一种ai智能垃圾机器人智能装垃圾袋控制方法及系统
技术领域
1.本发明涉及智能垃圾桶技术领域,特别是一种ai智能垃圾机器人智能装垃圾袋控制方法及系统。
背景技术:
2.智能垃圾桶是将传统的垃圾收集箱和人工智能进行结合后的产物,结合了垃圾收集箱的收集功能和人工智能的特性,形成了自行式智能垃圾桶,使人们的日常生活更加便利。
3.目前智能垃圾桶装垃圾袋过程多是简单地感应式控制或者手工控制等简单的机械操作,人们操作起来很不方便,不能实现ai智能语音控制,且垃圾桶装垃圾袋的过程时间较长,给使用者造成极大的不便。
技术实现要素:
4.本发明的目的是为了解决上述问题,设计了一种ai智能垃圾机器人智能装垃圾袋控制方法及系统。
5.实现上述目的本发明的技术方案为,一种ai智能垃圾机器人智能装垃圾袋控制方法及系统,所述ai智能垃圾机器人包括内桶和外桶,所述ai智能垃圾机器人的底座上设置有马达支架,所述马达支架上设置有驱动马达,所述驱动马达的输出端设置有负压风扇,所述ai智能垃圾机器人的顶盖上设置有连续垃圾盒,所述控制系统包括设置在所述ai智能垃圾机器人的顶盖上的语音感应系统、设置在ai智能垃圾机器人上的ai控制系统,所述ai智能垃圾机器人内设置有感应装置。
6.作为本技术方案的进一步描述,所述ai控制系统包括设置在ai智能垃圾机器人上的ai智能控制模组,所述ai智能控制模组上设置有ai智能控制芯片,ai智能控制芯片控制智能装填系统。
7.作为本技术方案的进一步描述,所述ai智能垃圾机器人的顶盖上设置有语音播放器,所述语音感应系统包括设置在语音播放器一侧的语音感应器。
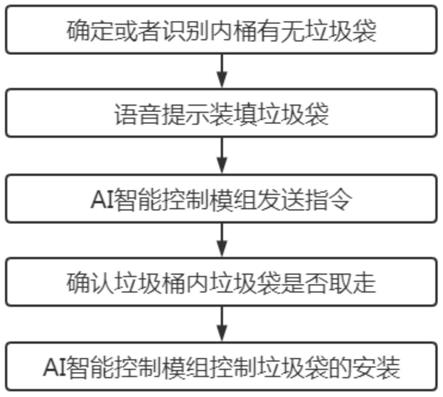
8.作为本技术方案的进一步描述,智能装垃圾袋过程包括以下步骤:
9.步骤一:确定或者识别内桶有无垃圾袋;
10.步骤二:语音提示装填垃圾袋;
11.步骤三:ai智能控制模组发送指令;
12.步骤四:确认垃圾桶内垃圾袋是否取走;
13.步骤五:ai智能控制模组控制垃圾袋的安装。
14.作为本技术方案的进一步描述,所述步骤一中,通过感应装置感应内筒是否有垃圾袋,没有垃圾袋,感应装置则发出信号,将信号传输至下一步骤。
15.作为本技术方案的进一步描述,所述步骤二中,语音感应器收到垃圾袋内无垃圾袋时,开始发出提示装填垃圾袋指令。
16.作为本技术方案的进一步描述,所述步骤三中,ai智能控制模组收到语音提示装填垃圾袋指令时,将装填垃圾袋指令发送至智能装填系统。
17.作为本技术方案的进一步描述,所述步骤四中,通过感应装置确定内桶内的垃圾袋是否取走,取走后即开始下一步骤。
18.作为本技术方案的进一步描述,所述步骤五中,ai智能控制模组发送指令给驱动马达,驱动马达带动负压风扇,在抛物线扇叶上产生高速气流,高速气流在马达支架和内桶之间型腔形成高速龙旋风气流,高速龙旋风气流通过内桶底部的一周气孔在内桶中形成负压空腔,安装在翻盖上的连续垃圾盒收到负压力作用,抽拉连续垃圾盒中的封口垃圾袋连续的进入内桶中,直至垃圾袋到达内桶底部,感应装置感应到垃圾袋后,ai智能控制模组接收到感应后发送指令给驱动马达,停止转动,装袋动作完成。
19.其有益效果在于,本发明提供了ai智能垃圾机器人智能装垃圾袋控制方法及系统,真正实现垃圾袋不需要手动操作或者身体感应,直接ai语音控制实现,减少人们接触垃圾袋和垃圾桶的几率,减少人们接触细菌等的机会,同时减少人们的手工装填垃圾袋的疲劳强度,便捷人们生活。
附图说明
20.图1是本发明的智能装垃圾袋流程图。
具体实施方式
21.首先说明本发明的设计初衷,智能垃圾桶是将传统的垃圾收集箱和人工智能进行结合后的产物,结合了垃圾收集箱的收集功能和人工智能的特性,形成了自行式智能垃圾桶,使人们的日常生活更加便利,目前智能垃圾桶装垃圾袋过程多是简单地感应式控制或者手工控制等简单的机械操作,人们操作起来很不方便,不能实现ai智能语音控制,且垃圾桶装垃圾袋的过程时间较长,给使用者造成极大的不便因此,本发明设计了一种ai智能垃圾机器人智能装垃圾袋控制方法及系统。
22.下面结合附图对本发明进行具体描述,如图1所示,一种ai智能垃圾机器人智能装垃圾袋控制系统,其特征在于,所述ai智能垃圾机器人包括内桶和外桶,所述ai智能垃圾机器人的底座上设置有马达支架,所述马达支架上设置有驱动马达,所述驱动马达的输出端设置有负压风扇,所述ai智能垃圾机器人的顶盖上设置有连续垃圾盒,所述控制系统包括设置在所述ai智能垃圾机器人的顶盖上的语音感应系统、设置在ai智能垃圾机器人上的ai控制系统,所述ai智能垃圾机器人内设置有感应装置,所述ai智能垃圾机器人的底座为排气底座,内桶中的空气在负压风扇抛物线风扇作用下,把空气从底部排气底座排出,降低噪音。
23.下面将详细介绍ai控制系统,所述ai控制系统包括设置在ai智能垃圾机器人上的ai智能控制模组,所述ai智能控制模组上设置有ai智能控制芯片,ai智能控制芯片控制智能装填系统。
24.所述ai智能垃圾机器人的顶盖上设置有语音播放器,所述语音感应系统包括设置在语音播放器一侧的语音感应器。
25.下面将详细介绍ai智能垃圾机器人智能装垃圾袋控制方法,智能装垃圾袋过程包
括以下步骤:
26.步骤一:确定或者识别内桶有无垃圾袋,在所述步骤一中,通过感应装置感应内筒是否有垃圾袋,没有垃圾袋,感应装置则发出信号,将信号传输至下一步骤;
27.步骤二:语音提示装填垃圾袋,在所述步骤二中,语音感应器收到垃圾袋内无垃圾袋时,开始发出提示装填垃圾袋指令;
28.步骤三:ai智能控制模组发送指令,在所述步骤三中,ai智能控制模组收到语音提示装填垃圾袋指令时,将装填垃圾袋指令发送至智能装填系统;
29.步骤四:确认垃圾桶内垃圾袋是否取走,在所述步骤四中,通过感应装置确定内桶内的垃圾袋是否取走,取走后即开始下一步骤;
30.步骤五:ai智能控制模组控制垃圾袋的安装,在所述步骤五中,ai智能控制模组发送指令给驱动马达,驱动马达带动负压风扇,在抛物线扇叶上产生高速气流,高速气流在马达支架和内桶之间型腔形成高速龙旋风气流,高速龙旋风气流通过内桶底部的一周气孔在内桶中形成负压空腔,安装在翻盖上的连续垃圾盒收到负压力作用,抽拉连续垃圾盒中的封口垃圾袋连续的进入内桶中,直至垃圾袋到达内桶底部,感应装置感应到垃圾袋后,ai智能控制模组接收到感应后发送指令给驱动马达,停止转动,装袋动作完成。
31.ai智能控制模组同时根据电量的高低发送不同的指令给驱动马达,控制风扇的转速和风量保持在一定的范围内,确保垃圾袋的完全装填,装填完成后智能感应模组发送指令给控制模组,使收纳机器处于可使用状态,真正实现垃圾袋不需要手动操作或者身体感应,直接ai语音控制实现,减少人们接触垃圾袋和垃圾桶的几率,减少人们接触细菌等的机会,同时减少人们的手工装填垃圾袋的疲劳强度,便捷人们生活。
32.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。