技术特征:
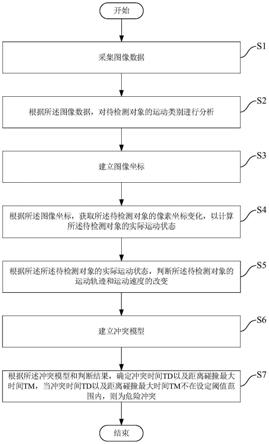
1.一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,包括:s1、采集图像数据;s2、根据所述图像数据,对待检测对象的运动类别进行分析;s3、建立图像坐标;s4、根据所述图像坐标,获取所述待检测对象的像素坐标变化,以计算所述待检测对象的实际运动状态;s5、根据所述所述待检测对象的实际运动状态,判断所述待检测对象的运动轨迹和运动速度的改变;s6、建立冲突模型;s7、根据所述冲突模型和判断结果,确定冲突时间td以及距离碰撞最大时间tm,当冲突时间td以及距离碰撞最大时间tm不在设定阈值范围内,则为危险冲突。2.根据权利要求1所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s2中的根据所述图像数据,对待检测对象的运动类别进行分析的步骤包括:s21、提取所述图像数据中的背景,以获取待检测对象的运动目标区域;s22、根据所述待检测对象的运动目标区域,以对待检测对象的运动类别进行分析。3.根据权利要求2所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s21中的提取所述图像数据中的背景,以获取待检测对象的运动目标区域的步骤包括:选取所述图像数据中的背景图像:|f
i
(x,y)
‑
f
i
‑1(x,y)|≤t(x,y),选取所述图像数据中的前景图像:|f
i
(x,y)
‑
f
i
‑1(x,y)|>t(x,y),其中,f
i
(x,y)为图像中第i帧(x,y)点的灰度值,t(x,y)为图像中第i帧(x,y)点的阈值,根据不同的背景来设定;b
i
(x,y)=(1
‑
g)b
i
‑1(x,y) f
i
(x,y)其中,b
i
(x,y)为图像中第i帧(x,y)点的背景模型,其中1
‑
g为更新频率;使用更新的背景模型b
i
(x,y)对当前帧进行背景差分,大于所述阈值的图像点,即为运动目标点,公式如下所示:|f
i
(x,y)
‑
f
i
‑1(x,y)|>t(x,y)∈运动目标对离散的运动点进行切割,以获得待检测对象的运动目标区域。4.根据权利要求2所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s22中的根据所述待检测对象的运动目标区域,以对待检测对象的运动类别进行分析的步骤包括:根据所述待检测对象的运动目标区域,采用几何特征方法对运动目标区域进行特征提取;从图像的重心点位置依次每隔45
°
取到图像边界的距离作为一个特征分量ri(i=1,2,3......8),其中r0作为单个目标的图像面积,r0和ri(i=1,2,3......8)九个特征量构成支持向量机分类识别的特征向量;将图像依次分类为行人、非机动车以及机动车,通过训练图像得到svm分类器。5.根据权利要求2所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s3中的建立图像坐标的步骤包括:
计算图像中的点在实际空间距离摄像机的水平距离x1以及垂直距离y1,y1=h
×
tan(α δθ)其中,β为水平视场角,iw为图像宽度,ih为图像高度,x0、y0为图像的坐标,x1为距离摄像机水平距离,y1为距离摄像机垂直距离,δθ为步进小角度,b1为每个y1实际水平距离;单位时间内的移动距离视为两帧之间坐标的直线距离δs,通过积分计算出短距离。6.根据权利要求1所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s6中的建立冲突模型的步骤包括:将行人及非机动车可视为质点,根据记录的待检测对象的运动轨迹,筛选存在的运动冲突点,对所述冲突点涉及的待检测对象进行分析;通过速度运行的夹角将所述冲突点分为正向交织即为α=180
°
,侧向交织即为0
°
<α<180
°
,同向追尾即为α=0
°
。7.根据权利要求1所述的一种基于交通冲突点的交通安全事故黑点识别方法,其特征在于,步骤s6中的建立冲突模型的步骤包括:设置待检测对象的冲突时间差td和距离碰撞最大时间tm;d1为机动车到达冲突点的距离,d2为非机动车(行人)到达冲突点的距离,l为机动车车身长度,v1为机动车的瞬时速度,v2为非机动车的瞬时车速;设置待检测对象的距离碰撞最大时间tm,tm=max(t1,t2)t1,t2为冲突双方维持当前的速度和轨迹行驶,到冲突点所需时间的最大值。8.一种基于交通冲突点的交通安全事故黑点识别系统,其特征在于,包括:摄像机,用于采集图像数据;分析模块,用于根据所述图像数据,对待检测对象的运动类别进行分析;图像坐标建立模块,用于建立图像坐标;
计算模块,用于根据所述图像坐标,获取所述待检测对象的像素坐标变化,以计算所述待检测对象的实际运动状态;第一判断模块,用于根据所述所述待检测对象的实际运动状态,判断所述待检测对象的运动轨迹和运动速度的改变;冲突模型建立模块,用于建立冲突模型;第二判断模块,用于根据所述冲突模型和判断结果,确定冲突时间td以及距离碰撞最大时间tm,当冲突时间td以及距离碰撞最大时间tm不在设定阈值范围内,则为危险冲突。9.一种电子设备,包括处理器和存储器,所述存储器存储有程序指令,其特征在于:所述处理器运行程序指令实现如权利要求1至权利要求7任一项所述的基于交通冲突点的交通安全事故黑点识别方法。
技术总结
本发明公开一种基于交通冲突点的交通安全事故黑点识别方法及系统。所述交通安全事故黑点识别方法包括:采集图像数据,根据所述图像数据,对待检测对象的运动类别进行分析,建立图像坐标,根据所述图像坐标,获取所述待检测对象的像素坐标变化,以计算所述待检测对象的实际运动状态,根据所述所述待检测对象的实际运动状态,判断所述待检测对象的运动轨迹和运动速度的改变,建立冲突模型,根据所述冲突模型和判断结果,确定冲突时间以及距离碰撞最大时间,当冲突时间以及距离碰撞最大时间不在设定阈值范围内,则为危险冲突。本发明可以充分认识交通冲突产生的机理,从而得出有针对性的冲突预防策略。的冲突预防策略。的冲突预防策略。
技术研发人员:王泽宁 韩昆
受保护的技术使用者:上海辉略企业发展集团有限公司
技术研发日:2021.09.06
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。