技术特征:
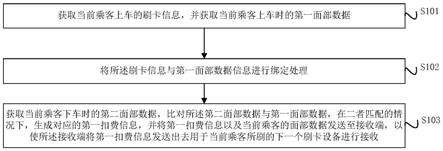
1.一种基于无人机遥感的航标巡检系统,其特征在于,包括控制系统、巡检主机和待巡检的航标;所述控制系统包括航标历史信息库,所述航标历史信息库包括基本航标信息和历史巡检信息,所述历史巡检信息包括在历史巡检中获得的航标的巡检特征以及航标的巡航权重;所述控制系统还包括路线分配模块、航标失常判断模块、失常原因采集模块和路线调整模块;所述路线分配模块用于分配所述巡检主机的巡检路线;所述航标失常判断模块用于通过巡检主机获得的航标信息判断航标是否失常,当所述航标被判断为失常时,将所述航标设置为失常航标;所述失常原因采集模块用于通过巡检主机对失常航标的失常信息进行采集;路线调整模块用于当巡检主机采集的失常航标的失常信息不能判断其失常原因时,调整巡检路线,使用其他巡检主机对失常航标的失常信息进行采集;所述巡检主机包括采集部件,用于采集航标信息和失常信息。2.如权利要求1所述的基于无人机遥感的航标巡检系统,其特征在于,所述巡检主机的采集部件包括光电吊舱和激光测距仪。3.如权利要求1所述的基于无人机遥感的航标巡检系统,其特征在于,所述航标包括航标主体,所述航标主体为灯塔、浮标、立柱或灯船其中的一种。4.如权利要求3所述的基于无人机遥感的航标巡检系统,其特征在于,所述航标还包括航标信息站,所述航标信息站设置在航标主体上,用于收集气象、水流、船舶交通方面的大数据信息。5.一种航标巡检方法,应用于如权利要求1
‑
4所述的基于无人机遥感的航标巡检系统,其特征在于,其步骤包括:s10,根据n个待巡检的航标r=[r1,r2,r3,
…
,r
n
],获得航标历史信息库中航标r对应的巡检权重rθ=[rθ1,rθ2,rθ3,
…
,rθ
n
],同时建立移除航标列表yr,所述移除航标列表yr包括第一移除列表yr1和第二移除列表yr2;s20,设置巡检任务a,所述巡检任务a包括m条巡检路线ah=[ah1,ah2,ah3,
…
,ah
m
],每条巡检路线对应由一台巡检主机进行巡检,所述巡检路线ah对应由巡检主机p=[p1,p2,p3,
…
,p
m
]进行巡检;其中,设置第i台巡检主机p
i
在巡检路线ah
i
上需要巡检的航标ir=[ir1,ir2,ir3,
…
,ir
k
],其中k<m;巡检路线ah
i
上需要巡检的航标ir对应的巡检权重irθ=[irθ1,irθ
2,
irθ3,
…
,irθ
k
];其中,设置巡检路线ah
i
上需要巡检的第j个航标ir
j
的巡检权重为irθ
j
,巡检路线ah
i
的总权重θ
i
=;设置巡检路线的权重阈值为θ0,则巡检路线ah
i
需要满足,同时满足巡检路线ah
i
上的航标数量;其中,e为自然常数,θ0<2e;
s30,在所述巡检主机p
i
在巡检路线ah
i
上对航标ir=[ir1,ir2,ir3,
…
,ir
k
]执行巡检任务的过程中,当巡检主机p
i
在巡检路线ah
i
上巡检的第j个航标ir
j
不属于移除航标列表yr时,转入步骤s31;当巡检主机p
i
在巡检路线ah
i
上巡检的第j个航标ir
j
属于移除航标列表yr时,转入步骤s32;s31,根据对航标ir
j
进行巡检时得到的巡检信息,判断航标ir
j
是否为失常航标,当判断为否时,继续巡检任务;当判断为是时,转入步骤s32;s32,巡检主机p
i
对失常航标ir
j
进行为判断其失常原因的二次采集任务;当根据巡检主机p
i
二次采集任务获得的巡检信息,能够判断失常航标ir
j
的失常原因时,巡检主机p
i
继续巡检任务;当根据巡检主机p
i
二次采集任务获得的巡检信息,无法判断失常航标ir
j
的失常原因时,转入步骤s40;s40,将失常航标ir
j
从巡检路线ah
i
转入第一移除列表yr1;更新巡检主机p
i
的巡检路线,得到巡检主机p
i
新的巡检路线ah
i’,巡检主机p
i
按照新的巡检路线ah
i’继续巡检任务;s50,获得第一移除列表yr1=[yr11,yr12,yr13,
…
,yr1
c
],c<n;同时设置距离阈值d0;当存在一个巡检主机p
j
的巡检路线ah
j
使得第一移除列表yr1中的第z个失常航标yr
z
到巡检路线ah
j
的距离d
z
≤d0时,其中j≠i,转入步骤s51;当不存在一个巡检主机p
j
的巡检路线ah
j
使得第一移除列表yr1中的第z个失常航标yr
z
到巡检路线ah
j
的距离d
z
≤d0时,其中j≠i,转入步骤s52;s51,将失常航标yr
z
由第一移除列表转入巡检路线ah
j
中,其中j≠i,更新巡检路线ah
j
得到新的巡检路线ah
j’,巡检主机p
j
按照更新后的巡检路线ah
j’进行巡检,转入步骤s30;s52,将失常航标yr
z
从第一移除列表yr1转入第二移除列表yr2,获得第二移除列表yr2=[yr21,yr22,yr23,
…
,yr2
b
],b<c;s60,当所有巡检主机的巡检任务都结束后,将第二移除列表yr2中的失常航标作为待巡检航标,转入步骤s10。6.如权利要求5所述的航标巡检方法,其特征在于,在步骤s50中,设置执行过失常航标ir
j
的二次采集任务的巡航主机为失常航标ir
j
的过滤主机,设置没有执行过失常航标ir
j
的二次采集任务的巡航主机为失常航标ir
j
的非过滤主机;第一移除列表中的失常航标ir
j
只能转入失常航标ir
j
的非过滤主机所在的巡航路线中。7.如权利要求6所述的航标巡检方法,其特征在于,当与失常航标ir
j
距离不超过距离阈值d0的非过滤主机的巡检路线有一条以上时,与失常航标ir
j
距离最短的巡检路线将失常航标ir
j
转入。8.如权利要求5所述的航标巡检方法,其特征在于,设置巡检主机ap
i
的飞行速度为v
i
,巡检主机ap
j
的飞行速度为v
j
,则有距离阈值d0=;其中,d
max
为使用单机巡检全部n个待巡检的航标时的总巡检距离。
9.如权利要求5所述的航标巡检方法,其特征在于,航标ir对应的巡检权重irθ=[irθ1,irθ
2,
irθ3,
…
,irθ
k
];设置巡检路线ah
i
上需要巡检的第j个航标ir
j
的巡检权重irθ=ε
j
φ
j
,其中,φ
j
为航标ir
j
的历史隐患度,ε
j
为航标ir
j
的位置重要度。10.如权利要求5所述的航标巡检方法,其特征在于,通过航标历史信息库的历史巡检特征,建立神经网络模型,将巡检主机采集到的巡检特征与航标是否失常的判断结果作为输入和输出数据样本(x,y),判断航标是否为失常航标;设置输入d个巡检特征x = [x1; x
2 ;
ꢀ…
; x
d ],对应权重w=[w1; w2;
…
; w d
],设置偏置 b∈r;则可得到输入特征的加权和z,具体公式为:使用relu函数作为激活函数,则有 在多层前馈神经网络中,令,则前馈神经网络通过不断迭代,逐层进行传播公式为: ;复合函数为:其中w和b表示网络中所有层的连接权重和偏置,为神经网络的层数,为第层神经元的个数;为第层到第层的权重矩阵;为第层到第层的偏置;为第层神经元的输出;采用交叉熵损失函数,对于样本(x,y)其损失函数为:其中,为y对应的one
‑
hot向量表示;给定训练集为,将每个样本输入给前置神经网络,得到网络输出为,其在数据集上的风险函数为:其中,是正则化项;λ为长参数,λ越大w越接近于 0,在梯度下降方法的每次迭代中,设置学习率α,得到参数w 和b的更新方式,
计算第l层权重和偏置的梯度,δ
(l) 为第l层的误差项:为第l层的误差项:得到迭代公式:。
技术总结
本申请提供了一种基于无人机遥感的航标巡检系统及其巡检方法,包括控制系统、巡检主机和待巡检的航标;所述控制系统包括航标历史信息库;所述控制系统还包括路线分配模块、航标失常判断模块、失常原因采集模块和路线调整模块;所述路线分配模块用于分配所述巡检主机的巡检路线;所述航标失常判断模块用于通过巡检主机获得的航标信息判断航标是否失常;所述失常原因采集模块用于通过巡检主机对失常航标的失常信息进行采集;路线调整模块用于当巡检主机采集的失常航标的失常信息不能判断其失常原因时,调整巡检路线,使用其他巡检主机对失常航标的失常信息进行采集。本申请提高了巡检效率。巡检效率。巡检效率。
技术研发人员:季克淮 霍虎伟 毛建峰 李铁 李金鹏 李栋
受保护的技术使用者:交通运输部北海航海保障中心天津航标处
技术研发日:2021.11.05
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。