1.本实用新型涉及康复训练器械领域,具体涉及一种肘关节快速左右切换的智能上肢反馈训练系统。
背景技术:
2.上肢康复训练装置能够代替大量医务人员对患者进行重复而又单一的康复训练,从而有效地改善患者肌肉萎缩症状,避免肌肉功能的永久性丧失,由于左右上肢分别采用不同的训练装置成本高,因此目前大多数上肢训练装置采用左肢或者右肢体的结构,训练时互换一下相关结构便可,但是目前的上肢康复训练装置对于上肢整体的左右互换非常麻烦,拆装困难耗时,给患者带来了不好的体验。
3.肘关节处结构在进行左右上肢训练时是完全相反的,而且人的前臂摆动时只能相对后臂向内摆动,而无法相对后臂向外摆动,受此要求限制,目前肘关节的左右更换非常繁琐。
4.有鉴于上述现有技术存在的问题,本实用新型结合相关领域多年的设计及使用经验,辅以过强的专业知识,设计制造了一种肘关节快速左右切换的智能上肢反馈训练系统,来克服上述缺陷。
技术实现要素:
5.对于现有技术中所存在的问题,本实用新型提供的一种肘关节快速左右切换的智能上肢反馈训练系统,能够快速实现肘关节的左右切换要求。
6.为了实现上述目的,本实用新型采用的技术方案如下:一种肘关节快速左右切换的智能上肢反馈训练系统,包括训练平台,所述训练平台上设有立柱,所述立柱上设有机壳,所述机壳上可滑动有手臂支架,所述手臂支架末端设有肩部连接装置,所述肩部连接装置另一端设有后臂训练装置,所述后臂训练装置另一端设有前臂训练装置,所述前臂训练装置和后臂训练装置之间设有肘关节结构,所述肘关节结构使所述前臂训练装置绕所述后臂训练装置摆动;
7.所述肘关节结构包括前后设置的前臂连接架和后臂连接架,所述前臂连接架底部设有第一摆动臂,所述后臂连接架底部设有第二摆动臂,所述第一摆动臂和第二摆动臂向相反方向延伸;
8.所述肘关节结构还包括连接臂,所述连接臂的两端分别与所述第一摆动臂延伸端和第二摆动臂延伸端铰接,所述第一摆动臂和第二摆动臂均设置在所述连接臂的一侧,所述连接臂上设有第一定位孔和第二定位孔,所述第一摆动臂上设有第一摆动限位孔,所述第二摆动臂上设有第二摆动限位孔,所述第一定位孔可与所述第一摆动限位孔重合并插设有插销,所述第二定位孔可与所述第二摆动限位孔重合并插设有插销。
9.优选的,所述第一摆动臂转动到连接臂一侧时,所述连接臂或第一摆动臂上设有限位结构限制所述第一摆动臂继续逆时针摆动,所述第二摆动臂转动到连接臂一侧时,所
述连接臂或第二摆动臂上设有限位结构限制所述第二摆动臂继续逆时针摆动,
10.优选的,所述限位结构设为凸台,所述凸台设置在所述连接臂上,所述凸台可分别与所述第一摆动臂或第二摆动臂抵触;或所述凸台分别设置在所述第一摆动臂和第二摆动臂上,所述凸台的延伸高度可与所述连接臂一侧抵触。
11.优选的,所述凸台上设有防抵触缓冲结构。
12.优选的,所述第一定位孔和第二定位孔设为螺纹孔,所述插销设为分度销。
13.优选的,所述分度销设为gn717分度销。
14.优选的,所述连接臂与所述第一摆动臂延伸端通过第一铰接轴铰接,所述第一铰接轴与所述第一摆动臂固定连接,所述第一铰接轴端部设有角度传感器;
15.所述连接臂与所述第二摆动臂延伸端通过第二铰接轴铰接,所述第二铰接轴与所述第二摆动臂固定连接,所述第二铰接轴端部设有角度传感器。
16.优选的,所述第一定位孔和第二定位孔分别设置在所述前臂连接架底部和后臂连接架底部。
17.该实用新型的有益之处在于:
18.1.本实用新型若进行右臂的康复训练,只需要保证插销插入第一定位孔和第一摆动限位孔,使连接臂与第一摆动臂固定连接,而第二定位孔和第二摆动限位孔中插销脱离,连接臂与第二摆动臂仅通过第二铰接轴铰接,这样右臂可以进行摆动康复训练;而若进行左臂的康复训练,只需要保证插销插入第二定位孔和第二摆动限位孔,使连接臂与第二摆动臂固定连接,而第一定位孔和第一摆动限位孔中插销脱离,连接臂与第一摆动臂仅通过第一铰接轴铰接,这样左臂可以进行摆动康复训练。
19.2.本实用新型仅通过两个插销的插拔便解决了左右上肢训练的快速切换,操作简单,体验性高。
20.3.本实用新型采用凸台进行保证了第一摆动臂和第二摆动臂在摆动过程中的限位,保证了摆动过程仿真前臂与后臂的摆动特点,整体结构简单。
附图说明
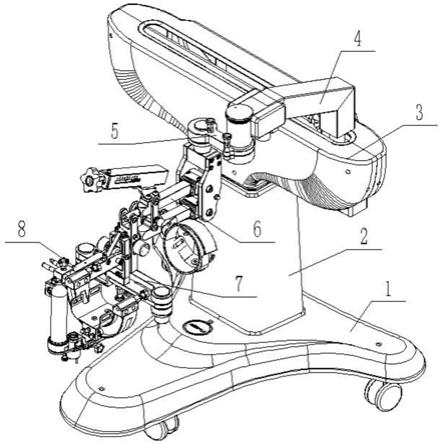
21.图1为一种肘关节快速左右切换的智能上肢反馈训练系统的结构示意图;
22.图2为本实用新型肘关节结构的主视图;
23.图3为本实用新型肘关节结构的结构示意图;
24.图4为本实用新型肘关节结构的底部视角的结构示意图。
25.图中:1
‑
训练平台、2
‑
立柱、3
‑
机壳、4
‑
手臂支架、5
‑
肩部连接装置、6
‑
后臂训练装置、7
‑
肘关节结构、8
‑
前臂训练装置、71
‑
前臂固定架、72
‑
第一摆动臂、73
‑
第二摆动臂、74
‑
第一铰接轴、75
‑
第二铰接轴、76
‑
插销、77
‑
角度传感器、78
‑
后臂连接架、79
‑
前臂连接架、80
‑
防抵触缓冲结构。
具体实施方式
26.为了便于本领域技术人员理解,下面结合附图对本实用新型作进一步的说明。
27.如图1至图4所示,一种肘关节快速左右切换的智能上肢反馈训练系统,包括训练平台1,训练平台1上设有立柱2,立柱2上设有机壳3,机壳3上可滑动有手臂支架4,手臂支架
4末端设有肩部连接装置5,肩部连接装置5另一端设有后臂训练装置6,后臂训练装置6另一端设有前臂训练装置8,前臂训练装置8和后臂训练装置6之间设有肘关节结构7,肘关节结构7使前臂训练装置8绕后臂训练装置6摆动,由于左右上肢训练时肘关节的摆动方向是不同的,因此为提高左右上肢训练时肘关节处相关设备的快速切换,对肘关节结构7进行设计。
28.本实用新型肘关节结构7包括前后设置的前臂连接架79和后臂连接架78,前臂连接架79底部设有第一摆动臂72,后臂连接架78底部设有第二摆动臂73,第一摆动臂72和第二摆动臂73向相反方向延伸,肘关节结构7还包括连接臂,连接臂的两端分别与第一摆动臂72延伸端和第二摆动臂73延伸端铰接,第一摆动臂72和第二摆动臂73均设置在连接臂的一侧,连接臂上设有第一定位孔和第二定位孔,第一定位孔和第二定位孔优选分别设置在前臂连接架79底部和后臂连接架78底部,第一摆动臂72上设有第一摆动限位孔,第二摆动臂73上设有第二摆动限位孔,第一定位孔可与第一摆动限位孔重合并插设有插销76,第二定位孔可与第二摆动限位孔重合并插设有插销76。
29.本实用新型若进行右臂的康复训练,只需要保证插销76插入第一定位孔和第一摆动限位孔,使连接臂与第一摆动臂72固定连接,而第二定位孔和第二摆动限位孔中插销76脱离,连接臂与第二摆动臂73仅通过第二铰接轴75铰接,这样右臂可以进行摆动康复训练;而若进行左臂的康复训练,只需要保证插销76插入第二定位孔和第二摆动限位孔,使连接臂与第二摆动臂73固定连接,而第一定位孔和第一摆动限位孔中插销76脱离,连接臂与第一摆动臂72仅通过第一铰接轴铰接,这样左臂可以进行摆动康复训练。具体仅通过两个插销76的插拔便解决了左右上肢训练的快速切换,操作简单,体验性高。
30.为保证摆动过程仿真前臂与后臂的摆动特点,因此本实用新型第一摆动臂72转动到连接臂一侧时,要求设计连接臂或第一摆动臂72上设有限位结构限制第一摆动臂72继续逆时针摆动,而第二摆动臂73转动到连接臂一侧时,连接臂或第二摆动臂73上设有限位结构限制第二摆动臂73继续逆时针摆动,具体限位结构设为凸台,凸台设置在连接臂上,凸台可分别与第一摆动臂72或第二摆动臂73抵触;或凸台分别设置在第一摆动臂72和第二摆动臂73上,凸台的延伸高度可与连接臂一侧抵触。同时凸台上设有防抵触缓冲结构80,防止刚性碰撞影响康复者体验。
31.本实用新型第一定位孔和第二定位孔设为螺纹孔,插销76设为分度销,分度销优选设为gn717分度销,操作简单。
32.为达到科学康复训练的目的,使康复者能够直观的感受到康复训练的过程及效果,本实用新型设置相应的传感器,具体结构为:连接臂与第一摆动臂72延伸端通过第一铰接轴铰接,第一铰接轴与所述第一摆动臂72固定连接,第一铰接轴端部设有角度传感器77;连接臂与第二摆动臂73延伸端通过第二铰接轴75铰接,第二铰接轴75与第二摆动臂73固定连接,第二铰接轴75端部设有角度传感器77,通过角度传感器77能够有效的观察到前臂相对后臂的摆动角度,从而更具人性化。
33.应当理解,这些实施例的用途仅用于说明本实用新型而非意欲限制本实用新型的保护范围。此外,也应理解,在阅读了本实用新型的技术内容之后,本领域技术人员可以对本实用新型做各种改动、修改和/或变型,所有的这些等价形式同样落于本技术所附权利要求书所限定的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。