1.本发明涉及光电功能材料及其应用领域,具体涉及一种人工智能皮肤及其制备方法和应用。
背景技术:
2.皮肤是覆盖动物身体的柔软而有弹性的组织的外层。作为人体最大的感觉器官,皮肤可以为大脑提供有关自然环境的大量信息。模仿体感的人工智能皮肤有望扮演替代生物皮肤或虚拟现实中的传感和致动界面的角色。它已显示出在触觉设备,假肢,可穿戴医疗传感器,可植入医疗设备以及机器人的人造皮肤中的潜在适用性。最近的工作产生了能够检测感觉的电子皮肤,与人体皮肤相似,包括压力,温度,湿度和变形。但是,与真实皮肤不同,大多数已开发的电子皮肤在不同压力条件下均表现出对信号的相似响应,从而难以区分复杂的施加应力场。实际上,作为体感系统的重要功能,皮肤实时分辨具有不同方向和水平的应力(例如法向应力或剪切应力)的能力对于提供纹理和滑移信息是必不可少的。未来的人工智能(例如机器人)将需要此类反馈来执行一些琐碎的任务,例如拿着玻璃杯或将钥匙插入锁中。同时,具有这种能力的人工智能皮肤也将有助于建立先进的人机界面,并有益于我们对远程或虚拟对象的感知能力。因此,开发具有各向异性响应能力的人工智能皮肤,可以对不同方向的压力做出不同的响应,这是一个鼓舞人心且富有挑战性的研究课题。
3.到目前为止,有几种方法可以实时区分不同方向和级别的压力。一种典型的方法是基于复合导电膜制备人工智能皮肤,其中导电填料均匀分布而没有取向。导电填料之间的距离将根据施加的拉伸力或压缩力而变化,因此通过检测制备的复合导电膜的电阻信号,可以同时检测施加力的方向和大小。检测精度在很大程度上取决于导电填料的形态和在混合物中的分散性,因此不同批次的复合导电膜的性能可能彼此差异很大。通过精细的结构设计,可以实现使人工智能皮肤具有各向异性响应能力的另一种方法。人工智能皮肤模仿了山丘和真实皮肤的机械感受器,据报道,它能够实时测量和区分法向力和切向力。然而,装置的组装需要复杂的过程。因此,以简单,可靠的方式探索对不同方向力具有固有各向异性的人工智能皮肤不仅是必要的,而且也是极富挑战性的。
技术实现要素:
4.基于上述内容,本发明提供一种人工智能皮肤及其制备方法和应用。所述人工智能皮肤在不同方向力具有固有各向异性,可用于制备多种功能器件。
5.本发明的技术方案之一,一种人工智能皮肤,包括水凝胶电解质薄膜,设置在水凝胶电解质薄膜上方的电极材料a,设置在电极材料a上方的顶层绝缘保护材料,设置在水凝胶电解质薄膜下方的电极材料b,设置在电极材料b下方的顶层绝缘保护材料;
6.所述水凝胶电解质薄膜是基于一维光子晶体结构水凝胶,具有双重网络结构。
7.进一步地,所述顶层绝缘保护材料和底层绝缘保护材料相同或者不同,选自vhb胶带、塑料、橡胶和弹性体中的一种;所述电极材料a和电极材料b相同或者不同,选自惰性电
极或活性电极。
8.进一步地,所述水凝胶电解质薄膜由具有层状自组装能力的分子或聚合物自组装得到的层状结构作为第一种网络结构,以可聚合单体在层间聚合得到的三维网络结构作为第二种网络结构。
9.进一步地,所述水凝胶电解质薄膜的制备方法包括以下步骤:
10.(1)将表面活性剂、具有层状自组装能力的分子或聚合物、可聚合单体分散在水中,恒温搅拌得到均一的自组装前驱液;
11.(2)在该自组装前驱液中加入引发剂进行引发聚合得到水凝胶薄膜;
12.(3)将水凝胶薄膜浸泡在电解液中得到水凝胶电解质薄膜。
13.进一步地,所述步骤(1)中:
14.表面活性剂为阴离子型、阳离子型、两性离子型以及非离子型中的一种或多种;具体选自:油酸、硬脂酸、月桂酸、十二烷基硫酸钠、十六烷基硫酸钠、十八烷基硫酸钠、尔辛基琥珀酸磺酸钠、十二烷基苯磺酸钠、卵磷脂以及脂肪酸甘油酯中的一种或多种;
15.所述具有层状自组装能力的分子或聚合物选自聚己内酯
‑
b
‑
聚环氧乙烷、聚乙二醇单甲醚
‑
b
‑
聚乳酸、烯基琥珀酸、单硬脂酸甘油酯和十二烷基衣康酸甘油酯中的一种或多种;
16.所述可聚合单体为丙烯酰胺、丙烯酸和乙烯醇中的一种或多种;所述可聚合单体在自组装前驱液中的浓度为0.1
‑
10m;
17.所述具有层状自组装能力的分子或聚合物和表面活性剂摩尔比为1000:1
‑
1:1;
18.所述具有层状自组装能力的分子或聚合物和可聚合单体的混合比例为1:1
‑
1:100;
19.所述恒温搅拌具体为30℃
‑
100℃条件下搅拌10分钟
‑
1000分钟。
20.进一步地,所述步骤(2)中:
21.引发剂为光引发剂或热引发剂,其在自组装前驱液中的质量浓度为0.05
‑
0.5%;
22.所述引发聚合具体为:以0.1
‑
5cm/s的速度注入由间隔为0.01
‑
5mm的平行玻璃板组成的反应池中,在光聚或者热聚条件下聚合5
‑
8小时;
23.所述步骤(3)中:电解液选自浓度为0.01
‑
10m的氯化锂、氯化钠、磷酸、硫酸、氢氧化钠和氢氧化钾中的一种,浸泡时间为0.1
‑
1000h。
24.本发明的技术方案之二,上述人工智能皮肤在方向识别的传感器、彩色柔性显示器和自适应隐身设备中的应用。
25.本发明的技术方案之三,一种彩色柔性显示器,具体结构上述人工智能皮肤、电子推杆阵列、动力驱动模块、中央处理器、电源管理模块;
26.其中人工智能皮肤置于电子推杆之上;中央处理器由指令中心、处理器计算中心和通用端口组成;所述中央处理器内的指令中心,与所述电子推杆阵列连接,用于对电子推杆阵列发送控制指令进行彩色颜色的显示;所述中央处理器内的处理器计算中心,与所述指令中心和通用端口连接,用于产生控制电机运转的脉冲信号;所述中央处理器内的通用端口,通过连接数据线与动力驱动装置连接,用于将控制信号传递给动力驱动装置;
27.动力驱动装置包括:步进器、回路电机、保护电路和连接数据线;所述的步进器,与所述中央处理器的通用端口连接,用于执行中央处理器发送的数据指令;所述的回路电机,
与所述步进器和保护电路连接,用于向步进器提供工作电压;所述的保护电路,与所述步进器和电机连接,内置带迟滞效应的过热保护,温度下降后自动恢复工作;所述的连接数据线,与所述的中央处理器和电源管理模块连接,用于数据传输。
28.进一步地,所述电子推杆阵列为相同的微型电子推杆,形状为圆形、矩形和椭圆形中的一种,圆形尺寸直径0.1cm
‑
10cm,矩形尺寸0.1
‑
10cm
×
0.1
‑
10cm,椭圆形尺寸长直径和短直径尺寸分别为0.1cm
‑
10cm。
29.本发明的技术方案之四,一种自适应隐身设备,具体结构包括上述人工智能皮肤、摄像头模块、中央处理器、动力驱动装置、电源管理模块和显示装置;
30.其中人工智能皮肤置于显示装置内;所述的摄像头模块包括光感原件、通信数据口和连接数据线;所述摄像头上的光感元件,与通信数据口连接,用于将背景信息转换为编码信息;所述摄像头上的通信数据口,与所述光感元件和中央处理器连接,将编码信息数据传递给中央处理器;连接数据线,与所述的摄像头模块和中央处理器连接,用于数据传输;所述的中央处理器包括指令中心、处理器计算中心、通用端口和连接数据线组成;所述中央处理器内的指令中心,与所述摄像头模块连接,用于对摄像头模块发送控制指令进行背景信息收集和读取串行通信数据口发送的数据;所述中央处理器内的处理器计算中心,与所述指令中心和通用端口连接,用于产生控制电机运转的脉冲信号;所述中央处理器内的通用端口,通过连接数据线与动力驱动装置连接,用于将控制信号传递给动力驱动装置;连接数据线,与所述的中央处理器和动力驱动装置连接,用于数据传输。所述的动力驱动装置包括步进器、回路电机、保护电路和连接数据线;所述步进器,与中央处理器的通用端口连接,用于执行中央处理器发送的数据指令;动力驱动装置步进器里的回路电机,与所述步进器和保护电路连接,用于向步进器提供工作电压;动力驱动装置步进器里的保护电路,与所述步进器和电机连接,内置带迟滞效应的过热保护,温度下降后自动恢复工作;连接数据线,与所述的中央处理器和电源管理模块连接,用于数据传输。
31.与现有技术相比,本发明的有益效果:
32.本发明提供的人工智能皮肤以具有光子晶体结构的水凝胶为基础,其中具有光子晶体结构的水凝胶表现出光学、电学以及力学的各向异性响应能力。基于具有各向异性响应能力的水凝胶,结合外部驱动电路和机电系统,可制备多功能的人工智能皮肤。基于其力学的各向异性响应能力,制备得到的人工智能皮肤可以方便地区分施加应力的方向,而无需复杂的传感器设计或苛刻的处理条件,在柔性触摸屏、运动轨迹追踪器等领域有着广泛的应用价值。基于其周期性可调的光子晶体结构,制备得到的人工智能皮肤可以在应变条件下在整个可见光区域内实现实时可逆的颜色响应,在电
‑
光双响应人机交互、柔性显示和自适应伪装等领域有着广阔的应用前景。
33.本发明人工智能皮肤基于一种彩色水凝胶电解质薄膜制备,具有内在各向异性响应能力,具有制备简单、反应过程容易控制且重复性高、易于调节等特点;基于各向异性水凝胶的人工智能皮肤可以方便地通过电信号检测力和运动的方向而无需复杂的电路设计和精细的工艺设计,可用于柔性触摸屏、运动轨迹追踪器等方向;可以在整个可见光区域内对施加的应变产生瞬时和可逆的颜色响应,将其贴敷人体,运动时可通过人眼以实现实时有效的人机交互,实现光电双响应;本发明人工智能皮肤还可应用于新型柔性全彩显示屏和自适应伪装等先进场景。
附图说明
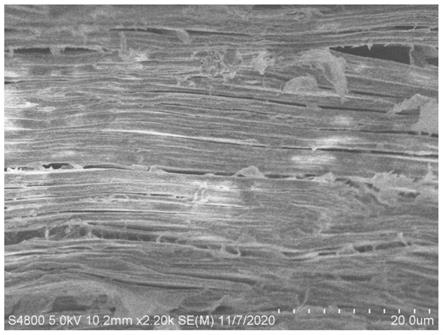
34.图1为本发明实施例1中彩色水凝胶电解质薄膜截面sem图;
35.图2为本发明实施例2中人工智能皮肤的光学各项异性测试结果图;
36.图3为本发明实施例2中人工智能皮肤的电学各项异性测试结果图;
37.图4为本发明实施例2中人工智能皮肤的力学各项异性测试结果图;
38.图5为本发明实施例2中人工智能皮肤作为运动轨迹追踪的场景应用图。
具体实施方式
39.现详细说明本发明的多种示例性实施方式,该详细说明不应认为是对本发明的限制,而应理解为是对本发明的某些方面、特性和实施方案的更详细的描述。
40.应理解本发明中所述的术语仅仅是为描述特别的实施方式,并非用于限制本发明。另外,对于本发明中的数值范围,应理解为还具体公开了该范围的上限和下限之间的每个中间值。在任何陈述值或陈述范围内的中间值以及任何其他陈述值或在所述范围内的中间值之间的每个较小的范围也包括在本发明内。这些较小范围的上限和下限可独立地包括或排除在范围内。
41.除非另有说明,否则本文使用的所有技术和科学术语具有本发明所述领域的常规技术人员通常理解的相同含义。虽然本发明仅描述了优选的方法和材料,但是在本发明的实施或测试中也可以使用与本文所述相似或等同的任何方法和材料。本说明书中提到的所有文献通过引用并入,用以公开和描述与所述文献相关的方法和/或材料。在与任何并入的文献冲突时,以本说明书的内容为准。
42.在不背离本发明的范围或精神的情况下,可对本发明说明书的具体实施方式做多种改进和变化,这对本领域技术人员而言是显而易见的。由本发明的说明书得到的其他实施方式对技术人员而言是显而易见得的。本发明说明书和实施例仅是示例性的。
43.关于本文中所使用的“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
44.实施例1水凝胶电解质薄膜的制备
45.(1)将3.17
×
10
‑5g表面活性剂十二烷基硫酸钠(sds),0.164g两亲性分子十二烷基甘油衣康酸酯(dgi),0.569g可聚合单体丙烯酰胺(aam)和6.17
×
10
‑4g交联剂n,n
′
亚甲基双丙烯酰胺(mbaa)分散在4ml的去离子水中,50℃下以500rpm/min的转速搅拌,直至得到均匀透明的混合溶液;
46.(2)步骤(1)中的混合溶液中加入0.0018g光引发剂2
‑
羟基
‑
4'
‑
(2
‑
羟基乙氧基)
‑2‑
甲基苯丙酮后避光条件下在50℃下以500rpm/min的转速搅拌5min后,再在55℃条件下在水浴锅中成相24小时直至得到均匀透亮的淡蓝色溶液;
47.(3)步骤(2)中的淡蓝色混合溶液注入到间隔为1000μm的玻璃模具中,55℃条件下在紫外交联仪中光聚合6小时,得到水凝胶;
48.(4)将所得水凝胶先在水溶液中水解100小时,得到快速变色的水凝胶。
49.(5)将步骤(4)得到的水凝胶在2m氯化锂溶液中溶胀24小时直至平衡,得到彩色水凝胶电解质薄膜。
50.制得的彩色水凝胶电解质薄膜截面sem图见图1,由图1可以得出彩色水凝胶电解
质薄膜为层状结构,而无光子晶体结构的普通水凝胶为多孔状结构。
51.实施例2人工智能皮肤的制备
52.(1)将3.17
×
10
‑5g表面活性剂十二烷基硫酸钠(sds),0.164g两亲性分子十二烷基甘油衣康酸酯(dgi),0.569g可聚合单体丙烯酰胺(aam)和6.17
×
10
‑4g交联剂n,n
′
亚甲基双丙烯酰胺(mbaa)分散在4ml的去离子水中,50℃下以500rpm/min的转速搅拌,直至得到均匀透明的混合溶液;
53.(2)步骤(1)中的混合溶液中加入0.0018g光引发剂2
‑
羟基
‑
4'
‑
(2
‑
羟基乙氧基)
‑2‑
甲基苯丙酮后避光条件下在50℃下以500rpm/min的转速搅拌5min后,再在55℃条件下在水浴锅中成相24小时直至得到均匀透亮的淡蓝色溶液;
54.(3)步骤(2)中的淡蓝色混合溶液注入到间隔为1000μm的玻璃模具中,55℃条件下在紫外交联仪中光聚合6小时,得到水凝胶;
55.(4)将所得水凝胶先在水溶液水解100小时,得到快速变色的水凝胶;
56.(5)将步骤(4)得到的水凝胶在2m氯化锂溶液中溶胀24小时直至平衡,得到彩色水凝胶电解质薄膜;
57.(6)将制备的水凝胶电解质薄膜制备电阻式人工智能皮肤,具体结构为:vhb/电极材料/水凝胶电解质薄膜/电极材料/vhb,电极材料为铜贴片,组成电阻式人工智能皮肤;
58.对制得的人工智能皮肤进行光学各向异性、电学各向异性、力学各向异性实验验证具体过程如下:
59.对于光学各向异性采用入射光肉眼检测,将人工智能皮肤放置于黑色桌子上,白光照射,然后从不同角度观察人工智能皮肤颜色的变化;
60.对于电学各向异性采用阻抗测试仪检测,交流阻抗谱使用参考600 仪器(gamry instruments)在1mhz到0.1hz的频率范围内测量,振幅为40mv。采用源计(2635a,吉时利)测量不同直流偏置下人工智能皮肤的电流密度随时间的函数,电流方向分别按照可平行于凝胶顶面,即沿层状双层的方向和垂直于凝胶顶部;
61.对于力学各向异性采用商用试验机(tensilon rtc
‑
1310a,orientec co.)分析。试验前,用凝胶切割器(jis
‑
k6251
‑
7)将板状散装凝胶切割成哑铃形标准尺寸,压缩分别按照可平行于凝胶顶面,即沿层状双层的方向和垂直于凝胶顶部。
62.具体结果见图2
‑
4;由图2可以得出制备的人工智能皮肤对入射光的角度具有依赖性,简单来说就是不同角度观察可以得到不同的颜色,由图3可以得出,对于同一个人工智能皮肤,从不同方向测试阻抗,两者相差甚远,可以达到两个数量级,由图4可以得出,对于同一光子晶体水凝胶,从不同方向按压得到的应力应变曲线是不同的,得到的弹性模量也是相差很大。
63.将制备的人工智能皮肤作为运动轨迹追踪的场景应用,具体过程如下:
64.制备运动轨迹追踪器件结构为vhb/电极/人工智能皮肤/电极/vhb,手指直接在vhb上书写汉字。
65.结果见图5,由图5可以得出,可以根据所得的具有各向异性响应的人工智能皮肤进行汉字的书写和辨别。
66.实施例3自适应伪装器件的制备
67.将实施例2制备的电阻式人工智能皮肤作为显色单元,结合电机模块组成自适应
伪装器件,具体结构包括上述人工智能皮肤、摄像头模块、中央处理器、动力驱动装置、电源管理模块和显示装置;
68.其中人工智能皮肤置于显示装置内;所述的摄像头模块包括光感原件、通信数据口和连接数据线组成;所述摄像头上的光感元件,与通信数据口连接,用于将背景信息转换为编码信息;所述摄像头上的通信数据口,与所述光感元件和中央处理器连接,将编码信息数据传递给中央处理器;连接数据线,与所述的摄像头模块和中央处理器连接,用于数据传输;所述的中央处理器包括指令中心、处理器计算中心、通用端口和连接数据线组成;所述中央处理器内的指令中心,与所述摄像头模块连接,用于对摄像头模块发送控制指令进行背景信息收集和读取串行通信数据口发送的数据;所述中央处理器内的处理器计算中心,与所述指令中心和通用端口连接,用于产生控制电机运转的脉冲信号;所述中央处理器内的通用端口,通过连接数据线与动力驱动装置连接,用于将控制信号传递给动力驱动装置;连接数据线,与所述的中央处理器和动力驱动装置连接,用于数据传输。所述的动力驱动装置包括步进器、回路电机、保护电路和连接数据线;所述步进器,与中央处理器的通用端口连接,用于执行中央处理器发送的数据指令;动力驱动装置步进器里的回路电机,与所述步进器和保护电路连接,用于向步进器提供工作电压;动力驱动装置步进器里的保护电路,与所述步进器和电机连接,内置带迟滞效应的过热保护,温度下降后自动恢复工作;连接数据线,与所述的中央处理器和电源管理模块连接,用于数据传输。
69.对制得的自适应伪装器件进行性能验证,具体过程如下:
70.在电源供电下,写入自适应伪装程序,经过中央处理器对程序转换,然后将命令发布给动力驱动装置;动力驱动装置接收到命令之后对带有人工智能皮肤的显色设置发出相应动作,即改变拉力的大小;;
71.具体结果:
72.显示装置中的人工智能皮肤在外部拉力的作用下发生形变产生了与拉力对应的颜色变化,结果颜色与环境的颜色一致;
73.因此,本实施例设备通过摄像头对外部环境的颜色进行识别,中央处理器是接收摄像头处理完成后的颜色信息并转换成控制信号输送到动力驱动装置,动力驱动装置在中央处理器的控制信号下产生大小可以变的拉力,人工智能皮肤在外部拉力的作用下发生形变产生了与拉力对应的颜色变化,使之与环境的颜色一致,从而实现了自适应隐身的目的。
74.实施例4柔性显示器件的制备
75.将实施例2制备的人工智能皮肤制备柔性显示器件,具体结构包括:人工智能皮肤、电子推杆阵列、动力驱动模块、中央处理器、电源管理模块;
76.其中人工智能皮肤置于电子推杆之上;其中中央处理器由指令中心、处理器计算中心和通用端口组成;所述中央处理器内的指令中心,与所述电子推杆阵列连接,用于对电子推杆阵列发送控制指令进行彩色颜色的显示;所述中央处理器内的处理器计算中心,与所述指令中心和通用端口连接,用于产生控制电机运转的脉冲信号;所述中央处理器内的通用端口,通过连接数据线与动力驱动装置连接,用于将控制信号传递给动力驱动装置;
77.动力驱动装置包括:步进器、回路电机、保护电路和连接数据线;所述的步进器,与所述中央处理器的通用端口连接,用于执行中央处理器发送的数据指令;所述的回路电机,与所述步进器和保护电路连接,用于向步进器提供工作电压;所述的保护电路,与所述步进
器和电机连接,内置带迟滞效应的过热保护,温度下降后自动恢复工作;所述的连接数据线,与所述的中央处理器和电源管理模块连接,用于数据传输。
78.对制得的自适应伪装器件进行性能验证,具体过程如下:
79.在电源供电下,写入自适应伪装程序,经过中央处理器对程序转换,然后将命令发布给电子推杆,电子推杆在中央处理器的控制信号下产生大小可以变的推力,人工智能皮肤在电子推杆外部压力的作用下发生形变;
80.具体结果:
81.人工智能皮肤在电子推杆外部压力的作用下发生形变,发生布拉格衍射产生了相应的颜色变化;
82.由结果可得:本发明实施例将人工智能皮肤作为显色单元,结合电机模块组成柔性显示器件。该设备通过电子推杆行程的距离控制显色部分的颜色,将图形的数字信号转换为电子信号,控制信号输送到动力驱动装置,即电子推杆,动力驱动装置在中央处理器的控制信号下产生大小可以变的推力,人工智能皮肤在外部压力的作用下发生形变,发生布拉格衍射产生了相应的颜色变化,达到柔性图案显示的目的。
83.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。