1.本实用新型涉及超精密加工技术领域,更具体地说,它涉及一种飞切机床纳米调姿补偿装置及卧式超精密飞切机床。
背景技术:
2.磷酸二氢钾(kdp)晶体由于激光损伤阈值高和透光率好等优良光学性能,被广泛应用于高功率激光装置等国家重大科学工程中,是实现光电开关与倍频转换的重要光学材料。kdp晶体光学元件的使用性能与其表面形貌精度密切相关,例如大功率激光系统对kdp晶体光学元件的低频面形误差、中频波纹误差和高频粗糙度误差分别提出了不同的极高制造精度要求。
3.而kdp晶体由于质软、易碎、易潮解和各向异性等特点,而被公认为是最难加工的光学材料之一。传统的研磨抛光加工工艺难以达到kdp晶体光学元件所需的精度要求,超精密飞切加工是目前加工kdp晶体光学元件最有效和使用最广泛的加工方式,但切削表面通常存在低频“类马鞍”形状误差。对于高功率激光装置,此类低频几何形状误差容易造成激光光束的偏斜或发散,使得光束超出靶丸的接收范围,甚至会引起激光的异常聚焦而破坏光学元件。研究表明,加工过程中主轴倾角摆动误差是导致飞切加工表面产生低频“类马鞍”形状误差的主要原因,如图1所示。针对此类低频误差,现有的抑制方法通常是对机床结构设计优化,更换主轴,浪费大量的时间和成本,而在现有的飞切机床上,此类低频误差通常难以得到有效消除。
4.因此,如何研究设计一种飞切机床纳米调姿补偿装置及卧式超精密飞切机床是我们目前急需解决的问题。
技术实现要素:
5.为解决现有技术中的不足,本实用新型的目的是提供一种飞切机床纳米调姿补偿装置及卧式超精密飞切机床,通过实时调姿以减小主轴倾角摆动对加工面形的影响,实现对飞切表面低频“类马鞍”形状误差有效抑制,从而提高卧式飞切机床的加工精度。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:
7.第一方面,提供了一种飞切机床纳米调姿补偿装置,包括底座和支撑部,支撑部设有供加工工件固定的安装平台,所述支撑部设有三个沿安装平台四周呈三角分布的柔性铰链,每个柔性铰链与底座之间对应设有至少一个位移驱动件以及至少一个位移检测件。
8.进一步的,所述支撑部呈三角形中空框架,柔性铰链分布在支撑部对应边框的中部。
9.进一步的,所述位移驱动件位于柔性铰链与底座的相向面之间,位移检测件位于支撑部的外侧,且位移驱动件、位移检测件均垂直于底座表面设置。
10.进一步的,所述位移驱动件为压电陶瓷。
11.进一步的,所述位移检测件为电容传感器。
12.进一步的,所述安装平台为带孔的真空吸盘。
13.第二方面,提供了一种卧式超精密飞切机床,包括床身以及安装在床身上的进给组件、定位组件,进给组件设置有用于安装飞刀盘的气浮主轴,定位组件安装有如第一方面中任意一项所述的三自由度纳米调姿补偿装置。
14.进一步的,所述床身底部设有支撑组件,床身与支撑组件之间设有至少一个隔振组件。
15.与现有技术相比,本实用新型具有以下有益效果:
16.1、本实用新型设计的三自由度纳米调姿补偿装置,由三组圆形柔性铰链与三组相同型号的堆叠式压电陶瓷呈等边三角形对称分布组成三维虚拟快刀装置,结构布局合理刚度高,自由度数与驱动元件数相同,无冗余且无需解耦,能够更加精确的实现纳米级精度的姿态调节功能;
17.2、本实用新型基于加工过程中飞切机床气浮主轴轴线倾角摆动的变化规律,同时结合飞切机床主轴角度编码器实时测得的角度信号,通过控制吸附在三自由度纳米调姿装置上的kdp晶体的姿态,使kdp晶体的工件中心线与加工过程的主轴轴线始终相互平行,实现对飞切加工表面低频“类马鞍”形状误差的有效抑制;本实用新型有效解决现有超精密飞切加工机床加工表面存在的低频“类马鞍”形状误差问题,对气浮主轴的旋转精度无需特别苛刻要求的条件下,通过无需解耦的三自由度纳米调姿装置,依据主轴轴线摆动规律,实现低频“类马鞍”形状误差的有效消除,保证飞切加工的kdp晶体在高功率激光装置中的精度使用要求。
18.3、本实用新型通过对断续切削力作用下空气静压轴承的动态特性进行分析,获得断续切削力作用下气浮轴承的动刚度与动阻尼系数,建立轴承
‑
转子系统的动力学模型,获得精确的卧式飞刀切削主轴倾角摆动预测模型。
附图说明
19.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。在附图中:
20.图1是本实用新型实施例中主轴倾角摆动引起的飞切表面低频“类马鞍”形状误差示意图;
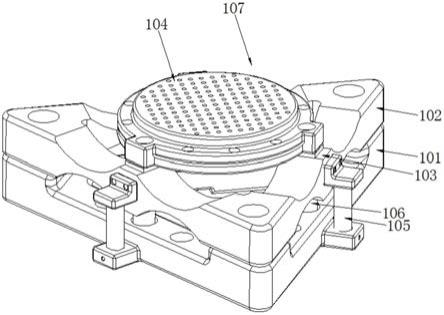
21.图2是本实用新型实施例中三自由度纳米调姿补偿装置的结构示意图;
22.图3是本实用新型实施例中三自由度纳米调姿补偿装置与飞切机床的集成安装示意图;
23.附图中标记及对应的零部件名称:
24.101、底座;102、支撑部;103、柔性铰链;104、安装平台;105、位移检测件;106、位移驱动件;107、三自由度纳米调姿补偿装置;201、床身;202、进给组件;203、气浮主轴;204、定位组件;205、隔振组件;206、支撑组件。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本
实用新型,并不作为对本实用新型的限定。
26.需说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接在另一个部件上或者间接在该另一个部件上。当一个部件被称为是“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。
27.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.实施例1:一种飞切机床纳米调姿补偿装置,如图2所示,包括底座101和支撑部102,支撑部102设有供加工工件固定的安装平台104,所述支撑部102设有三个沿安装平台104四周呈三角分布的柔性铰链103,每个柔性铰链103与底座101之间对应设有一个位移驱动件106以及一个位移检测件105。在本实施例中,位移驱动件106为压电陶瓷,位移检测件105为电容传感器,安装平台104为带孔的真空吸盘,真空吸盘以真空吸附方式实现对kdp晶体的夹紧。
30.支撑部102呈正三角形中空框架,柔性铰链103分布在支撑部102对应边框的中部。
31.位移驱动件106位于柔性铰链103与底座101的相向面之间,位移检测件105位于支撑部102的外侧,且位移驱动件106、位移检测件105均垂直于底座101表面设置。
32.实施例2:一种卧式超精密飞切机床,如图3所示,卧式超精密飞切机床包括从下至上依次设置的支撑组件206、四个隔振组件205、床身201,床身201上表面设有进给组件202和定位组件204,进给组件202上设置有用于安装飞刀盘的气浮主轴203,三自由度纳米调姿补偿装置107安装在定位组件204上,通过控制气浮主轴203直线运动实现飞刀盘上金刚石刀具的进给,通过根据不同输入指令对三个压电陶瓷进行控制,实现kdp晶体的姿态调节,使kdp晶体的工件中心线与加工过程的气浮主轴203轴线始终相互平行。以此减小在断续切削过程中气浮主轴203轴线倾角摆动对飞切加工表面误差的影响,抑制由气浮主轴203轴线摆动产生的低频“类马鞍”形状误差。因此,能够实现在不需要更换气浮主轴203的条件下,能较为灵活的有效抑制低频“类马鞍”形状误差。
33.需要说明的是,三自由度纳米调姿补偿装置107安装于卧式超精密飞切机床的z轴定位组件204上,气浮主轴203和带有金刚石刀具的飞刀盘安装在x轴上。
34.工作原理:基于加工过程中飞切机床气浮主轴203轴线倾角摆动的变化规律,同时结合飞切机床主轴角度编码器实时测得的角度信号,通过控制吸附在三自由度纳米调姿装置107上的kdp晶体的姿态,使kdp晶体的工件中心线与加工过程的主轴轴线始终相互平行,实现对飞切加工表面低频“类马鞍”形状误差的有效抑制。
35.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替
换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。