1.本发明涉及风险评估方法及系统,尤其涉及一种危化品车辆公路行驶风险评估方法及系统。
背景技术:
2.危化品作为生活必需品的原材料常需要进行异地运输,而高速公路为危化品车辆主要运输途径。其中驾驶员、危化品车辆、公路,三方面因素为其发生危险的主要风险源,与传统运货车不同,危化品车辆运输中一旦发生事故后果不堪设想,甚至威胁人的生命,但现有技术中无法对危化品运输过程中存在的风险进行有效评估和预警。现有技术中往往只单纯对车辆某一行使工况进行预警,不够全面,且传统评估方案只考虑事故静态因素,不能对危化品车辆行使中的风险进行实时评估。
技术实现要素:
3.发明目的:本发明的目的是提供一种能够对运输事故发生作出预警的危化品车辆公路行驶风险评估方法。
4.技术方案:本发明所述的危化品车辆公路行驶风险评估方法包括如下步骤:
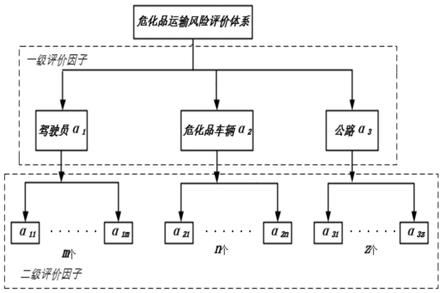
5.(1)用层次分析法建立危化品车辆公路运输风险评估体系,确定一级评估因子以及各一级评估因子下的二级评估因子;
6.(2构建表述评价结果的风险集中间值v
k
,其中k=1,2,3;评分取值区间为[0,1];用专家评分法对各个因子危险度进行评分;
[0007]
(3)建立二级因子隶属度风险评判矩阵;
[0008]
(4)基于隶属度风险评判矩阵建立基于熵权法的危化品运输一级评估因子和二级评估因子的权重模糊集;
[0009]
(5)根据一级评估因子和二级评估因子的权重模糊集构建评价模糊集,对两级影响因子进行逐级模糊评价,得出危化品运输评估等级。
[0010]
所述一级评估因子包括驾驶员α1、危化品车辆α2和公路α3。
[0011]
所述步骤(3)中,一级评估因子α
i
,i=1,2,3所对应的隶属度风险评判矩阵a
i
为
[0012][0013]
其中ω
ijk
为二级评估因子对取值区间的隶属度,j=1,2,
···
,m;k=1,2,3;其值按下式计算:
[0014][0015]
其中a
s
×
n
为二级评估因子的模糊集中的元素由专家评分得出,且其取值区间为[0,
1],s为专家数,n为二级评估因子的个数。
[0016]
所述步骤(4)包括如下步骤:
[0017]
(41)将风险评判矩阵a
i
进行线性变换得到矩阵b
i
,b
i
中单个元素为其表达式如下:
[0018][0019]
(42)按下式计算因子的熵值q
ij
:
[0020][0021]
其中,k为玻尔兹曼常数;
[0022]
(43)对二级评估因子的权重w
ij
赋值,表达式如下:
[0023][0024]
(44)建立二级因子权重模糊集,其表达式如下:
[0025][0026]
其中m,n,z代表各个一级因子所对应的二级因子权重值个数;
[0027]
(45)构建一级因子权重模糊集,表达式如下:
[0028]
u=[u
1 u
2 u3]。
[0029]
所述步骤(5)包括如下步骤:
[0030]
(51)基于危化品运输模糊评估模型建立一级评价因子α1对应的各个二级评价因子α
ij
初级模糊评价模型,其表达式如下:
[0031][0032]
其中e
i
代表各一级影响因子下各个二级因子所占权重,i=1,2,3;
[0033]
(52)建立各个二级因子的评价模型,表达式如下:
[0034][0035]
(53)建立各个一级影响因子评价模型,表达式如下:
[0036][0037]
其中e1…
;u
1 u
2 u3表示各个一级评价因子权重值,其和为1;
[0038]
(54)计算危化品车辆公路运输评价指标的风险评估值,并风险度区间进行形式危
险等级的评级,其中,风险评估值按下式计算:
[0039][0040]
本发明所述的危化品车辆公路形式风险评估系统包括如下模块:
[0041]
风险源信息提取模块:以人、车、路为风险源,用专家评分法进行风险评价,存储各个路段的事故信息,作为影响风险评估的静态因素的评价模糊数值,所述静态因素包括危化品等级、道路交通量、道路弯道并根据每年事故信息实时添加;确定危化品车辆行使的路段之后,在数据库中提取出事故信息,获得隶属于一级评估因子危化品车辆α2和公路α3的二级评估因子的模糊数值;
[0042]
动态评估因素识别模块:在危化品车辆行使过程中,对影响风险评估的动态因素进行识别,获得隶属于一级评估因子驾驶员α1、危化品车辆α2的二级评估因子的模糊数值;
[0043]
数据预处理模块:将获得事故段信息进行加工处理,构建评判矩阵;
[0044]
权重计算模块:利用构建的评判矩阵求出各个危险源的权重数值;
[0045]
行驶风险评估模块:对风险综合评价值进行风险度识别,确定风险种类;
[0046]
所述各模块之间通讯连接。
[0047]
所述动态评估因素识别模块包括用于判别驾驶员是否疲劳驾驶的眼球运动识别装置和用于接收实时天气变化和车辆运行轨迹的gps接收装置以及各车载传感器,当出现疲劳驾驶或天气变化以及违规行使时将模糊数值定义为v1。
[0048]
所述车载传感器用于监测危化品车辆行使中自身的风险,包括用于判断危化品是否泄露的液位传感器、用于判断轮胎是否失压的胎压传感器、判断转向是否平顺的方向盘转角传感器,上述传感器将测得数据转变为电信号通过车载can总线传输至系统,当判断危化品车辆自身存在危险时将模糊数值定义为v1。
[0049]
有益效果:与现有技术相比,本发明具有如下显著优点:评估影响因子设置全面,预留了二级评估因子,可根据实际情况添加二级评价因子,评估模型灵活性和普适性强,能对危化品事故发生的征兆进行提前预警,降低事故发生的可能性。相对于只考虑静态评估因子的传统技术方案,本发明同时考虑动态评估因子,可以在危化品车辆行使途中实时进行风险评估,提升危化品运输过程的安全性。
附图说明
[0050]
图1为本发明的危化品运输风险评估体系结构图;
[0051]
图2为本发明的危化品运输风险评估系统结构示意图。
具体实施方式
[0052]
下面结合附图对本发明的技术方案作进一步说明。
[0053]
本发明所述的危化品运输风险评估体系如图1所示,评估方法包括如下步骤:
[0054]
(1)采集路段事故信息,用层次分析法建立危化品车辆公路运输风险评估体系,确定一级评估因子以及隶属于各一级评估因子的二级评估因子。
[0055]
一级评估因子包括驾驶员α1、危化品车辆α2和公路α3,隶属于驾驶员α1的二级评估
因子包括疲劳驾驶、操作不当、违规驾驶;隶属于危化品车辆α2的二级评估因子包括危化品等级、制动不良、机械零部件损失;隶属于公路α3的二级评估因子包括道路交通量、天气变化、路段信息;为增强系统的灵活性,各一级评估因子下设的二级评估因子可根据实际需求增减。
[0056]
(2)分析所识别的路段事故信息即事故发生数量和造成的经济损失,结合专家评分法对其危险度进行评分,构建表述评价结果的风险集v
k
并确定其中间值,其中k=1,2,3,评分取值区间为[0,1],如下表所示:
[0057]
表1风险度识别区间
[0058] 状态等级取值区间中间值v1危险[0.4,1]0.7v2较安全[0.2,0.40.3v3安全[0,0.20.1
[0059]
(3)建立二级评估因子的隶属度风险评判矩阵;
[0060]
各个二级评估因子的模糊集中单个元素表示为a
s
×
n
,其值由专家评分得出,取值区间为[0,1],s为专家数,n为二级评估因子的个数;
[0061]
计算各二级评估因子对取值区间的隶属度,j=1,2,
···
,m;k=1,2,3;如下式所示:
[0062][0063]
由此构建一级评估因子α
i
,i=1,2,3所对应的隶属度风险评判矩阵a
i
为
[0064][0065]
(4)基于隶属度风险评判矩阵建立基于熵权法的危化品运输一级评估因子和二级评估因子的权重模糊集,具体包括如下步骤:
[0066]
(41)将风险评判矩阵a
i
进行线性变换得到矩阵b
i
,b
i
中单个元素为其表达式如下:
[0067][0068]
(42)按下式计算因子的熵值q
ij
:
[0069][0070]
其中,k为玻尔兹曼常数;
[0071]
(43)对二级评估因子的权重w
ij
赋值,表达式如下:
[0072][0073]
(44)建立二级因子权重模糊集,其表达式如下:
[0074][0075]
其中m,n,z代表各个一级因子所对应的二级因子权重值个数;
[0076]
(45)构建一级因子权重模糊集,表达式如下:
[0077]
u=[u
1 u
2 u3]。
[0078]
(5)根据一级评估因子和二级评估因子的权重模糊集构建评价模糊集,对两级影响因子进行逐级模糊评价,得出危化品运输评估等级,具体步骤如下:
[0079]
(51)基于危化品运输模糊评估模型建立一级评价因子α1对应的各个二级评价因子α
ij
初级模糊评价模型,其表达式如下:
[0080][0081]
其中e
i
代表各一级影响因子下各个二级因子所占权重,i=1,2,3;
[0082]
(52)建立各个二级因子的评价模型,表达式如下:
[0083][0084]
(53)建立各个一级影响因子评价模型,表达式如下:
[0085][0086]
其中e1…
;u
1 u
2 u3表示各个一级评价因子权重值,其和为1;
[0087]
(54)计算危化品车辆公路运输评价指标的风险评估值,并风险度区间进行形式危险等级的评级,其中,风险评估值按下式计算:
[0088][0089]
如图2所示,本发明所述的危化品车辆公路行驶风险评估系统包括如下模块:
[0090]
风险源信息提取模块:以人、车、路为风险源,用专家评分法进行风险评价,存储各个路段的事故信息,作为影响风险评估的静态因素的评价模糊数值,所述静态因素包括危化品等级、道路交通量、道路弯道并根据每年事故信息实时添加;确定危化品车辆行使的路段之后,在数据库中提取出事故信息,获得隶属于一级评估因子危化品车辆α2和公路α3的二级评估因子的模糊数值;
[0091]
动态评估因素识别模块:在危化品车辆行使过程中,对影响风险评估的动态因素进行识别,获得隶属于一级评估因子驾驶员α1、危化品车辆α2的二级评估因子的模糊数值;
[0092]
数据预处理模块:将获得事故段信息进行加工处理,构建评判矩阵;
[0093]
权重计算模块:利用构建的评判矩阵求出各个危险源的权重数值;
[0094]
行驶风险评估模块:对风险综合评价值进行风险度识别,确定风险种类;
[0095]
所述各模块之间通讯连接。
[0096]
动态评估因素识别模块包括用于判别驾驶员是否疲劳驾驶的眼球运动识别装置和用于接收实时天气变化和车辆运行轨迹的gps接收装置以及各车载传感器,当出现疲劳驾驶或天气变化以及违规行使时将模糊数值定义为v1。
[0097]
所述车载传感器用于监测危化品车辆行使中自身的风险,包括用于判断危化品是否泄露的液位传感器、用于判断轮胎是否失压的胎压传感器、判断转向是否平顺的方向盘转角传感器,上述传感器将测得数据转变为电信号通过车载can总线传输至系统,当判断危化品车辆自身存在危险时将模糊数值定义为v1。
[0098]
本实施例中未详细描述的部分均可用常规技术实现,故不再详述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。