1.本发明涉及医疗器械领域,尤其涉及一种自适应椎体的微创撑开试模装置。
背景技术:
2.在日渐成熟的微创脊柱外科手术中,许多术式都需要用到椎体撑开装置将椎间隙预先撑开或复位,例如脊柱融合手术、经皮椎体成形术、经皮椎体后凸成形术等。
3.为此,本领域技术人员对椎体撑开器进行了大量的研究,例如专利cn202011166004.9公开了一种微创椎体撑开器,包括撑开装置和控制撑开装置撑开的成型器械;其中,撑开装置包括固定块、撑开块和推进块;固定块和推进块相对面设置有限位块,通过限位块,撑开块在固定块与推进块中间实现串联滑动限位,推进块沿靠近固定块的方向滑动时,撑开块向上和/或向下撑开。
4.然而,上述椎体撑开器存在以下缺陷:
5.(1)上下撑开块之间角度固定,在椎体融合手术时,患者卧在手术床上,由于患者本身的体型和患病情况的差异,椎体恢复不到理想的生理曲度,椎间隙两侧往往不是平行的是成一定角度的,而上述固定角度的撑开器在不定角度的椎间隙间会造成受力不均匀,由于椎体终板承力有限,局部受力较大处极其容易造成椎体终板损伤;
6.(2)该椎体撑开器通过串联滑动块达到撑开的目的,撑开过程中通过滑动块滑动将水平方向的运动转化为垂直方向的运动,水平力分解成垂直力,即转化过程中有力的损耗,导致实际使用会很费力;
7.(3)该椎体撑开器的技术核心为串联滑动块的滑动,在微创手术时,通过内径为7mm的工作通道,很容易使组织嵌入到滑槽的间隙内,阻碍器械撑开,使器械使用失败;
8.(4)该椎体撑开器没有试模的功能,即测量椎体撑开高度和插入椎体深度的功能,通过手术中测量确认,指导后续手术进程。
9.因此,提供一种椎体撑开装置,其在撑开过程中能够适应椎间隙不同角度,更好的贴合椎体终板,结构稳定可靠,易操作,可以提供试模功能,是一个亟待解决的技术问题。
技术实现要素:
10.针对现有技术的上述缺陷,本发明提供了一种自适应椎体的微创撑开试模装置。
11.一种自适应椎体的微创撑开试模装置,包括远端的撑开单元和近端的控制手柄;其中,
12.所述撑开单元包括中间杆、前部支撑件、后部支撑件、撑开片和推进座;所述前部支撑件和所述后部支撑件包括第一支撑杆和第二支撑杆组成的支撑组件,所述第一支撑杆和所述第二支撑杆的一端相互铰接,另一端与所述撑开片的中部铰接,所述第一支撑杆和所述第二支撑杆相对的一侧上设有阶梯槽,使得所述第一支撑杆和所述第二支撑杆一端铰接后形成的所述支撑组件整体宽度相同;所述后部支撑件的远离撑开片的一端、所述中间杆近端设置的通槽和所述推进座远端三者铰接;
13.所述控制手柄通过控制所述推进座相对于所述通槽向远端或近端滑动,控制所述后部支撑件的撑开与闭合,实现撑开片的撑开或闭合。
14.优选地,所述中间杆的远端设有头部,所述头部为由远及近逐渐变大的锥体,所述锥体的远端面为圆弧面;所述中间杆的中部设有十字座,所述十字座的远端面沿远端方向延伸出远端杆,所述远端杆的另一端与所述头部的近端面固定,所述十字座的近端面沿近端方向延伸出近端杆,所述近端杆设有所述通槽。
15.优选地,所述撑开片包括结构相同的上撑开片和下撑开片,所述撑开片远端向靠近中间杆的方向弯曲一定弧度,所述上撑开片和下撑开片最远端要远于所述头部的最高处,且所述上撑开片和所述下撑开片最远端最小宽度要小于所述头部最高处高度。
16.优选地,所述撑开片中部设有十字型的加强座,所述加强座的近端和远端分别向远离所述加强座的方向延伸出加强肋;所述加强座的远端和近端分别设有铰接孔,所述前部支撑件与远端的所述铰接孔铰接,所述后部支撑件与近端的所述铰接孔铰接。
17.优选地,所述撑开片与椎体终板接触的一侧上设有显影槽。
18.优选地,在所述十字座中部,垂直于轴向的部位的近端侧和远端侧分别沿远离十字座的方向延伸出加强部,所述加强部与近端杆和远端杆的左右两侧固定。
19.优选地,一支杆穿过所述后部支撑件的近端与所述推进座的远端形成的铰接部位后,穿过中间杆近端设置的所述通槽,穿入所述中间杆另一侧的所述后部支撑件的近端与所述推进座的远端形成的铰接部位。
20.优选地,所述控制手柄包括外管、传动管和操作组件;所述传动管套设于所述外管内,所述外管的远端与中间杆的近端固定连接,所述传动管的远端与所述推进座固定连接,所述操作组件带动所述传动管相对于外管沿轴向运动,所述传动管带动推进座相对于所述中间杆沿轴向运动。
21.优选地,所述操作组件包括滑块、手柄座、转动旋钮和旋钮盖;所述外管的近端与所述手柄座的远端固定连接,所述传动管的近端与所述手柄座内的所述滑块固定连接,所述手柄座两侧对称设有滑槽,所述滑块的两侧分别延伸出两凸起,所述凸起穿过所述滑槽,实现所述滑块与所述手柄座周向限位轴向可滑动连接。
22.优选地,所述手柄座尾端设有外螺纹,与所述转动旋钮的内螺纹配合,所述转动旋钮与所述旋钮盖轴向限位周向可旋转固定,所述滑块的凸起穿过所述滑槽后被卡在所述转动旋钮与所述旋钮盖的装配后形成的空腔内;所述手柄座上设有刻度,用于标记所述转动旋钮和所述旋钮盖的位移变化。
23.与现有技术相比,本发明的技术效果为:
24.(1)通过异形的第一支撑杆和第二支撑杆的组合设计,显著增强支撑强度,使得支撑组件提供稳定的支撑力将上、下撑开片撑开的同时,不增加左右宽度,最大限度利用头部有限的空间,保证本装置可以在微创手术中使用。
25.(2)通过前部支撑件和后部支撑件与上、下撑开片中部铰接的设计,使得上、下撑开片可以在撑开过程中根据椎间隙两侧终板的实际角度进行自适应调整,自然地贴合椎体终板,使得撑开过程中椎体终板均匀受力,有效的减小终板损伤,降低手术风险。
26.(3)本发明中只有外管和传动管两层管,由于固定外径要求为7mm,在该限制下,更少层数的管子可增加单层管壁厚,提高管件强度,增加装置强度,提高装置的稳定性。
27.(4)撑开单元固定在外管的远端,本发明撑开过程中最远端是固定不动的,远端距离固定,限制撑开时撑开片过度滑动,提高手术安全性。
28.(5)本发明中提供了控制手柄具体控制原理和具体结构,该结构更简单可靠。
29.(6)本发明中上、下撑开片设置有多组支撑组件,能简单有效的达到撑开的目的,同时提供很强的撑开力,轻松的撑开椎体。
30.(7)本发明通过显影槽的设置可以反应插入椎体深度,通过手柄座上的刻度测量撑开高度,因此本发明具有试模的功能。
附图说明
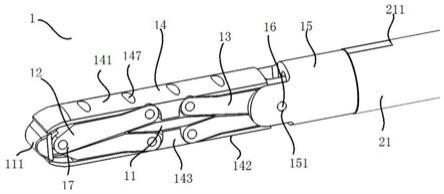
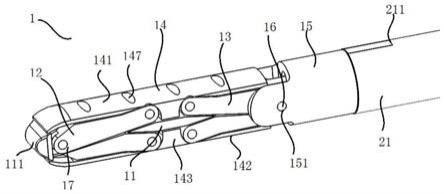
31.图1为本发明中一种自适应椎体的微创撑开试模装置远端结构示意图;
32.图2为本发明中第一支撑杆结构示意图;
33.图3为本发明中第二支撑杆结构示意图;
34.图4为本发明中中间杆的结构示意图;
35.图5为本发明中上、下撑开片结构示意图;
36.图6为本发明中自适应椎体的微创撑开试模装置近端结构示意图;
37.图7为本发明中自适应椎体的微创撑开试模装置近端结构剖视图;
38.图8为本发明中撑开组件的近端与外管和传动管远端的组合示意图;
39.图9为本发明中撑开组件的近端与外管和传动管远端的组合剖面图;
40.图中标记表示说明:
[0041]1‑
撑开单元、11
‑
中间杆、111
‑
头部、112
‑
十字座、113
‑
通槽、114
‑
远端杆、115
‑
近端杆、116
‑
加强部、12
‑
前部支撑件、13
‑
后部支撑件、14
‑
撑开片、141
‑
上撑开片、142
‑
下撑开片、143
‑
加强座、144
‑
铰接孔、146
‑
加强肋、147
‑
显影槽、15
‑
推进座、151
‑
固定孔、16
‑
支杆、17
‑
支撑组件、171
‑
第一支撑件、172
‑
第二支撑件、173
‑
第一铰接孔、174
‑
第二铰接孔、
[0042]2‑
控制手柄、21
‑
外管、211
‑
固定槽、22
‑
传动管、23
‑
滑块、24
‑
手柄座、241
‑
滑槽、242
‑
外螺纹、25
‑
转动旋钮、251
‑
内螺纹、26
‑
旋钮盖。
具体实施方式
[0043]
在以下的描述中,近端指靠近操作者的一端,远端指远离操作者的一端。轴向为沿传动管中轴线延伸的方向,周向为以传动管中轴线为旋转中心的旋转方向。左右是指操作者视角的左右。
[0044]
本发明提供了一种自适应椎体的微创撑开试模装置,如图1和6中包括远端的撑开单元1和近端的控制手柄2。参照图1所示,撑开单元1包括中间杆11、前部支撑件12、后部支撑件13、撑开片14和推进座15。
[0045]
具体地,参照图1所示,上述前部支撑件12和后部支撑件13分别包括两组支撑组件17。支撑组件17包括一端铰接的第一支撑杆171和第二支撑杆172,第一支撑杆171和第二支撑杆172的结构呈镜像对称,第一支撑杆171和第二支撑杆172相对的一侧上设有阶梯槽,使得第一支撑杆171和第二支撑杆172一端铰接后形成的支撑组件17整体宽度相同。第一支撑杆171和第二支撑杆172的两端分别设有第一铰接孔173和第二铰接孔174,第一支撑杆171和第二支撑杆172的第一铰接孔173相互铰接,另一端的第二铰接孔174分别与上撑开片141
和下撑开片142中部的远端铰接孔144铰接或分别与上撑开片141和下撑开片142中部的近端铰接孔145铰接。
[0046]
进一步地,前部支撑件12包括的支撑组件17的两第二铰接孔174分别与上撑开片141和下撑开片142中部远端的铰接孔144铰接,后部支撑件13包括的支撑组件17的两第二铰接孔174分别与上撑开片141和下撑开片142中部近端的铰接孔144铰接。其中,后部支撑件13中的支撑组件17的第一铰接孔173、中间杆11近端设置的通槽113与推进座15远端的固定孔151三者铰接,推进座15和后部支撑件13的近端可以沿通槽113进行轴向滑动。
[0047]
在一种优选的实施方式中,支杆16穿过后部支撑件13的支撑组件17的第一铰接孔173与推进座15远端的固定孔151形成的铰接部位后,穿过中间杆11近端设置的通槽113,穿入中间杆11另一侧后部支撑件13与推进座15的铰接部位,通过支杆16的设置使得推进座15相对中间杆11运动时,保证铰接处的强度。
[0048]
在本发明一种具体的实施方式中,参照图4所示,中间杆11的远端设有头部111,头部111为由远及近逐渐变大的锥体,该锥体的远端面为圆弧面,中间杆11的中部为与加强座143相配合的十字座112,十字座112的远端面沿远端方向延伸出远端杆114,远端杆114的另一端与所述头部11的近端面固定,十字座112的近端面沿近端方向延伸出近端杆115,近端杆115的另一端插入外管21远端的固定槽211,近端杆115设有通槽113。
[0049]
进一步地,在十字座112中部,垂直于轴向的部位的近端侧和远端侧分别沿远离十字座112的方向延伸出加强部116,加强部116与近端杆115和远端杆114的左右两侧固定,从而增加中间杆11整体强度。
[0050]
在本发明一种具体的实施方式中,撑开片14包括结构相同的上撑开片141和下撑开片142,参照图5所示,撑开片14中部设有十字型的加强座143,加强座143的近端和远端分别向远离加强座143的方向延伸出加强肋146,加强座143的远端和近端分别设有铰接孔144,所述前部支撑件12与远端的所述铰接孔144铰接,所述后部支撑件13与近端的所述铰接孔144铰接。
[0051]
进一步地,撑开片14远端向设有加强肋146的一侧弯曲一定弧度,即向靠近中间杆11的方向弯曲一定弧度。更进一步地,如图1中,靠拢中间杆11的头部111的上撑开片141和下撑开片142最远端要远于头部111的最高处,且上撑开片141和下撑开片142最远端最小宽度要小于头部111最高处高度。通过上述设计,使得在上撑开片141和下撑开片142闭合状态时,头部111可以防止组织碎片卡入前部缝隙使头部111呈密封状态。
[0052]
具体地,参照图6中所示,上述控制手柄2包括外管21、传动管22、滑块23、手柄座24、转动旋钮25和旋钮盖26。其中,手柄座24、转动旋钮25和旋钮盖26组成操作组件。
[0053]
在本发明一种具体的实施方式中,传动管22套设于外管21内,外管21的远端与中间杆11的近端固定连接,传动管22的远端与推进座15固定连接,操作组件带动传动管22相对于外管沿轴向运动,传动管22带动推进座15相对于中间杆11沿轴向运动。
[0054]
进一步地,参照图8中所示,中间杆11的近端插入外管21远端的固定槽211,中间杆11的近端与外管21的远端之间的通孔,传动管22的远端中部开槽后穿过该通孔与推进座15固定连接,传动管22带动推进座15相对外管21和中间杆11沿轴向运动。
[0055]
参见图7所示,外管21的近端与手柄座24的远端固定连接,传动管22的近端与滑块23固定连接,滑块23位于手柄座24内,手柄座24两侧对称设有滑槽241,滑块23的两侧分别
延伸出两凸起,两凸起穿过滑槽241,实现所述滑块23与手柄座24周向限位轴向可滑动连接,手柄座241尾端设有外螺纹242,外螺纹242与转动旋钮25的内螺纹251配合,转动旋钮25与旋钮盖26轴向限位径向可旋转固定,滑块23的凸起穿过滑槽241后被卡在转动旋钮25与旋钮盖26装配后形成的空腔内(所述转动旋钮25远端与旋钮盖26远端形成的空腔)。
[0056]
一种优选地实施方式中,如图1中,撑开片14与椎体终板接触的一侧上设有圆弧形显影槽147用于显影,手术时,x光照射到撑开片14与椎体终板接触面,显影槽147显影,显影槽147设置为距离已知,通过显影槽147与椎体的相对位置推断椎体深度。如图7中,手柄座24上设有刻度,用于标记转动旋钮25和旋钮盖26的位移变化,推断出撑开片14的撑开高度,达到测量椎体撑开高度的目的。综上,本发明通过显影槽的设置可以反应插入椎体深度,通过手柄座上的刻度测量撑开高度,具有试模的功能。
[0057]
本发明提供的自适应椎体的微创撑开试模装置的具体操作步骤如下:
[0058]
步骤s1:正向旋转转动旋钮25,转动旋钮25的内螺纹251与手柄座24外螺纹242配合,使转动旋钮25向远端转动,推着滑块23向远端运动,滑块23带着与滑块23固定的传动管22向远端运动,传动管22推着与传动管22固定的推进座15向远端运动,推进座15推着后部支撑件13的近端向远端移动,使得所有支撑组件17撑开,实现上撑开片141和下撑开片142的撑开。
[0059]
步骤s2:反向旋转转动旋钮25,转动旋钮25的内螺纹251与手柄座24外螺纹242配合,使转动旋钮25带着与转动旋钮25固定的旋钮盖26向近端转动,旋钮盖26拉着滑块23向近端运动,滑块23带着与滑块23固定的传动管22向近端运动,传动管22推着与传动管23固定的推进座15向近端运动,推进座15拉着后部支撑件13的近端向近端移动,使得所有支撑组件17闭合,实现上撑开片141和下撑开片142的闭合。
[0060]
以上对本发明的具体实施例进行了详细描述,但其只是作为范例,本发明并不限制于以上描述的具体实施例。对于本领域技术人员而言,任何对本发明进行的等同修改和替代也都在本发明的范畴之中。因此,在不脱离本发明的精神和范围下所作的均等变换和修改,都应涵盖在本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。