本发明pid控制原理图。
具体实施方式
33.下面通过附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
34.如图1所示的秧苗移栽机注液控制系统,包括:水箱、水泵、储肥罐、过滤器、注肥泵,两个鸭嘴。水箱与水泵相连,水泵出水口分为两路且每路均连接有注水比例阀、注水管道、注水流量计,两路注水流量计与两个混合管道的第一入口连通;储肥罐连接有过滤器、过滤器出口经注肥泵分为两路且每路均连接有注肥比例阀、注肥管道、注肥流量计,两路注肥流量计与两个混合管道的第二入口连通,两个混合管道的出口与鸭嘴连通。
35.两个鸭嘴并列设置在秧苗移栽机两侧且跟随秧苗移栽机的主轴链轮做往复圆周运动并在到达最低点时张开。如图2、图3所示,鸭嘴包括两个呈锥形的鸭嘴开合片1,其中一鸭嘴开合片为中空结构5,中空结构5的顶部设有进液口2、底部设有出液口4,两个鸭嘴的进液口2与两个混合管道的出口分别连通。
36.秧苗移栽机上还设有两组土壤湿度传感器、土壤养分传感器以及两个位置传感器,土壤湿度传感器、土壤养分传感器与鸭嘴保持一个作业株距,分别用于采集鸭嘴前一穴的土壤湿度、土壤养分;两个位置传感器在秧苗移栽机上与两个鸭嘴运动最低点相对应。
37.如图3所示,以一个鸭嘴的注水、注肥控制为例,控制器与土壤湿度传感器、土壤养分传感器、注水比例阀、注肥比例阀、注水流量计、注肥流量计、位置传感器均相连,用于获取土壤湿度传感器、土壤养分传感器采集的鸭嘴前一穴的土壤湿度、土壤养分,计算注水机构流向鸭嘴的理论注水量并生成对应该理论注水量的注水信号、注肥机构流向鸭嘴的理论注肥量并生成对应该理论注肥量的注肥信号,接收位置传感器采集的鸭嘴到位信号并触发对注水比例阀、注肥比例阀的控制,获取注水流量计、注肥流量计采集的实际注水量、实际注肥量并通过pid算法控制器对注水信号、注肥信号进行调整。
38.秧苗移栽机注液控制系统的注水控制方法,包括如下步骤:
39.(1)主轴链轮带动驱动轮前进,鸭嘴跟随主轴链轮做往复圆周运动,鸭嘴前方的土壤湿度传感器、土壤养分传感器与鸭嘴保持同步运动;
40.(2)土壤湿度传感器、土壤养分传感器用于采集鸭嘴前一穴内土壤湿度、土壤养分并传输至控制器,控制器根据目标土壤湿度、采集到的土壤湿度,计算注水机构流向鸭嘴的理论注水量并生成对应该理论注水量的注水信号,控制器根据目标土壤养分、采集到的土壤养分,计算注肥机构流向鸭嘴的理论注肥量并生成对应该理论注肥量的注肥信号;
41.(3)如图5所示,在前进过程中,鸭嘴移动至前一穴的位置并在到达最低点时张开,此时位置传感器采集到鸭嘴的位置信号并触发控制器的外部中断信号,控制器输出注水信号、注肥信号分别至注水比例阀、注肥比例阀,注水比例阀根据注水信号确定阀体开度和时间进行注水操作,注肥比例阀根据注肥信号确定阀体开度和时间进行注肥操作,注水流量计采集当前时间段注水机构流向鸭嘴的实际注水量,注肥流量计采集当前时间段注肥机构流向鸭嘴的实际注肥量;
42.(4)控制器将实际注水量与理论注水量之间的差值以及实际注肥量与理论注肥量之间的差值输入pid算法控制器,pid算法控制器的输出作为下一次操作的注水信号、注肥信号;
43.(5)重复步骤(2)至(4),并用步骤(4)中的注水信号、注肥信号替换步骤(2)中注水
信号、注肥信号,完成所有注水。
44.如图6所示的pid控制示意图:
[0045][0046][0047]
其中,u1(k)为pid1算法控制器输出的注水控制变量值,u2(k)为pid2算法控制器输出的注肥控制变量值,t为采样周期,k
p1
为注水控制的比例系数,k
d1
为注水控制的微分系数,k
i1
为注水控制的积分系数,k
p2
为注肥控制的比例系数,k
d2
为注肥控制的微分系数,k
i2
为注肥控制的积分系数,y1(k)为实际注水量,r1(k)为目标注水量,y2(k)为实际注肥量,r2(k)为目标注肥量。
[0048]
e1(k)=r1(k)
‑
y1(k),e2(k)=r2(k)
‑
y2(k),e1(k)、e2(k)是当前采样周期的注水误差值、注肥误差值,控制规则的设计原则是:当误差较大时,控制量的变化应尽量使误差迅速减小;当误差较小时,除了要消除误差以外,还要考虑系统的稳定性,防止系统产生不必要的超调,甚至振荡。本技术中存在注水误差值和注肥误差值两个误差,因此在设计时,必须要考虑同时控制两个误差值,且要保证控制效率和稳定性。
[0049]
采用专家pid控制是基于受控对象和控制规律,并以智能化方式实现。
[0050]
e1(k
‑
1)、e1(k
‑
2)是前一个、前两个采样周期的注水误差值,e2(k
‑
1)、e2(k
‑
2)是前一个、前两个采样周期的注肥误差值,δe1(k)=e1(k)
‑
e1(k
‑
1),δe1(k
‑
1)=e1(k
‑
1)
‑
e1(k
‑
2),δe2(k)=e2(k)
‑
e2(k
‑
1),δe2(k
‑
1)=e2(k
‑
1)
‑
e2(k
‑
2)。
[0051]
根据误差及其变化,设计专家pid控制,以注水控制为例,设置两个误差限定值m1、m2,m1>m2:
[0052]
当e1(k)δe1(k)>0且|e1(k)|≥m1,说明误差朝向误差绝对值增大的方向变化且误差较大,此时控制输出采取比例微分控制,且对比例控制系数采用增益放大系数;
[0053]
当e1(k)δe1(k)>0且|e1(k)|<m1,说明误差朝向误差绝对值增大的方向变化但误差绝对值不大,此时控制输出采取比例微分控制,且对比例控制系数采用抑制放大系数;
[0054]
当e1(k)δe1(k)<0、δe1(k)δe1(k
‑
1)>0时,说明误差绝对值朝较小方向发展,此时控制输出保持不变;
[0055]
当e1(k)δe1(k)<0、δe1(k)δe1(k
‑
1)<0且|e1(k)|≥m1,说明误差处于极值且误差绝对值较大,此时控制输出采取比例控制,比例系数采用增益放大系数;
[0056]
当e1(k)δe1(k)<0、δe1(k)δe1(k
‑
1)<0且|e1(k)|<m1,说明误差处于极值且误差绝对值较小,此时控制输出采取比例控制,比例系数采用抑制系数;
[0057]
当|e1(k)|≤m2,说明误差的绝对值很小,此时加入积分,减少稳态误差。
[0058]
模糊自适应pid控制以受控对象特性为基础,实时改变控制策略,保证输出在最佳范围内。模糊自适应pid控制以实际注水量与理论注水量之间的差值e1(k)及其变化率、实际注肥量与理论注肥量之间的差值e2(k)及其变化率作为模糊控制的输入量,找出pid三个参数与差值e1(k)及其变化率之间的模糊关系,比例系数用于加快系统响应速度,提高调解精度,积分系数用于消除系统稳态误差,微分系数用于改善系统动态特性;经模糊化后转为用模糊语言描述的模糊集合,建立输入和输出之间的模糊控制规则,根据规则离线算出模
糊控制表,并将其存于控制器中,在实时控制时将复杂的推理运算转化为简单的查表运算,提高了响应速度。
[0059]
单一的模糊pid控制响应速度快、基本没有超调,但稳态误差比较大;本发明提供的pid控制方法,针对存在注水、注肥两组调控,先判断整体误差,然后分别判断注水、注肥误差量,采用专家pid控制、模糊pid控制两种模式,具有很好的实时性和快速性,速度超调很小,而稳态精度很高,保证注水、注肥过程控制精度大大提高。
[0060]
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。