1.本发明涉及机械传动领域,尤其涉及一种基于空间共轭曲线啮合的,轻量化的线齿轮机构。
背景技术:
2.在机械、汽车、玩具等行业,变速器的应用十分广泛,变速器的主要功能是改变传动比,实现从输入轴到输出轴的不同速度和扭矩传递的功能。
3.齿轮变速器具有传动稳定、传动效率高、可靠性好、结构紧凑等优点,是应用最广泛的变速器之一。
4.在齿轮变速器中,齿轮副是齿轮变速器的核心零部件。
5.在齿轮副传动中,能在有限空间内获得大传动比或者在给定传动比下减少齿轮副体积,属于齿轮轻量化设计。齿轮轻量化是齿轮的重要发展方向之一。
6.轻量型齿轮副广泛用于各类齿轮减速器,应用于机械、汽车,玩具、电动工具等各类机电产品。
7.结构轻量化是齿轮轻量化设计的主要方向。
8.齿轮的结构轻量化主要包括两个发展方向:一方面减少齿轮尺寸和体积;另一方面将减速器设计为特定传动系如少齿差行星齿轮减速器和谐波齿轮减速器等。另外,降低齿轮模数和变位齿轮设计,可以获得尺寸小的渐开线齿轮。
9.线齿轮是一种运用空间曲线啮合理论代替传统空间曲面啮合理论的新型齿轮,主要运用于微小传动领域,具有尺寸小,传动比大,制造方便等优点。线齿轮目前可以运用于垂直轴、相交轴和交错轴上的传动,并且其设计方程、重合度、强度准则、微小变速器和制造领域等研究已经趋于完善,其最少齿数可以是1。
10.在尺度受限的微小减速器装置中,有齿轮副轻量化设计的要求。
11.对于传统的渐开线齿轮,单级渐开线齿轮副的传动比过大,大齿轮的尺寸大;多级齿轮减速器的变速级数越多则零件数量越多;少齿差行星齿轮减速器和谐波齿轮减速器的结构复杂,内齿轮加工难度大。
12.由渐开线齿轮组装成的渐开线齿轮减速器,在轻量化设计的过程中,存在一些限制。传统的渐开线齿轮减速器的齿轮数量多,单个渐开线齿轮的齿数多,小模数齿轮和内齿轮的加工难度大,限制了渐开线齿轮副的轻量化设计。
技术实现要素:
13.本发明在线齿轮理论基础之上,给出一种轻量型平行轴线齿轮副的设计方案,用该方法设计的线齿轮副机构可以在有限空间内实现单级齿轮副大传动比的传动。
14.本发明所采用的技术方案如下。
15.一种轻量型平行轴线齿轮副机构,该机构由一对轻量型平行轴线齿轮副组成,轻量型平行轴线齿轮副由一个主动线齿轮和一个从动线齿轮组成,主动线齿轮和从动线齿轮
均由线齿轮轮体和线齿构成。
16.进一步地,所述轻量型平行轴线齿轮副的线齿的接触线为点接触啮合,线齿的接触线根据空间共轭曲线啮合理论设计。
17.进一步地,所述的轻量型平行轴线齿轮副的主动接触线和从动接触线为等螺距圆柱螺旋线,线齿轮副的传动比等于从动接触线的螺距值除以主动接触线的螺距值。
18.进一步地,所述的轻量型平行轴线齿轮副的主动线齿轮和从动线齿轮的接触线的螺旋半径与齿轮副的传动比无关系,相同外径尺寸的不同线齿轮副具有不同的传动比。
19.进一步地,所述的轻量型平行轴线齿轮副的线齿轮的外径在被给定的情况下,仍然可以对轻量型平行轴线齿轮副的传动比进行设计,可以在有限空间内实现大传动比传动。
20.进一步地,对所述的轻量型平行轴线齿轮副的两条接触线进行设计,对于给定传动比的一对线齿轮副,所设计的主动接触线的螺旋升角越小,线齿轮副的压力角越大,当压力角大于所选齿轮材料的压力角的最大值时,齿轮副可以实现自锁的功能。
21.进一步地,所述线齿轮副的主动线齿和从动线齿的厚度都进行设计,实现线齿轮副正反转无侧隙的功能。
22.进一步地,所述的轻量型平行轴线齿轮副的线齿绕齿轮轴线等圆周分布,每个线齿的大小一致。
23.进一步地,所述的轻量型平行轴线齿轮副可以在给定空间内进行设计;具体地,如附图4和附图5所示,在主动线齿轮和从动线齿轮的外径尺寸给定的条件下,主动线齿和从动线齿上的接触线还可以进行设计,实现不同的传动比的功能。
24.进一步地,所述的轻量型平行轴线齿轮副组成多级齿轮副,装配成轻量型平行轴线齿轮减速器。
25.进一步地,所述的轻量型平行轴线齿轮副具有固定的滑动率,有利于形成稳定的润滑条件。
26.进一步地,主动轮与驱动器联接以提供输入,主动轮上的线齿有一条或多条,呈现圆周阵列分布;主动轮的线齿和从动轮的线齿通过点接触啮合;从动轮与输出端联接以提供运动或力的输出,从动轮上的线齿线齿有多条,呈现圆周阵列分布。
27.进一步地,上述轻量型平行轴线齿轮副机构中,主动轮的线齿上用于啮合的接触线为空间等螺距圆柱螺旋线;从动轮的线齿上用于啮合的接触线为空间等螺距圆柱螺旋线。轻量型平行轴线齿轮副的传动比等于从动接触线的螺距值除以主动接触线的螺距值。
28.进一步地,上述轻量型平行轴线齿轮副机构中,主动轮的线齿为圆周分布;从动轮的线齿为圆周分布。
29.进一步地,上述轻量型平行轴线齿轮副机构中,线齿轮副的传动比等于参与啮合的从动轮的线齿数量除以主动轮的线齿数量。
30.进一步地,上述轻量型平行轴线齿轮副机构的主动接触线和从动接触线的空间坐标关系如下。
31.上述轻量型平行轴线齿轮副机构中,o0‑
x0y0z0、o
p
‑
x
p
y
p
z
p
为两个空间笛卡尔直角坐标系,平面xoz与平面x
p
o
p
z
p
在同一平面内,o
p
点到z0轴的距离为a,空间笛卡尔坐标系o1‑
x1y1z1与主动轮固联,空间笛卡尔坐标系o2‑
x2y2z2与从动轮固联,曲线a为主动接触线,曲线
b为从动接触线。在任意时刻,原点o1与o0重合,z1轴与z0轴重合,原点o2与o
p
重合,z2轴与z
p
轴重合。啮合开始后,主动轮以匀角速度绕z0轴旋转,角速度方向为z0轴负方向,主动轮转过的角度为从动轮以匀角速度绕z
p
轴旋转,角速度方向为z
p
轴正方向,从动轮转过的角度为匀速转动的线齿轮副,其传动比为i,其值等于
32.上述轻量型平行轴线齿轮副机构中,主动线齿轮的接触线的方程在自身坐标系下的表达方式为:
33.主动接触线在坐标系o1‑
x1y1z1上的方程为:
[0034][0035]
上述轻量型平行轴线齿轮副机构中,从动线齿轮的接触线的方程在自身坐标系下的表达方式为:
[0036]
从动接触线在坐标系o2‑
x2y2z2上的方程为:
[0037][0038]
上述轻量型平行轴线齿轮副机构中,在主动接触线和从动接触线的方程表达式中,t是参数变量,a是线齿轮副中心距,m为主动接触线螺旋半径,n为螺旋线螺距相关参数,i为线齿轮副传动比。
[0039]
上述轻量型平行轴线齿轮副机构中,主动接触线的螺旋半径为m,从动接触线的螺旋半径为(a
‑
m),线齿轮副的中心距为a。
[0040]
上述轻量型平行轴线齿轮副机构中,主动接触线的螺距值为2nπ,从动接触线的螺距值为2nπi,线齿轮副的传动比为i。
[0041]
所述轻量型平行轴线齿轮副的传动比与主动接触线的螺距值和从动接触线的螺距值直接相关,传动比等于从动接触线的螺距值除以主动接触线的螺距值。
[0042]
所述轻量型平行轴线齿轮副的传动比与主动接触线的螺旋半径和从动接触线的螺旋半径无关。
[0043]
所述轻量型平行轴线齿轮副的传动比与主动线齿轮的外径尺寸和从动线齿轮的外径尺寸无关。
[0044]
本发明的轻量型平行轴线齿轮副机构的两条接触线的方程不限于上述表达方式。
[0045]
本发明的轻量型平行轴线齿轮副机构的两条接触线可以进行设计,不同的接触线之间存在不同的压力角,可以获得齿轮副自锁的功能。
[0046]
本发明的轻量型平行轴线齿轮副机构的线齿部分无特定形状,可以进行设计,实现齿轮副正反转无侧隙传动。
[0047]
本发明的轻量型平行轴线齿轮副机构,主动接触线和从动接触线为两条等螺距空间圆柱螺旋线,所述的轻量型平行轴线齿轮副具有固定的滑动率,有利于形成稳定的润滑条件。
[0048]
线齿轮任意空间共轭曲线的滑动率如下分析。
[0049]
设任意一对共轭曲线表达式为:γ1:r
(1)
=r
(1)
(t),γ2:r
(2)
=r
(2)
(t),它们在某个瞬间相切于m点。经过时间δt后,曲线γ1上的m1与曲线γ2上的m2相切接触。设接触点在γ1、γ2滑过的弧长分别为s1和s2,弦长分别为|δr
(1)
|和|δr
(2)
|。
[0050]
显然有:
[0051]
共轭曲线的滑动率定义为两曲线滑过的相对弧长差与该曲线滑过的全弧长之比的极限值。
[0052]
若以γ1为例,其滑动率记为σ1:
[0053][0054]
同理,曲线γ2的滑动率为σ2:
[0055][0056]
曲线γ1和γ2的相对滑动的方向可以通过上述滑动率σ1和滑动率σ2判断。例如,当σ1>0时,s1>s2,表示曲线γ2相对γ1滑动的方向是由m到m2,即与接触点在γ1上移动的方向是一致的;反之,当σ1<0时,s1<s2,曲线γ2相对γ1滑动的方向与接触点在γ1上移动的方向是相反。
[0057]
下面结合本发明的轻量型平行轴线齿轮副机构的接触线的方程分析轻量型平行轴线齿轮副的滑动率问题。
[0058]
上述轻量型平行轴线齿轮副机构中,主动线齿轮的接触线的方程在自身坐标系下的表达方式为:
[0059]
主动接触线在坐标系o1‑
x1y1z1上的方程为:
[0060][0061]
上述轻量型平行轴线齿轮副机构中,从动线齿轮的接触线的方程在自身坐标系下的表达方式为:
[0062]
从动接触线在坐标系o2‑
x2y2z2上的方程为:
[0063][0064]
上述轻量型平行轴线齿轮副机构中,在主动接触线和从动接触线的方程表达式中,t是参数变量,a是线齿轮副中心距,m为主动接触线螺旋半径,n为螺旋线螺距相关参数,i为线齿轮副传动比。
[0065]
线齿轮旋转一转时,主动接触线参与啮合的接触线的长度记为l1:
[0066][0067]
其中p1代表主动接触线螺距,c1代表主动接触线螺旋圆周长。
[0068]
p1=2πn
[0069]
c1=πd1[0070]
其中d1代表主动接触线螺旋直径。
[0071]
d1=2m
[0072]
同理,从动接触线参与啮合的接触线的长度长度记为l2:
[0073][0074]
其中p2代表主动接触线螺距,c2代表主动接触线螺旋圆周长。
[0075]
p2=2πni
[0076]
c2=πd2[0077]
其中d1代表主动接触线螺旋直径。
[0078]
d2=2(a
‑
m)
[0079]
主动接触线的滑动率记为σ1:
[0080][0081]
同理,从动接触线的滑动率为σ2:
[0082][0083]
上述滑动率计算公式即为轻量型平行轴线齿轮副的滑动率计算公式。所述轻量型平行轴线齿轮副具有固定的滑动率,有利于形成稳定的润滑条件。
[0084]
根据权利要求3所创建的线齿轮副方程都可以运用于轻量型平行轴线齿轮副机构中。
[0085]
本机构得到主动轮和从动轮上的线齿是以等螺距圆柱螺旋线为基础设计的,可有一条或多条线齿;主动轮的线齿和从动轮的线齿通过点接触啮合;主动轮与输入端连接,从动轮与输出端联接以提供运动或力的输出;主动轮和从动轮上的接触线半径与齿轮副传动比无关,齿轮副传动比等于从动接触线的螺距值除以主动接触线的螺距值,也等于参与啮合的从动轮的线齿数量除以主动轮的线齿数量。
[0086]
本发明的原理为:根据线齿轮空间共轭曲线啮合理论,可以设计出主动轮和从动轮的外径尺寸与齿轮副传动比无关的线齿接触线方程,使其稳定啮合,并可以在有限空间内设计大传动比的齿轮副。
[0087]
本发明与现有技术相比具有如下的优点:
[0088]
1.主动轮和从动轮上的外径尺寸与齿轮副传动比无关,可以在有限空间内设计大传动比的齿轮副和减速器,质量体积相比传统渐开线齿轮更小,适用于微小型机电产品。
[0089]
2.齿轮副传动比等于从动接触线的螺距值除以主动接触线的螺距值,只需要保证
接触线的螺距值精确,就可以获得传动比精确的线齿轮副,设计简单。
[0090]
3.齿轮最少齿数少,最少为1,可以获得齿轮齿数少的齿轮,且单个齿轮副传动比大,与传统渐开线齿轮副相比,既可以减少齿轮齿数,又可以减少齿轮数量,加工方便。
[0091]
4.齿轮副的主动接触线和从动接触线可以经过设计,实现齿轮副的自锁。
[0092]
5.齿轮副的主动接触线和从动接触线为等螺距圆柱螺旋线,齿轮副具有固定不变的滑动率,有利于形成稳定的润滑条件。
[0093]
本发明的轻量型平行轴线齿轮副机构能够提供小体积大传动比的传动,是一种设计和加工简便的齿轮副。
附图说明
[0094]
图1为本发明的机构的坐标体系。
[0095]
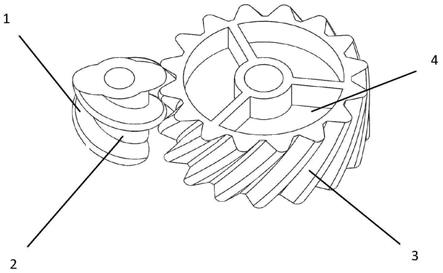
图2为本发明的一种实施例,为一种传动比为8的轻量型平行轴线齿轮副,包括主动轮和从动轮;其中1为主动线齿轮线齿,2为主动线齿轮轮体,3为从动线齿轮线齿,4为从动线齿轮轮体。
[0096]
图3为本发明的一种实施例,为一种传动比为6的轻量型平行轴线齿轮副,包括主动轮和从动轮。
[0097]
图4为本发明的一种实施例,为一种传动比为2的轻量型平行轴线齿轮副,包括主动轮和从动轮。
[0098]
图5为本发明的一种实施例,为一种传动比为1的轻量型平行轴线齿轮副,包括主动轮和从动轮。
[0099]
图6为本发明的一种实施例,为一种轻量型平行轴线齿轮减速器,包括两级轻量型平行轴线齿轮副、轴承和齿轮箱箱体。
[0100]
图7为本发明的线齿实体的生成方法。
[0101]
图8为本发明的一种轻量型平行轴线齿轮副的主动接触线和从动接触线的滑动率的研究示意图。
具体实施方式
[0102]
下面结合附图对本发明作进一步说明,但本发明的实施方式不限于此。
[0103]
本发明所述轻量型平行轴线齿轮副包含了主动轮和从动轮,主动轮和从动轮的坐标体系如图1所示,用于建立线齿轮的线齿的接触线方程。如图1所示,o0‑
x0y0z0、o
p
‑
x
p
y
p
z
p
为两个空间笛卡尔直角坐标系,平面xoz与平面x
p
o
p
z
p
在同一平面内,o
p
点到z0轴的距离为a,空间笛卡尔坐标系o1‑
x1y1z1与主动轮固联,空间笛卡尔坐标系o2‑
x2y2z2与从动轮固联,曲线a为主动接触线,曲线b为从动接触线,传动时主动轮和从动轮各自绕着z轴和z
p
轴转动。
[0104]
轻量型平行轴线齿轮副如图2所示,左边为主动轮1,主动轮上有从动轮线齿2,右边为从动轮3,从动轮上有从动轮线齿4。主动轮和从动轮上的接触线均为等螺距圆柱螺旋线,主动接触线和从动接触线在各自坐标系下的方程分别如下:
[0105]
主动接触线在坐标系o1‑
x1y1z1上的方程为:
[0106][0107]
从动接触线在坐标系o2‑
x2y2z2上的方程为:
[0108][0109]
其中,t是参数变量,a是线齿轮副中心距,m为主动接触线螺旋半径,n为螺旋线螺距相关参数,i为线齿轮副传动比。
[0110]
本发明所述主动轮和从动轮上的接触线的方程为等螺距圆柱螺旋线的一种表达方式,但是本发明实施方式不限于此。
[0111]
一种轻量型平行轴线齿轮副机构的主动轮和从动轮均包括多条线齿,线齿实体只需要能够满足强度要求,线齿实体本身并没有特别具体的形状要求。如图4所示,在每一个啮合点处,分别在主、从动线齿接触方向的一侧向外伸展出一定的体积,即可以生成所需的线齿。轮体用于将线齿固联起来。
[0112]
1.实施例1:
[0113]
如图2所示的一种轻量型平行轴线齿轮副机构,为本发明的一种实施例。
[0114]
实施例1为一种轻量型平行轴线齿轮副,其中主动线齿轮齿数为2,从动线齿轮齿数为16,线齿的法向齿廓为圆角等边三角形,圆角直径为1mm,三角形高为2.5mm。
[0115]
实施例1的主动接触线和从动接触线在各自坐标系下的方程分别如下。
[0116]
主动接触线在自身坐标系下的方程为:
[0117][0118]
从动接触线在自身系下的方程为:
[0119][0120]
实施例1的传动比为8。
[0121]
2.实施例2:
[0122]
如图3所示的一种轻量型平行轴线齿轮副机构,为本发明的一种实施例。
[0123]
实施例2为一种轻量型平行轴线齿轮副,其中主动线齿轮齿数为2,从动线齿轮齿数为14,线齿的法向齿廓为圆角直径为1mm的直角三角形,其中三角形的直角朝向齿轮外,三角形高为1.5mm。
[0124]
实施例2的主动接触线和从动接触线在各自坐标系下的方程分别如下。
[0125]
主动接触线在自身坐标系下的方程为:
[0126][0127]
从动接触线在自身系下的方程为:
[0128][0129]
实施例2的传动比为7。
[0130]
3.实施例3:
[0131]
如图4所示的一种轻量型平行轴线齿轮副机构,为本发明的一种实施例。
[0132]
实施例3为一种轻量型平行轴线齿轮副,其中主动线齿轮齿数为2,从动线齿轮齿数为2,线齿的法向齿廓为圆形,圆直径为2mm。同时参与啮合的主动线齿轮的齿数为1,同时参与啮合的从动轮的齿数为2。
[0133]
实施例3的主动接触线和从动接触线在各自坐标系下的方程分别如下。
[0134]
主动接触线在自身坐标系下的方程为:
[0135][0136]
从动接触线在自身系下的方程为:
[0137][0138]
实施例3的传动比为2。
[0139]
4.实施例4:
[0140]
如图5所示的一种轻量型平行轴线齿轮副机构,为本发明的一种实施例。
[0141]
实施例4为一种轻量型平行轴线齿轮副,其中主动线齿轮齿数为2,从动线齿轮齿数为2,线齿的法向齿廓为圆形,圆直径为2mm。同时参与啮合的主动线齿轮的齿数为2,同时参与啮合的从动轮的齿数为2。
[0142]
实施例4的主动接触线和从动接触线在各自坐标系下的方程分别如下。
[0143]
主动接触线在自身坐标系下的方程为:
[0144]
[0145]
从动接触线在自身系下的方程为:
[0146][0147]
实施例4的传动比为1。
[0148]
5.实施例5:
[0149]
如图6所示的一种轻量型平行轴线齿轮减速器,为本发明的一种实施例。
[0150]
实施例5为一种轻量型平行轴线齿轮减速器,包括两级轻量型平行轴线齿轮副,其中两级轻量型平行轴线齿轮副相同。每级轻量型平行轴线齿轮副中,主动线齿轮齿数为2,从动线齿轮齿数为16,线齿的法向齿廓为圆角等边三角形,圆角直径为1mm,三角形高为2.5mm。
[0151]
每级轻量型平行轴线齿轮副中的主动接触线和从动接触线在各自坐标系下的方程分别如下。
[0152]
主动接触线在自身坐标系下的方程为:
[0153][0154]
从动接触线在自身系下的方程为:
[0155][0156]
实施例5的传动比为64。
[0157]
实施例5为一种传动比为64的轻量型平行轴线齿轮减速器,由两级轻量型平行轴线齿轮副、轴承以及齿轮箱组成。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
