1.本公开涉及一种联合收割机。
背景技术:
2.[1]以往,有能够计算田地中的每单位区域的谷粒收获量即单位产量的联合收割机。
[0003]
在由计算机辅助的先进的田地管理中,田地中的每单位区域的产量分布为重要的数据。因此,例如,根据专利文献1的联合收割机具备产量测定器。在联合收割机一边行驶一边对从田地割取到的割取谷秆进行脱粒而得到的谷粒被储存在谷粒箱中之前,其谷粒量由产量测定器测定。基于所测定的谷粒量,计算每单位行驶距离的产量即单位行驶产量,根据该单位行驶产量和由gps单元计算出的收获行驶位置(行驶轨迹),生成产量地图数据。由于产量测定器构成为测定从脱粒装置输送并投入到谷粒箱中的谷粒,因此通过考虑谷秆的收获时刻与产量测定时刻之间的时间延迟,对由gps单元计算出的收获位置(田地位置)的单位区域分配在该单位区域中得到的谷粒量即产量。
[0004]
在联合收割机中,有时这样的时间延迟未必恒定。即,在联合收割机的脱粒处理中,例如如专利文献2所示,作为用于尽量避免在储存于谷粒箱的谷粒中混有秸秆的谷粒分选控制,进行上筛的开度调节、基于分选风机的分选风量的调节等。基于脱粒状态来调节上筛的开度或分选风机的风力,由此提高谷粒的分选性能,但是,由此,在再脱粒的二次处理物的处理量增大的情况下,谷秆的收获时刻与从该谷秆脱粒的谷粒的产量测定时刻之间的延迟时间改变,在收获位置的产量的分配产生误差。
[0005]
[2]以往,有能够计算田地中的每微小区域的谷粒收获量即产量的联合收割机。
[0006]
根据专利文献3的联合收割机具备:产量计测部,其计测通过脱粒得到的谷粒流入到谷粒箱中的流量;机体位置计测机构,其计测田地内的机体的位置。由产量计测部计测的产量示出比该产量计测时刻(由产量计测部进行的产量的计测时刻)早规定时间(延迟时间)的时刻下的收获量。该延迟时间是脱粒处理时间、到谷粒的产量计测部的输送时间等的合计时间。考虑到这一点,进行用于将由产量计测部计测的产量设为往过去追溯了该延迟时间的机体位置即田地微小区域中的产量的校正。但是,在谷秆的收割开始时,由于产量从零开始上升,因此产量难以稳定,但在根据专利文献3的联合收割机中,没有考虑这样的状况。在往过去追溯了延迟时间的机体位置是收割开始区域的情况下,分配给该微小区域的产量包含误差,无法得到田地整体的正确的产量分布。
[0007]
为了解决根据专利文献3的问题,根据专利文献4的联合收割机具备在检测到由割取部进行的种植谷秆的收割开始时修正收割开始时的单位产量的单位产量修正部。该单位产量修正部用在下一个微小区间计测的单位产量置换与种植谷秆的收割开始的微小区域对应的单位产量。由此,与收割开始时对应的产量计测值有可能成为偏离实际的值。
[0008]
现有技术文献
[0009]
专利文献
[0010]
专利文献1:wo2016/147521号公报
[0011]
专利文献2:日本国特开2003
‑
284424号公报
[0012]
专利文献3:日本国特开2005
‑
278539号公报
[0013]
专利文献4:日本国特开2017
‑
060443号公报
技术实现要素:
[0014]
发明要解决的课题
[0015]
[1]与背景技术[1]对应的课题如下所述。
[0016]
本发明的目的在于提供一种联合收割机,无论脱粒状态如何,都能够尽可能正确地计算田地中的每单位区域的产量。
[0017]
[2]与背景技术[2]对应的课题如下所述。
[0018]
在根据专利文献4的联合收割机中,由于分配给收割开始的微小区域的产量被分配给下一个微小区域的产量置换,因此为了得到田地整体的正确的产量分布,前提条件是从收割开始位置连续的微小区域的产量实质上相同。另外,在微小区域长度短的情况下,分配给收割开始的下一个微小区域的产量也可能包含与收割开始的最初的微小区域同样的误差。
[0019]
因此,期望一种采用了产量校正技术的联合收割机,该收获量校正技术能够使分配给收割开始的微小区域的产量更正确。
[0020]
用于解决课题的方案
[0021]
[1]与课题[1]对应的解决方案如下所述。
[0022]
根据本发明的联合收割机具备:割取部,其割取种植谷秆;脱粒装置,其具有处理割取谷秆的脱粒筒部和对从所述脱粒筒部落下的谷粒进行摆动分选的分选部;谷粒箱,其储存由所述分选部分选出的谷粒;产量测定器,其测定投入到所述谷粒箱中的谷粒量;单位产量计算部,其使用所述谷粒量来计算田地的每单位区域的单位产量;开度调节部,其根据所述脱粒装置的脱粒状态来调节所述分选部的上筛的开度;模式设定部,其设定使由所述单位产量计算部进行的单位产量计算的精度优先的产量精度优先模式;产量精度维持部,其在由所述模式设定部设定了所述产量精度优先模式的情况下,优先于由所述开度调整部产生的所述开度,强制地将所述上筛的开度固定为特定开度。
[0023]
另外,在根据本发明的计算联合收割机的产量的产量计算方法中,所述联合收割机具备:割取部,其割取种植谷秆;脱粒装置,其具有处理割取谷秆的脱粒筒部和对从所述脱粒筒部落下的谷粒进行摆动分选的分选部;谷粒箱,其储存由所述分选部分选出的谷粒;产量测定器,其测定投入到所述谷粒箱中的谷粒量;所述产量计算方法具备:单位产量计算步骤,其使用所述谷粒量来计算田地的每单位区域的单位产量;开度调节步骤,其根据所述脱粒装置的脱粒状态来调节所述分选部的上筛的开度;模式设定步骤,其设定使由所述单位产量计算步骤进行的单位产量计算的精度优先的产量精度优先模式;产量精度维持步骤,其在由所述模式设定步骤设定了所述产量精度优先模式的情况下,优先于由所述开度调整步骤产生的所述开度,强制地将所述上筛的开度固定为特定开度。
[0024]
根据该结构,在产量精度优先模式的设定时,通过将分选部的上筛的开度固定为特定开度,根据上筛的开度而变动的二次处理物的量实质上为恒定,或者减少到能够忽视
的程度。由此,实质上消除了由于在脱粒装置中作为一次处理物被送到谷粒箱中的谷粒量与作为二次处理物被送到谷粒箱中的谷粒量的比例的变动而产生的从收获时刻到产量测定时刻为止的通过时间变动(延迟时间的变动)。其结果,由单位产量计算部计算出的单位产量被正确地分配给收获区域(割取区域)。
[0025]
上筛的开度基于成为每个田地的收获对象的谷秆的生长状态等来设定,因此,在至少对每个田地设定在产量精度优先模式时使用的特定开度时,是有利的。因此,在本发明的一个优选的实施方式中,所述特定开度可选择。
[0026]
为了使联合收割机的脱粒性能最佳化,除了调整上筛的开度以外,例如还进行由分选风机产生的分选风的风力的变更。由于分选风的风力频繁地变更,当一次处理物量和二次处理物量的比例变动时,从收获时刻到产量测定时刻为止的谷粒的通过时间也变动,有可能导致产量向收获区域的分配不正确。该问题通过将分选风的风力设为恒定来解决。因此,在本发明的一个优选的实施方式中,具备风力变更部,该风力变更部变更将分选风供给到所述分选部的分选风机的风力,在设定了所述产量精度优先模式的情况下,所述产量精度维持部优先于由所述风力变更部产生的所述风力,强制地将所述分选风机的风力固定为特定风力。进而,如果构成为能够选择特定风力,则能够将分选风力固定为适合于每个田地的种植谷秆的生长状态等的值。
[0027]
在割取部为非割取作业状态的情况下,特别是在刚刚从割取作业状态向非割取作业状态的转移之后以外,割取谷秆不供给到脱粒装置,因此不需要基于产量精度优先模式的脱粒控制参数(上筛的开度或分选风机的转速)的固定化。因此,在本发明的一个优选的实施方式中,所述模式设定部具有判定所述割取部是割取作业状态还是非割取作业状态的功能,在所述割取部是所述割取作业状态的情况下设定所述产量精度优先模式,在所述割取部是所述非割取作业状态的情况下解除所述产量精度优先模式。
[0028]
用于判定割取部的割取作业状态或非割取作业状态的一个优选的方法是利用来自检测割取谷秆的存在的谷秆检测传感器的信号。谷秆检测传感器可以由限位开关那样的接触式传感器、使用了光或超声波的非接触式传感器构成。在本发明的一个优选的实施方式中,设置有检测所述割取部或所述脱粒装置中的所述割取谷秆的存在或不存在的谷秆检测传感器,在所述谷秆检测传感器检测到所述不存在的情况下,所述模式设定部判定所述非割取作业状态。
[0029]
即使在通过所述谷秆检测传感器检测到从割取谷秆存在向割取谷秆不存在的转移、即从割取部的割取作业状态向非割取作业状态的转移的情况下,在该转移之后,谷粒或谷秆还滞留在脱粒装置的分选区域。为了考虑该临时的滞留,在本发明的一个优选的实施方式中,设置有检测所述割取部或所述脱粒装置中的所述割取谷秆的存在或不存在的谷秆检测传感器,在所述谷秆检测传感器检测到所述不存在之后,通过经过一定的时间,所述模式设定部判定所述非割取作业状态。或者,在所述谷秆检测传感器检测到所述不存在后,通过一定距离的行驶,所述模式设定部判定所述非割取作业状态。
[0030]
在近年来开始普及的能够自动行驶的联合收割机中,能够使用卫星电波等计算出本车位置,进而,通过使用田地地图和行驶轨迹,能够检测割取部从作业区域进入到非作业区域。由此,在本发明的一个优选的实施方式中,具备检测割取作业路径中的所述割取部从作业区域进入到非作业区域的本车位置计算部,所述模式设定部将所述本车位置计算部检
测到所述割取部向所述非作业区域的进入作为触发,判定所述非割取作业状态。
[0031]
本发明的产量计算程序使计算机执行本发明的产量计算方法。另外,在本发明的计算机可读取的记录介质中,记录有本发明的产量计算程序。
[0032]
[2]与课题[2]对应的解决方案如下所述。
[0033]
根据本发明的联合收割机具备:割取部,其从田地割取种植谷秆;脱粒部,其对由所述割取部割取的割取谷秆进行脱粒;谷粒箱,其储存由所述脱粒部脱粒的谷粒;产量计测部,其计测从所述脱粒部送到所述谷粒箱中的谷粒的谷粒量作为计测产量;产量分配部,其对使用卫星定位计算出的计测点分配该计测点处的所述计测产量;指定部,其将位于割取开始区域的所述计测点指定为校正点,并且将位于所述校正点的周边的多个所述计测点指定为指定计测点;产量校正部,其基于分配给所述指定计测点的所述计测产量,校正分配给所述校正点的所述计测产量。
[0034]
另外,在根据本发明的校正联合收割机的产量的产量校正方法中,所述联合收割机具备:割取部,其从田地割取种植谷秆;脱粒部,其对由所述割取部割取的割取谷秆进行脱粒;谷粒箱,其储存由所述脱粒部脱粒的谷粒;产量计测部,其计测从所述脱粒部送到所述谷粒箱中的谷粒的谷粒量作为计测产量;所述产量校正方法具备:产量分配步骤,其对使用卫星定位计算出的计测点分配该计测点处的所述计测产量;指定步骤,其将位于割取开始区域的所述计测点指定为校正点,并且将位于所述校正点的周边的多个所述计测点指定为指定计测点;产量校正步骤,其基于分配给所述指定计测点的所述计测产量,校正分配给所述校正点的所述计测产量。
[0035]
根据该结构,在依次分配有基于产量计测部的计测产量的计测点中,位于收割开始区域的所述计测点成为校正该计测产量的对象(校正点)。校正点的新的计测产量基于位于该校正点的周边的多个所述计测点(指定计测点)的计测产量来计算。通过将从分配给分布在校正点的周边的多个计测点的计测产量导出的值设为校正点的新的计测产量,抑制在收割开始时的产量计测中的误差。特别是,由于将多个计测点的计测产量用于校正,因此即使在邻接的计测点的计测产量中也产生产量计测中的误差的情况下,也能够抑制该误差的影响。
[0036]
需要说明的是,在联合收割机的一般的作业行驶中,最初进行割取田地的外周区域的种植谷秆的旋转收割,由此形成的已收割区域被称为转向区域(枕地)。存在于已收割区域的内侧的未收割区域的种植谷秆将转向区域作为方向转换(u形转弯、α形转弯)区域,通过往复直线行驶(包括与直线类似的行驶)进行割取。从该转向区域到刚刚结束在未收割区域(未作业区域)中的割取而进入到转向区域之后的行驶状态被称为“收割开始”,从该未收割区域刚刚进入到转向区域之后的行驶状态被称为“收割结束”。
[0037]
由于种植谷秆的生长状态依存于田地中的生长位置,因此如果参照从要校正的点偏离太远的点的产量,则有可能产生大的偏差。因此,在本发明的一个优选的实施方式中,指定部选择位于距所述校正点规定距离内的所述计测点作为所述指定计测点。
[0038]
为了算出校正点处的新的计测产量而使用的指定计测点的个数越多,运算负荷越增加。为了避免该运算负荷的问题,在本发明的一个优选的实施方式中,所述指定部选择按照距所述校正点的距离短的顺序而选择的规定个数的所述计测点作为所述指定计测点。
[0039]
如上所述,在将转向区域作为方向转换(u形转弯、α形转弯)区域之后,在转向区域
的内侧的区域往复直线行驶的情况下,收割开始区域和收割结束区域接近地存在。位于收割结束区域的计测点的计测产量是由于从割取部到谷粒箱之间的输送时间的延迟而产生的,不是正确的计测产量。因此,在本发明的一个优选的实施方式中,所述指定部将位于收割结束区域的所述计测点设为无效计测点,从所述指定计测点排除。
[0040]
另外,作为校正点而指定的计测点,其计测产量由产量校正部校正。由于校正后的计测收量未必表示实际的值,因此优选不用于其他计测点的计测产量的校正。因此,在本发明的一个优选的实施方式中,所述指定部将分配了由所述产量校正部校正后的所述计测产量的所述计测点设为无效计测点,从所述指定计测点排除。
[0041]
在基于多个指定计测点的计测产量来计算校正点的计测产量的情况下,优选使用指定计测点的计测产量的统计学代表值。此时,在指定计测点散布的区域中的各指定计测点的产量的偏差少的情况下,能够使用算术平均值作为统计学代表值。但是,由于田地中的产量的偏差示出依存于距校正点的距离而变大的倾向,因此作为统计学代表值,优选使用使用了基于距校正点的距离而决定的权重的加权平均值。由此,在本发明的一个优选的实施方式中,所述产量校正部通过分配给所述指定计测点的所述计测产量的加权平均,求出分配给所述校正点的所述计测产量,在所述加权平均中,距所述校正点的距离越大,则赋予越大的权重。
[0042]
在本发明的一个优选的实施方式中,划分所述田地的微小区域设定为在该微小区域中包含至少一个所述计测点。由此,能够对各微小区域分配正确的产量。
[0043]
在农业经营管理中,重要的是研究田地中的产量的偏差,将其用于下一次的农作。由此,在本发明的一个优选的实施方式中,具备产量地图生成部,该产量地图生成部基于分配给所述计测点的所述计测产量,生成所述田地的产量分布地图。
[0044]
本发明的产量校正程序使计算机执行本发明的产量校正方法。另外,在本发明的计算机可读取的记录介质中,记录有本发明的产量校正程序。
附图说明
[0045]
图1是示出第一实施方式的图(以下,到图7为止相同),是示出联合收割机的整体的侧视图。
[0046]
图2是示出联合收割机的整体的俯视图。
[0047]
图3是示出脱粒装置的纵剖侧视图。
[0048]
图4是示出设置在谷粒箱内的产量测定器和谷粒品质测定器的剖视图。
[0049]
图5是产量测定器的俯视图。
[0050]
图6是用于说明用于求出田地的产量地图的控制功能的功能框图。
[0051]
图7是说明割取谷秆作为一次处理物或二次处理物被脱粒并被送到谷粒箱中的过程的示意图。
[0052]
图8是示出第二实施方式的图(以下,到图12为止相同),是示出联合收割机的整体的侧视图。
[0053]
图9是示出联合收割机的整体的俯视图。
[0054]
图10是示出设置在谷粒箱内的产量计测部和味道值计测部的示意图。
[0055]
图11是用于说明用于求出田地的产量地图的控制功能的功能框图。
[0056]
图12是用于说明收割开始区域的计测点处的测定收量的校正处理的说明图。
具体实施方式
[0057]
[第一实施方式]
[0058]
首先,参照图1~图7,对第一实施方式进行说明。
[0059]
以下,作为本发明的联合收割机的一例,举出全喂入联合收割机,基于附图进行说明。图1是示出联合收割机的整体的左侧视图。图2是示出联合收割机的整体的俯视图。图1和图2所示的[f]的方向定义为行驶机体1的前方向,[b]的方向定义为行驶机体1的后方向,图2所示的[l]的方向定义为行驶机体1的左方向,图2所示的[r]的方向定义为行驶机体1的右方向。
[0060]
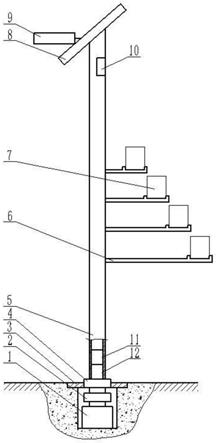
如图1以及图2所示,联合收割机具备行驶机体1,该行驶机体1装备有左右一对履带行驶装置2。在行驶机体1的前部的右侧部位,形成有驾驶部3。在驾驶部3上设置有驾驶席4。驾驶部3被驾驶室5覆盖。在驾驶席4的下方,设置有发动机(未图示)。在行驶机体1的后部设置有脱粒装置6以及谷粒箱7。脱粒装置6和谷粒箱7在谷粒箱7位于驾驶部3的后侧的状态下沿行驶机体1的横宽方向排列。在脱粒装置6的后部装备有排秆切碎装置8。割取输送装置9从行驶机体1的前部的脱粒装置侧的部位向前方延伸。割取输送装置9具备:输送部10,其从行驶机体1向前方可上下摆动操作地延伸;以及割取部11,其设置在行驶机体1的前方,后部与输送部10的前端部连结。割取部11通过升降缸12的伸缩对输送部10进行摆动操作,由此在下降作业状态和上升非作业状态之间进行升降操作。
[0061]
在联合收割机中,通过在使割取部11下降到下降作业状态的状态下使行驶机体1行驶,进行稻、麦、大豆等的收获作业。在割取部11中,田地的种植谷秆中的、位于行驶机体1的前方的种植谷秆的穗梢侧被旋转轮13向后方拨入,同时种植谷秆的茎根侧被割取装置14切断,进行种植谷秆的割取,从割取谷秆的茎根到穗梢为止的整体被绞龙15向输送部10输送。向输送部10输送的割取谷秆由输送部10向后方输送并供给到脱粒装置6。在脱粒装置6中,对供给的割取谷秆进行脱粒处理,进行将通过脱粒处理得到的谷粒分选为尘埃或谷秆片等的分选处理。脱粒排秆通过排秆切碎装置8进行切碎处理。切碎秸秆被排出口罩8a引导而向行驶机体1的后方排出。分选处理后的脱谷粒通过纵向送谷装置16向谷粒箱7输送,储存在谷粒箱7中。储存在谷粒箱7中的脱谷粒能够通过脱粒物排出装置17从谷粒箱7取出。
[0062]
如图3所示,脱粒装置6具备脱粒机体20。在脱粒机体20的上部形成有脱粒筒部6a,在脱粒机体20的下部形成有分选部6b。
[0063]
如图3所示,脱粒筒部6a具备:脱粒室21、设置于脱粒室21的脱粒筒22、以及设置于脱粒筒22的下方的筛网24。脱粒室21由脱粒机体20的左右的侧壁20s、前壁20f以及后壁20r、顶板25、筛网24形成。脱粒筒22经由旋转支轴22c被支承在前壁20f以及后壁20r上,以在旋转支轴22c的脱粒装置前后方向上延伸的轴芯为旋转轴芯y,由脱粒筒驱动部22d旋转驱动。脱粒筒22具备形成在前部的拨入部22a以及形成在拨入部22a的后侧的脱粒处理部22b。在顶板25的内表面侧支承有沿脱粒室21的前后方向排列的多个除尘阀25a。脱粒室21的左侧由脱粒罩28覆盖(参照图1、图2)。
[0064]
如图3所示,在脱粒筒部6a中,由输送部10供给到脱粒室21的前端部的割取谷秆被拨入部22a朝向脱粒筒22的后方拨入而供给到脱粒处理部22b。供给到脱粒处理部22b的割
取谷秆作为脱粒处理物通过脱粒齿23以及筛网24进行脱粒处理。由脱粒处理部22b赋予转动力的脱粒处理物与除尘阀25a抵接,由除尘阀25a引导而朝向脱粒室21的后方流动,一边朝向脱粒室21的后方移送一边进行脱粒处理。通过脱粒处理得到的谷粒通过筛网24的处理物漏下孔而落下到分选部6b。通过脱粒处理产生的作为脱粒尘埃的秸秆屑从位于脱粒室21的后部的排尘口26向脱粒室21的后方排出。从脱粒室21排出的秸秆屑从位于脱粒机体20的后部的排出口27流入到排秆切碎装置8。
[0065]
如图3所示,在分选部6b中,从筛网24漏下的脱粒处理物通过摆动分选装置30的谷粒抖动板33、筛线部34、上筛35、下筛36进行摇动,且接受来自分选风机38的分选风,一边向后方移送,一边对谷粒和秸秆屑等尘埃进行分选处理。作为通过分选处理得到的一次处理物的精粒(谷粒)落下到一次回收部391而被回收,通过一次回收部391向脱粒机体20的外部排出。排出的谷粒被交接到纵向送谷装置16(参照图2)。通过分选处理得到的一次处理物落下到二次回收部392而被回收,通过二次回收部392向脱粒机体20的外部排出,由还原装置(未图示)交接,通过还原装置返回到摆动分选装置30的前部。在摆动分选装置30中分选的秸秆屑等分选尘埃从排出口27向排秆切碎装置8流入。
[0066]
需要说明的是,虽然在图3中仅示意性地示出,但具备检测脱粒装置6中的割取谷秆的存在/不存在的谷秆检测传感器s1。该谷秆检测传感器s1具有从脱粒室21的顶板25向下方延伸的摆动杆。通过与进入到脱粒筒22和顶板25之间的割取谷秆接触,摆动杆摆动。通过该摆动位移的检测,检测割取谷秆的存在。如果摆动杆与割取谷秆的接触消失,则摆动杆通过弹簧返回到初始位置。通过该摆动杆的复位,检测割取谷秆的不存在。进而,在上筛35的上方,具备处理量检测传感器s2,该处理量检测传感器s2检测作为脱粒状态而落下到上筛35的脱粒处理物的量。
[0067]
虽然在图3中仅示意性地示出,但上筛35的开度能够通过上马达m1来调节。进而,分选风机38的风力也能够通过分选风机马达m2来变更。分选风机38的风力变更可以通过分选风机38的转速的调节或者送风口的开度的调节来进行。上马达m1以及分选风机马达m2基于处理量检测传感器s2的检测结果(脱粒状态)来控制。例如,当通过处理量检测传感器s2检测到脱粒处理物量多时,进行控制以使上筛35的开度或分选风机38的风力变大。另外,当检测到脱粒处理物量少时,进行控制以使上筛35的开度或分选风机38的风力变小。
[0068]
如图3和图4所示,产量测定器50设置在谷粒箱7的内部的上部位置,该产量测定器50测定从脱粒装置6通过第一处理物回收部391以及纵向送谷装置16(参照图2)投入到谷粒箱7中的谷粒的量即产量。进而,在该实施方式中,在与产量测定器50相对的位置,设置有计测谷粒的品质(水分或蛋白量等)的谷粒品质测定器40。
[0069]
如图5所示,产量测定器50具有平板状的检测板51、负载传感器52、支承检测板51以及负载传感器52的支承支架53、在谷粒箱7的内壁安装产量测定器50的安装支架54。负载传感器52以负载传感器52与支承支架53的连结部位为基端而被悬臂支承。通过该结构,当载荷作用于检测板51时,负载传感器52的应变变大。谷粒通过设置在纵向送谷装置16的上端的输出叶片16a而投入到储存空间q。此时,从输出叶片16a弹跳的谷粒内的一定的比例的谷粒与检测板51碰撞。由于弹跳到检测板51的谷粒的碰撞力(推压力),在负载传感器52中产生应变,产生电信号。该电信号作为用于计算谷粒的流量的检测信号而使用。电信号例如为电压值或电流值。从纵向送谷装置16送来的谷粒的投入量越多,谷粒对检测板51的推压
力成比例地变大,负载传感器52的检测信号也变大。通过这样的测定原理,产量测定器50测定投入到谷粒箱7中的谷粒量。
[0070]
谷粒品质测定器40具有:临时储存作为计测对象的谷粒的临时储存部41;对由临时储存部41储存的谷粒进行计测作用而计测品质的计测部42。临时储存部41位于谷粒箱7的内方侧,计测部42位于谷粒箱7的外方侧。计测部42收纳在形成为密闭状的收纳盒43的内部。临时储存部41具备与收纳盒43的内方侧的侧面一体地连结的大致方筒状的储存用盒44,能够在其内部储存谷粒。在储存用盒44的内部,形成有沿上下方向贯通的上下方向通路45,在上下方向通路45的中途具备闸门46。闸门46构成为能够位置变更为闭塞上下方向通路45的中途的关闭位置和开放上下方向通路45的中途的打开位置。在上下方向通路45的上端,形成有谷粒的取入口45a。由纵向送谷装置16的输出叶片16a放出的谷粒的一部分被取入到取入口45a。在闸门46被切换为关闭状态的状态下,谷粒储存在上下方向通路45中比闸门46更靠上侧而形成的临时储存空间45s中。当闸门46切换为打开状态时,储存的谷粒落下。计测部42朝向临时地储存在临时储存空间45s中的谷粒照射光,基于通过谷粒而返回的光,使用作为公知技术的分光分析方法来测定谷粒的味道值(水分或蛋白质)作为谷粒品质。
[0071]
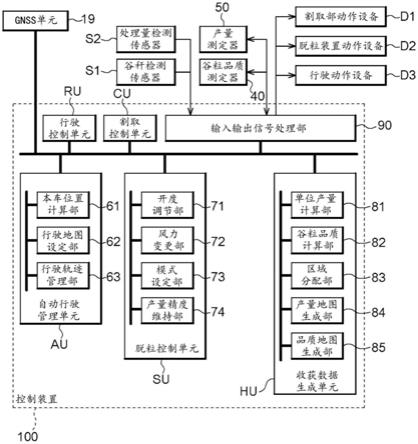
图6中示出了说明用于测定田地的每单位区域(微小区域)的谷粒量(产量)并求出田地的产量地图(谷粒量分布图)的控制功能的功能框图。
[0072]
该联合收割机能够沿着预先设定的行驶路径(行驶地图)自动行驶。因此,具备接收卫星电波并运算位置坐标的gnss单元19,在控制装置100中,具备自动行驶管理单元au。自动行驶管理单元au包括本车位置计算部61、行驶地图设定部62、行驶轨迹管理部63等。本车位置计算部61基于从gnss单元19输出的位置坐标,计算田地中的本车位置,更详细而言,计算种植谷秆的割取位置(收获位置)。行驶地图设定部62在自动行驶时设定目标行驶路径。行驶轨迹管理部63生成行驶机体1(参照图1)的行驶轨迹,管理田地中的未作业区域、已作业区域、转向区域(从作业路径转移到下一作业路径时利用的区域,也称为枕地)。需要说明的是,因为在转向区域中不进行割取作业,因此原则上可以将转向区域视为非作业区域。根据该结构,本车位置计算部61在割取部11从作业区域进入到非作业区域时,能够输出非作业区域进入的信号或标志。
[0073]
进而,在控制装置100中,具备行驶控制单元ru、割取控制单元cu、脱粒控制单元su、收获数据生成单元hu。行驶控制单元ru生成与行驶控制相关的控制信号,经由输入输出信号处理部90发送到行驶动作设备d3,控制行驶机体1的行驶。割取控制单元cu生成与割取控制相关的控制信号,经由输入输出信号处理部90发送到割取部动作设备d1,控制割取部11的动作。上述的处理量检测传感器s2、谷秆检测传感器s1、产量测定器50、谷粒品质测定器40也经由输入输出信号处理部90在与控制装置100之间送入信号或数据。
[0074]
进而,参照图1以及图3,图6所示的脱粒控制单元su生成与脱粒控制相关的控制信号,经由输入输出信号处理部90发送到脱粒装置动作设备d2,控制脱粒装置6。在脱粒装置动作设备d2中,包括上述的上马达m1、分选风机马达m2。在脱粒控制单元su中,包括开度调节部71、风力变更部72、模式设定部73、产量精度维持部74。开度调节部71根据脱粒装置6的脱粒状态来调节分选部6b的上筛35的开度。具体而言,如果检测落下到上筛35上的脱粒处理物的量的处理量检测传感器s2的检测值变大,则控制上马达m1,以使上筛35的开度变大,
抑制脱粒处理物在上筛35上的滞留。如果上筛35的开度大,则由一次回收部391回收的谷粒变多,如果上筛35的开度小,则由二次回收部392回收并再脱粒的脱粒处理物的量增加。风力变更部72也根据脱粒装置6的脱粒状态来变更分选风机38的风力。具体而言,如果处理量检测传感器s2的检测值变大,则控制分选风机马达m2,以使分选风机39的风力变大,将脱粒不充分的脱粒处理物送到二次回收部392。即,如果分选风机38的风力变大,则由二次回收部392回收的脱粒处理物的量增加。
[0075]
如图7示意性所示,由二次回收部392(参照图3)回收的脱粒处理物被再脱粒以及再分选,之后作为再脱粒谷粒被回收到第一回收部391(参照图3),因此与直接由一次回收部391回收的谷粒相比,在脱粒装置6中的滞留时间变长。即,从由割取部11割取并送入到脱粒装置6的割取谷秆到脱粒的谷粒从脱粒装置6送入到谷粒箱7为止的平均输送时间(延迟时间)根据二次回收量而变动。该变动直接影响从割取部11到谷粒箱7的割取谷秆或谷粒的滞留时间(延迟时间),该滞留时间在将由产量测定器50的测定产量作为割取位置的产量进行分配的情况下是必要的。
[0076]
模式设定部73设定收量精度优先模式,在操作者进行的指示或预先设定的条件成立时,通过抑制由二次回收部392回收的二次处理物的量,提高从由割取部11割取的割取谷秆得到的谷粒的量(产量)的计算精度。产量精度维持部74在由模式设定部73设定了所述产量精度优先模式的情况下,强制地将上筛35的开度固定为特定开度。特定开度包括上筛35的完全闭锁,是比以往进行的脱粒控制的平均开度小的开度。作为该特定开度,也可以预先设定多个阶段的开度,操作者根据农作物的状态等进行判断,可以地自由选择应使用的特定开度。进而,产量精度维持部74在由模式设定部73设定了产量精度优先模式的情况下,将上筛35的开度设定为特定开度,分选风机38的风力也设定为预先确定的特定风力。该特定风力也可以准备多个,操作者根据农作物的状态等进行判断,可以自由地选择应使用的特定风力。
[0077]
在联合收割机为非割取作业状态的情况下,实质上不进行种植谷秆的割取,也不取得谷粒。因此,在联合收割机为非割取作业状态的情况下,不需要设定产量精度优先模式。因此,模式设定部73构成为,具有判定联合收割机是割取作业状态还是非割取作业状态的功能,在判定为割取作业状态的情况下设定产量精度优先模式,在判定为非割取作业状态的情况下解除产量精度优先模式。
[0078]
以下列举模式设定部73为了设定产量精度优先模式的条件。其中的至少一个作为非割取作业状态的判定条件而实际使用。
[0079]
(1)在检测脱粒装置6中的谷秆的存在或者不存在的谷秆检测传感器s1检测到谷秆不存在的情况下,模式设定部73判定非割取作业状态。
[0080]
(2)在谷秆检测传感器s1检测到谷秆不存在之后,通过经过一定的时间,模式设定部73判定非割取作业状态。由此,解决了在检测到谷秆不存在之后稍微残存的割取谷秆的脱粒处理中,不应用产量精度优先模式的问题。
[0081]
(3)与(2)实质上是同样的对策,在谷秆检测传感器s1检测到谷秆不存在之后,通过一定距离的行驶,模式设定部73判定非割取作业状态。
[0082]
(4)如上所述,本车位置计算部61在割取部11从作业区域进入到非作业区域时,能够输出非作业区域进入的信号或标志。将该信号或标志的输出作为触发,模式设定部73判
定非割取作业状态。
[0083]
在收获数据生成单元hu中,包括单位产量计算部81、谷粒品质计算部82、区域分配部83、产量地图生成部84、品质地图生成部85。单位产量计算部81根据从产量测定器50逐次送来的谷粒量数据,计算田地的每单位区域的单位产量。在此,作为单位区域,采用以割取部11的收割宽度为一边或以收割宽度的一半到数倍为一边、以收割宽度的一半到数倍为另一边的正方形或长方形的区域作为单位区域。将在该单位区域中行驶的期间测定的谷粒量作为单位产量而计算出。谷粒品质计算部82计算在该单位区域中取得的谷粒的味道值作为单位味道值。
[0084]
区域分配部83使用从割取点到产量计测点的谷粒滞留时间即延迟时间,将由单位产量计算部81计算出的单位产量分配给作为实际的割取区域的单位区域。同样地,区域分配部83将由谷粒品质计算部82计算出的单位味道值也分配给作为实际的割取区域的单位区域。
[0085]
产量地图生成部84使用由单位产量计算部81计算出的分配给作为实际的割取区域的单位区域的单位产量,生成表示以单位区域为单位的产量分布的产量地图。品质地图生成部85使用分配给作为实际的割取区域的单位区域的单位味道值,生成表示以单位区域为单位的味道值分布的谷粒品质地图。
[0086]
另外,作为计算所述联合收割机的产量的产量计算方法,具备:单位产量计算步骤,其使用所述谷粒量来计算田地的每单位区域的单位产量;开度调节步骤,其根据脱粒装置6的脱粒状态来调节分选部6b的上筛的开度;模式设定步骤,其设定使由所述单位产量计算步骤进行的单位产量计算的精度优先的产量精度优先模式;产量精度维持步骤,其在由所述模式设定步骤设定了所述产量精度优先模式的情况下,优先于由所述开度调整步骤产生的所述开度,强制地将所述上筛的开度固定为特定开度。
[0087]
另外,本实施方式的产量计算程序使计算机执行本实施方式的产量计算方法。本实施方式的计算机可读取的记录介质记录有使计算机执行本实施方式的产量计算方法的程序。
[0088]
[第一实施方式的其他实施方式]
[0089]
(1)在上述的实施方式中,产量测定器50构成为,基于由输出叶片16a投入的谷粒对检测板51施加的推压力,求出谷粒量。也可以取而代之,采用产量测定器50,该产量测定器50利用图4所示的谷粒品质测定器40的临时储存部41,根据谷粒达到规定容积的时间,测定每单位时间的谷粒量或每单位行驶距离的谷粒量。当然,也可以不将临时储存部41兼用作谷粒品质测定器40,而是使产量测定器50具有单独的临时储存部41,测定每单位时间的谷粒量或每单位行驶距离的谷粒量。另外,也可以在从脱粒装置6到谷粒箱7的谷粒输送路径中,设置粒状物流量测定器,测定每单位时间的谷粒量或每单位行驶距离的谷粒量。
[0090]
(2)在上述的实施方式中,作为联合收割机,处理为全喂入联合收割机,但也可以取而代之,处理为半喂入联合收割机。在半喂入联合收割机中,作为谷秆检测传感器s1,使用设置在割取部11上的、检测谷秆的进入的摆动杆式传感器。
[0091]
在上述的实施方式中,在模式设定部73设定了产量精度优先模式的情况下,通过固定为上筛35的特定开度,以及将分选风机38的风力固定为特定风力,抑制了二次处理物的产生。作为产量精度优先模式设定时的其他实施方式,也可以是仅进行上筛35的开度固
定和分选风机38的风力固定中的某一方的结构。或者,在除尘阀25a为姿态可变式的情况下,作为产量精度优先模式设定时的其他实施方式,还可以追加将除尘阀25a固定为特定姿态。
[0092]
(3)本发明能够应用于能够计算田地中的每单位面积的产量的联合收割机。
[0093]
[第二实施方式]
[0094]
接下来,参照图8~图12,对第二实施方式进行说明。
[0095]
以下,作为本发明的联合收割机的一例,举出全喂入联合收割机,基于附图进行说明。图8是示出联合收割机的整体的左侧视图。图9是示出联合收割机的整体的俯视图。图8和图9所示的[f]的方向定义为行驶机体201的前方向,[b]的方向定义为行驶机体201的后方向,图9所示的[l]的方向定义为行驶机体201的左方向,图9所示的[r]的方向定义为行驶机体201的右方向。
[0096]
如图8以及图9所示,联合收割机具备行驶机体201,该行驶机体1装备有左右一对履带行驶装置202。在行驶机体201的前部的右侧部位,形成有驾驶部203。在驾驶部203上设置有驾驶席204。驾驶部203被驾驶室205覆盖。在驾驶席204的下方,设置有发动机(未图示)。在行驶机体201的后部设置有脱粒装置206以及谷粒箱207。脱粒装置206和谷粒箱207在谷粒箱207位于驾驶部203的后侧的状态下沿行驶机体201的横宽方向排列。在脱粒装置206的后部装备有排秆切碎装置208。割取输送装置209从行驶机体201的前部的脱粒装置206侧的部位向前方延伸。割取输送装置209具备:输送部210,其从行驶机体201向前方可上下摆动操作地延伸;以及割取部211,其设置在行驶机体201的前方,后部与输送部210的前端部连结。割取部211通过升降缸212的伸缩对输送部210进行摆动操作,由此在下降作业状态和上升非作业状态之间进行升降操作。
[0097]
在联合收割机中,通过在使割取部211下降到下降作业状态的状态下使行驶机体201行驶,进行稻、麦、大豆等的收获作业。在割取部211中,田地的种植谷秆中的、位于行驶机体201的前方的种植谷秆的穗梢侧被旋转轮213向后方拨入,同时种植谷秆的茎根侧被割取装置214切断,进行种植谷秆的割取,从割取谷秆的茎根到穗梢为止的整体被绞龙215向输送部210输送。向输送部210输送的割取谷秆由输送部210向后方输送并供给到脱粒装置206的脱粒部206a。在输送部210中,被供给的割取谷秆被脱粒处理,分选处理后的谷粒通过纵向送谷装置216向谷粒箱207输送,储存在谷粒箱207中。储存在谷粒箱207中的谷粒能够通过脱粒物排出装置217从谷粒箱207取出。
[0098]
需要说明的是,虽然在图8中仅示意性地示出,但具备检测脱粒装置206中的割取谷秆的存在/不存在的谷秆检测传感器s12。该谷秆检测传感器s12通过与进入到脱粒部206a的割取谷秆接触而摆动。通过割取谷秆的存在的检测来检测联合收割机的作业状态,通过割取谷秆的不存在的检测来检测联合收割机的非作业状态。
[0099]
在图10中,示出了测定从脱粒装置206通过纵向送谷装置216投入到谷粒箱207中的谷粒的量即产量的产量计测部250、以及计测投入到谷粒箱207中的谷粒的品质(水分或蛋白量等)的味道值计测部240。
[0100]
产量计测部250组装在谷粒放出装置207a中。谷粒放出装置207a通过旋转板将输送来的谷粒扩散放出到谷粒箱207的内部。产量计测部250根据因旋转板的每次旋转而扩散放出的谷粒的碰撞力而应变的称重传感器的信号来计算谷粒的流量。产量计测部250基于
投入到谷粒箱207中的谷粒的旋转板的旋转周期即规定周期下的谷粒的流量来运算计测产量。
[0101]
味道值计测部240临时地储存由谷粒放出装置207a扩散放出的谷粒的一部分,朝向该储存的谷粒照射光,对通过谷粒而返回的光进行分光分析,计测谷粒的味道值(水分或蛋白质)。周期性地进行这样的谷粒的临时储存以及味道值计测。
[0102]
图11中示出了说明用于测定田地的每单位区域(微小区域)的谷粒量(产量)并求出田地的产量地图(谷粒量分布图)的控制功能的功能框图。
[0103]
该联合收割机能够沿着预先设定的行驶路径(行驶地图)自动行驶。因此,如图8以及图9所示,在驾驶室205的天花板的上表面,设置有gnss单元219,该gnss单元219具有接收卫星电波并运算位置坐标的卫星定位功能。如图11所示,在控制装置300中,具备自动行驶管理单元au2。在自动行驶管理单元au2中,包括本车位置计算部261、行驶地图设定部262、行驶轨迹管理部263等。本车位置计算部261基于从gnss单元219输出的位置坐标,计算田地中的本车位置,更详细而言,计算种植谷秆的割取位置(收获位置)。行驶地图设定部262在自动行驶时设定目标行驶路径。行驶轨迹管理部263生成行驶机体201的行驶轨迹,管理田地中的未作业区域、已作业区域、转向区域(从作业路径转移到下一作业路径时利用的区域,也称为枕地。参照图12)。需要说明的是,如上所述,转向区域也是已经进行了割取作业的已作业区域。通过该结构,本车位置计算部261能够管理割取部211刚刚从转向区域进入到未收割区域(未作业区域)之后的行驶状态即“收割开始”、以及割取部211刚刚结束在未收割区域中的割取而进入到转向区域之后的行驶状态即“收割结束”,输出表示该状态的信号或标志。
[0104]“收割开始”以及“收割结束”也可以根据谷秆检测传感器s12的检测结果来判定。例如,在谷秆检测传感器s12检测到主干不存在、行驶了1~2m的阶段,能够判定“收割结束”。
[0105]
进而,在控制装置300中,具备行驶控制单元ru、作业控制单元cu2、产量地图生成单元hu2、味道值地图生成单元fu2。行驶控制单元ru2生成与行驶控制相关的控制信号,经由输入输出信号处理部290发送到行驶动作设备d22,控制行驶机体201的行驶。作业控制单元cu2生成与割取控制或脱粒控制等作业相关的控制信号,经由输入输出信号处理部290发送到作业用动作设备d12,控制割取部211或脱粒装置206等的动作。上述的产量计测部250和味道值计测部240也经由输入输出信号处理部290在与控制装置300之间交换信号或数据。
[0106]
在产量地图生成单元hu2中,包括产量分配部271、指定部272、产量校正部273、产量地图生成部274。产量分配部271将由本车位置计算部261计算出并设定的割取部211的位置作为计测点,对该计测点分配从产量计测部250送来的计测产量。
[0107]
需要说明的是,产量计测部250基于旋转板旋转一周的周期中的负载传感器的最大值来计测谷粒量。如果旋转板的旋转周期为几分之一秒左右,则在1秒内计测数次谷粒量。因此,在该实施方式中,将通过对1秒内计测的谷粒量进行累计而得到的每秒的谷粒量作为计测产量,发送到产量地图生成单元hu2。因此,分配计测产量的计测点也根据大致每1秒计算出的割取部211的位置来设定。
[0108]
在收割开始时,由于在从割取部211到谷粒箱207的路径中谷粒几乎不滞留,因此
即使考虑从割取部211到谷粒箱207的谷粒的延迟时间,在分配给该计测点的计测产量中产生误差的可能性也高。由此,需要对分配给在收割开始时设定的计测点的计测产量进行校正。在该实施方式中,分配给在收割开始时设定的计测点的计测产量被置换为基于分配给其周边的计测点群的计测产量而计算出的新的计测产量。
[0109]
指定部272将位于成为校正对象的收割开始区域的计测点作为校正点,将位于该校正点的周边的多个计测点指定为指定计测点。产量校正部273基于分配给指定计测点的计测产量,对分配给作为校正对象的校正点的计测产量进行校正(改写)。
[0110]
以下,使用图12,对分配给校正点的计测产量的校正运算的一例进行说明。在图12中,计测点群用从p11到p4m的附图标记表示。校正点是位于作为校正对象区域的收割开始区域的计测点:p24,是被涂黑的o。
[0111]
成为基于指定部272的指定计测点的对象的计测点群是距校正点:p24在规定距离内的计测点。关于距校正点:p24在规定距离内的计测点,进入到以校正点:p24为中心、以规定距离为半径的圆内的计测点成为指定计测点,但在此简化,将由p11~p16、p21~p26、p31~p36表示的计测点设为指定计测点。进而,在该校正处理中,从成为指定计测点的对象的计测点选择无效计测点。成为无效计测点的是位于收割结束区域的计测点(在图12中,为p31和p32)、以及分配了由产量校正部273校正的所述计测产量的计测点(在图12中,为p11~p14、p21~p23),被从指定的计测点群中排除。由此,最终用于校正点的校正的指定计测点群为由p11~p16、p25、p26、p31~p36表示的计测点。
[0112]
根据分配给指定计测点群的计测产量求出新分配给校正点的计测产量,在该实施方式中的校正算法中使用加权平均。在此,将分配给p11~p16、p25、p26、p31~p36表示的计测点的计测产量依次设为q11~q16、q25、q26、q31~q36,对各计测点赋予的权重:w是以距校正点的距离为变量的函数值,设为w11~w16、w25、w26、w31~w36。
[0113]
由此,新分配给校正点的计测产量为
[0114]
(q11
·
w11
……
q31
·
w31)/(w11
……
w31)。
[0115]
这样,最初分配给位于收割开始区域的计测点的全部的计测产量由产量校正部273校正(改写)。
[0116]
加权平均中的权重可以通过以下各种方法来决定。
[0117]
(a)对校正点:p24赋予权重“w24=1.0”,对指定计测点群中距校正点最远的计测点(假设为p36)赋予权重“w36=0.0”。剩余的指定计测点群的权重设为从“1.0”减去从校正点:p24到各计测点的距离和从校正点:p24到计测点:p36的距离的比率:ρ的值(1.0>1.0
‑
ρ>0.0)。
[0118]
(b)对校正点:p24赋予权重“w24=1.0”,对指定计测点群中距校正点最远的计测点(假设为p36)赋予权重“w36=0.5”。剩余的指定计测点群的权重使用从“1.0“减去从校正点:p24到各计测点的距离和从校正点:p24到计测点:p36的距离的比率:ρ的值(1.0
‑
ρ)按比例分配。即,剩余的各计测点的权重为“0.5 0.5
×
(1.0
‑
ρ)=0.5
×
(2.0
‑
ρ)”。
[0119]
(c)作为用于求出权重更通用的方法,能够使用将上述的比率:(1.0
‑
ρ)作为变量而导出剩余的各测量点的权重的函数:g。该函数可以是线性函数,但也可以是二次函数或阶梯函数等非线性函数。
[0120]
进而,计算分配给作为校正对象的校正点的计测产量的上述的校正算法是一例,
以下列举其他校正算法,但本发明并不限定于此。例如,
[0121]
(1)也可以首先将指定计测点的对象设为田地整体的计测点群,仅选择规定个数的距校正点的距离短的计测点,进而在通过无效计测点的判定进行分选之后,追加无效计测点的数量的指定计测点。
[0122]
(2)也可以在由行驶轨迹管理部263检测到转向区域与该转向区域的内部区域的边界线、即收割结束边界线或收割开始边界线的情况下,从最初开始仅将位于转向区域的内部区域的计测点设为指定计测点的对象。
[0123]
(3)也可以在用于指定计测点的对象区域较小的情况下(将距用于指定指定计测点的校正点的距离设定为较小的情况下),代替加权平均而使用算术平均。
[0124]
产量地图生成部274基于分配给包含由产量校正部273校正的计测点在内的全部的计测点的计测产量,计算田地的每个微小区域的产量,生成田地的产量分布地图。
[0125]
在味道值地图生成单元fu2中,包括味道值分配部281和品质地图生成部282。味道值分配部281使用从味道值计测部240送来的味道值、从本车位置计算部261送来的本车位置(割取部211的位置)、从割取谷秆脱粒的谷粒到达味道值计测部240为止的延迟时间,将味道值分配给田地的微小区域。品质地图生成部282使用分配给田地的微小区域的味道值,生成田地的味道值分布地图。在味道值对微小区间的分配中,也可以采用上述的、与产量对微小区间的分配相关的校正方法。
[0126]
需要说明的是,如果产量分布地图和味道值分布地图是在收获作业结束后生成的,则产量地图生成部274和品质地图生成部282也可以不设置在联合收割机中。产量地图生成部274和品质地图生成部282也可以设置在务农作业从业者所拥有的平板电脑、智能手机、或者云服务的电脑中。
[0127]
另外,作为校正所述联合收割机的产量的产量校正方法,具备:产量分配步骤,其对使用卫星定位计算出的计测点分配该计测点处的所述计测产量;指定步骤,其将位于割取开始区域的所述计测点指定为校正点,并且将位于所述校正点的周边的多个所述计测点指定为指定计测点;产量校正步骤,其基于分配给所述指定计测点的所述计测产量,校正分配给所述校正点的所述计测产量。
[0128]
另外,本实施方式的产量校正程序使计算机执行本实施方式的产量校正方法。本实施方式的计算机可读取的记录介质记录有使计算机执行本实施方式的产量校正方法的程序。
[0129]
[其他实施方式]
[0130]
(1)在上述的实施方式中,产量计测部250构成为根据因旋转板的每次旋转而扩散放出的谷粒的碰撞力而应变的称重传感器的信号来计算谷粒的流量。也可以取而代之,采用产量计测部250,该产量计测部50设置临时储存扩散放出的谷粒的临时储存室,根据临时储存的谷粒达到规定容积的时间,测定每单位时间的谷粒量或每单位行驶距离的谷粒量。另外,也可以在从脱粒装置206到谷粒箱207的谷粒输送路径中,设置粒状物流量测定器,测定每单位时间的谷粒量或每单位行驶距离的谷粒量。
[0131]
(2)在上述的实施方式中,作为联合收割机,处理为全喂入联合收割机,但也可以取而代之,处理为半喂入联合收割机。在半喂入联合收割机中,作为谷秆检测传感器s12,使用设置在割取部211上的、检测谷秆的进入的摆动杆式传感器。
[0132]
(3)本发明能够应用于能够计算田地中的每微小区域的产量的联合收割机。
[0133]
附图标记说明
[0134]
[第一实施方式]
[0135]
6:脱粒装置
[0136]
6a:脱粒筒部
[0137]
6b:分选部
[0138]
7:谷粒箱
[0139]
11:割取部
[0140]
22:脱粒筒
[0141]
25a:除尘阀
[0142]
35:上筛
[0143]
38:分选风机
[0144]
40:谷粒品质测定器
[0145]
50:产量测定器
[0146]
61:本车位置计算部
[0147]
71:开度调节部
[0148]
72:风力变更部
[0149]
73:模式设定部
[0150]
74:产量精度维持部
[0151]
81:单位产量计算部
[0152]
83:区域分配部
[0153]
84:产量地图生成部
[0154]
85:品质地图生成部
[0155]
100:控制装置
[0156]
391:一次回收部
[0157]
392:二次回收部
[0158]
m1:上马达
[0159]
m2:分选风机马达
[0160]
s1:谷秆检测传感器
[0161]
s2:处理量检测传感器
[0162]
su:脱粒控制单元
[0163]
[第二实施方式]
[0164]
206:脱粒装置
[0165]
206a:脱粒部
[0166]
207:谷粒箱
[0167]
211:割取部
[0168]
219:gnss单元
[0169]
250:产量计测部
[0170]
261:本车位置计算部
[0171]
262:行驶地图设定部
[0172]
263:行驶轨迹管理部
[0173]
271:产量分配部
[0174]
272:指定部
[0175]
273:产量校正部
[0176]
274:产量地图生成部
[0177]
281:味道值分配部
[0178]
282:品质地图生成部
[0179]
300:控制装置
[0180]
fu2:味道值地图生成单元
[0181]
hu2:产量地图生成单元。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。