1.本实用新型涉及汽车搬运领域,具体涉及一种两层子母停车机器人。
背景技术:
2.随着国民经济的快速发展,国内外汽车的保有量迅速增加,停车难的问题日益明显,停车机器人是解决停车难的一个有效办法。目前地下车库净高一般都能达到3.6米以上,若规划成自然车位,空间浪费比较大;若规划成升降横移式或简易升降式机械车位,倒车入库、停车极其不方便;若规划成停车机器人车库,单层还是一样比较浪费空间。
3.现有的停车位若做成两层还要满足两个条件:1、总高度不能超过2.8米,因为一般大型地下停车库的消防卷帘门高度一般不低于2.8米,所以两层停车机器人总度要低于2.8米,否则两层停车机器人无法通过人防门,无法满足停车系统要求;2、停车位之间停车机器人通道宽度都必须达到6米,若两层停车机器人要在6米宽度内能够相互会车或避让,则两层升降式停车机器人宽度方向必须小于机器人通道宽度的一半,即宽度小于3米。
技术实现要素:
4.本实用新型的主要目的是提出了一种两层子母停车机器人,可以有效解决背景技术中设置双层停车位的困难的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:
6.一种两层子母停车机器人,包括夹持式汽车搬运器,所述夹持式汽车搬运器设置在升降停车机器人上,所述升降停车机器人包括升降系统、车身系统、动力系统及电气系统,所述夹持式汽车搬运器设置在升降系统上,所述升降系统固定安装在车身系统上,所述动力系统设置在车身系统的两端且用于驱动车身系统,所述电气系统设置用于对升降机器人的升降系统进行供电;
7.所述升降系统包括提升电机,所述提升电机通过提升电机座固定安装在车身系统上,所述提升电机的动力输出轴与驱动链轮同轴固定连接,所述驱动链轮通过链条与惰轮组件传动连接,所述惰轮组件转动安装在车身系统上;
8.所述车身系统包括行走架,相邻所述行走架之间通过连接横梁相固定,所述行走架之间固定安装有升降框架,所述升降框架的端部固定在链条上,所述夹持式汽车搬运器固定安装在升降框架上。
9.优选地,所述惰轮组件设置有四组,每组所述惰轮组件包括两个分别设置在车身底部及顶部的惰轮本体。
10.优选地,所述升降框架的端部固定连接有连接销轴,所述连接销轴远离连接升降框架的端部转动安装在链条上。
11.优选地,所述动力系统包括四组舵轮,四组所述舵轮分别通过舵轮安装架安装在安装在车身系统的四角。
12.优选地,所述电气系统包括电控箱,所述电控箱设置在车身系统底部且电控箱内
设置有电池,所述电池与逆变器、刷板、舵轮及提升电机电性连接。
13.优选地,所述电气系统还包括控制面板,所述控制面板与电控箱电性连接,所述电控箱电性连接有激光避让组件、三色灯及激光导航仪,所述激光避让组件分别设置在车身系统底部的四角,所述三色灯与激光导航仪均设置在车身系统的顶部。
14.优选地,所述车身系统的底边四周设置有安全防撞触边。
15.本实用新型提供一种两层子母停车机器人,具备以下有益效果:将夹持式汽车搬运器与升降停车机器人结合形成子母式停车结构,夹持式汽车搬运器放置在升降停车机器人上用于夹持待停车辆,通过升降停车机器人上设置的升降系统对夹持式汽车搬运器升降动作,升降停车机器人移动至泊车房指定位置,同时能够实现整车全方位移动,并能够实现与车位的卡口的完美精准对接。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
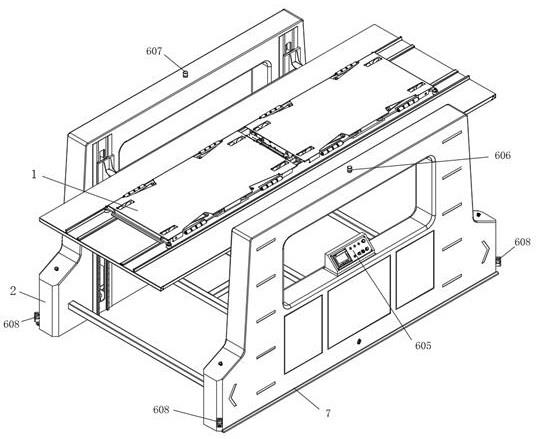
17.图1为本实用新型的外部结构示意图;
18.图2为本实用新型升降停车机器人的结构示意图;
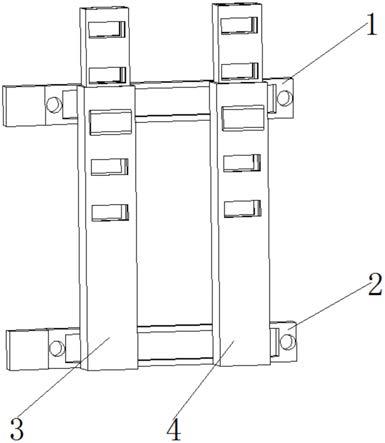
19.图3为本实用新型升降框架的结构示意图;
20.图4为本实用新型提升电机的安装位置示意图;
21.图5为图4中a
‑
a处的剖面示意图;
22.图中:1、夹持式汽车搬运器;2、升降停车机器人;3、升降系统;301、提升电机;302、驱动链轮;303、惰轮本体;304、连接销轴;305、链条;4、车身系统;401、行走架;402、连接横梁;403、升降框架;5、动力系统;501、舵轮;502、舵轮安装架;6、电气系统;601、电控箱;602、电池;603、逆变器;604、刷板;605、控制面板;606、激光避让组件;607、三色灯;608、激光导航仪;7、安全防撞触边。
具体实施方式
23.为使本实用新型目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
24.实施例一,如图1至图5所示,一种两层子母停车机器人,包括夹持式汽车搬运器1,夹持式汽车搬运器1设置在升降停车机器人2上,升降停车机器人2包括升降系统3、车身系统306、动力系统5及电气系统6,夹持式汽车搬运器1设置在升降系统3上,升降系统3固定安装在车身系统306上,动力系统5设置在车身系统306的两端且用于驱动车身系统306,电气系统6设置用于对升降机器人的升降系统3进行供电;
25.升降系统3包括提升电机301,提升电机301通过提升电机301座固定安装在车身系统306上,提升电机301的动力输出轴与驱动链轮302同轴固定连接,驱动链轮302通过链条305与惰轮组件传动连接,惰轮组件转动安装在车身系统306上;
26.车身系统306包括行走架401,相邻行走架401之间通过连接横梁402相固定,行走架401之间固定安装有升降框架403,升降框架403的端部固定在链条305上,夹持式汽车搬运器1固定安装在升降框架403上。
27.工作原理:将夹持式汽车搬运器1与升降停车机器人2结合形成子母式停车结构,升降停车机器人2是母车,夹持式汽车搬运器1是子车,夹持式汽车搬运器1放置在升降停车机器人2上用于夹持待停车辆,通过升降停车机器人2上设置的升降系统3对夹持式汽车搬运器1升降动作,升降停车机器人2移动至泊车房指定位置,同时能够实现整车全方位移动,并能够实现与车位的卡口的完美精准对接。
28.惰轮组件设置有四组,每组惰轮组件包括两个分别设置在车身底部及顶部的惰轮本体303。提升电机301设置有四组,均通过带动驱动链轮302转动带动链条305转动从而传动动力,保证升降框架403四周的同步运动,从而保证停车的稳定性,惰轮本体303设置在车身系统306的底部和顶部,能够保证升降框架403的行程符合双层停车场的高度需求。
29.升降框架403的端部固定连接有连接销轴304,连接销轴304远离连接升降框架403的端部转动安装在链条305上。升降框架403的端部通过连接销轴304与链条305之间相连接,连接销轴304与链条305之间相对可转动,能够提升连接的稳定性,在链条305晃动时不会带动升降框架403的转动。
30.动力系统5包括四组舵轮501,四组舵轮501分别通过舵轮安装架502安装在安装在车身系统306的四角。舵轮501设置在车身系统306的四周,能够独立全方位驱动,通过软件技算其行走路径能够实现平面内任意方向的移动,舵轮501转弯时不会损伤地面。
31.电气系统6包括电控箱1,电控箱1设置在车身系统306底部且电控箱1内设置有电池602,电池602与逆变器603、刷板604、舵轮501及提升电机301电性连接。电池602对各个部件工件,电控箱1内其他部件能够发出信号控制逆变器603、刷板604、舵轮501及提升电机301做出相应动作。设备采用免维护蓄电池602驱动,内置充电系统。单次自动充电时间最长2.5小时,手运充电6小时,设备可连续工作时间大于4小时。
32.电气系统6还包括控制面板605,控制面板605与电控箱1电性连接,电控箱1电性连接有激光避让组件606、三色灯607及激光导航仪608,激光避让组件606分别设置在车身系统306底部的四角,三色灯607与激光导航仪608均设置在车身系统306的顶部。通过布置在车身周边的激光避让组件606,能够识别机器本体运行周边3米内的障碍物,一旦识别到障碍物发出信号至电控箱1,使得舵轮501相对移动,从而能够避让障碍物。控制面板605显示屏上均实现设备状态显示,并可显示故障信息。
33.车身系统306的底边四周设置有安全防撞触边7,能够提升整个装置的安全性及使用寿命。舵轮501结实耐用,承载能力强,不损伤地面,侧移能够越过高度差为10毫米的障碍,其它方向均能顺利通过30毫米宽的沟槽。
34.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的描述中,需要说明的是,尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。