1.本发明涉及具备通过线性模块驱动滑动件的机构的线性输送机系统。
背景技术:
2.在专利文件1中公开了并列配置有在规定的驱动方向上驱动移动体的多条轨道的线性驱动输送系统。该系统设置有在多条轨道之间移载移动体的接合轨道。该接合轨道与一个轨道相对,并且能够执行从一个轨道接收移动体或者与此相反的动作。
3.现有技术文献
4.专利文献
5.专利文献1:us2016/0159585a1
技术实现要素:
6.发明所要解决的课题
7.这样,专利文献1所记载的系统为了在并列设置的多个固定线性模块(轨道)之间移载滑动件(可动体)使用可动线性模块。在这样的系统中,当执行使滑动件在固定线性模块与可动线性模块之间移动的交接动作时有产生如下课题的情况。
8.即,滑动件的交接动作能够通过对于固定线性模块以及可动线性模块所驱动的滑动件的位置控制而执行。该位置控制基于对固定线性模块以及可动线性模块分别设定的坐标轴而执行。然而存在由于对与交接动作相关的各个线性模块设定的坐标轴不连续,所以不能基于这些坐标轴进行位置控制,从而不能执行滑动件的交接动作的情况。
9.本发明是鉴于上述课题而完成的,其目的在于,提供一种能够抑制由于对固定线性模块以及可动线性模块分别设定的坐标轴的不连续性而不能执行使滑动件在它们之间移动的交接动作的状况的发生的技术。
10.用于解决课题的技术方案
11.本发明涉及的一种线性输送机系统,其中,具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在第1方向上驱动滑动件,所述多个相对范围从第1方向与多个固定线性模块相对,并在第2方向上排列;滑动件移载机构,在多个相对范围之间输送可动线性模块;以及控制部,对多个固定线性模块以及可动线性模块分别设定坐标轴,并对于由固定线性模块以及可动线性模块驱动的滑动件执行基于坐标轴的位置控制,所述坐标轴通过与第1方向上的位置的变化相应地变化的坐标值来表示第1方向上的位置,滑动件能够从第1方向的一端相对于固定线性模块以及可动线性模块卡合及脱离,固定线性模块以及可动线性模块在第1方向上驱动卡合的滑动件,执行使滑动件在固定线性模块与可动线性模块之间移动的交接动作,控制部执行判断作为固定线性模块的坐标轴的一个坐标轴与作为可动线性模块的坐标轴的另一个坐标轴在第1方向上是否连续的判断处理,当执行判断处理的结果是在交接
动作之前判断为一个坐标轴与另一个坐标轴不连续时,代替位置控制,而通过速度控制来控制交接动作中的滑动件的驱动,所述速度控制是基于速度指令值来控制滑动件的速度的控制。
12.本发明涉及的一种线性输送机系统的控制方法,线性输送机系统具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在第1方向上驱动滑动件,所述多个相对范围从第1方向与多个固定线性模块相对,并在第2方向上排列;以及滑动件移载机构,在多个相对范围之间输送可动线性模块,其中,所述线性输送机系统的控制方法包括以下步骤:对多个固定线性模块以及可动线性模块分别设定坐标轴,所述坐标轴通过与第1方向上的位置的变化相应地变化的坐标值来表示第1方向上的位置;执行判断作为固定线性模块的坐标轴的一个坐标轴与作为可动线性模块的坐标轴的另一个坐标轴在第1方向上是否连续的判断处理;以及当判断处理的结果是判断为一个坐标轴与另一个坐标轴不连续时,通过速度控制来执行使滑动件在固定线性模块与可动线性模块之间移动的交接动作,所述速度控制是基于速度指令值来控制滑动件的速度的控制。
13.本发明涉及的一种线性输送机系统的控制程序,线性输送机系统具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在第1方向上驱动滑动件,所述多个相对范围从第1方向与多个固定线性模块相对,并在第2方向上排列;以及滑动件移载机构,在多个相对范围之间输送可动线性模块,其中,所述线性输送机系统的控制程序使计算机执行以下步骤:对多个固定线性模块以及可动线性模块分别设定坐标轴,所述坐标轴通过与第1方向上的位置的变化相应地变化的坐标值来表示第1方向上的位置;执行判断作为固定线性模块的坐标轴的一个坐标轴与作为可动线性模块的坐标轴的另一个坐标轴在第1方向上是否连续的判断处理;以及当判断处理的结果是判断为一个坐标轴与另一个坐标轴不连续时,通过速度控制来执行使滑动件在固定线性模块与可动线性模块之间移动的交接动作,所述速度控制是基于速度指令值来控制滑动件的速度的控制。
14.本发明涉及的一种记录介质,以能够由计算机读取的方式记录上述的线性输送机系统的控制程序。
15.在这样构成的本发明(线性输送机系统,线性输送机系统的控制方法,线性输送机系统的控制程序以及记录介质)中执行使滑动件在固定线性模块与可动线性模块之间移动的交接动作。此时,执行判断作为固定线性模块的坐标轴的一个坐标轴与作为可动线性模块的坐标轴的另一个坐标轴在第1方向上是否连续的判断处理。并且,在判断处理中,当在交接动作之前判断为一个坐标轴与另一个坐标轴不连续时,执行基于速度指令值来控制滑动件的速度的速度控制(而不是位置控制)并且执行交接动作。因此,能够抑制由于对固定线性模块以及可动线性模块分别设定的坐标轴的不连续性而不能执行使滑动件在它们之间移动的交接动作的状况的发生。
16.具体来讲,线性输送机系统也可以构成为在位置控制中,控制部通过基于位置指令值与位置检测值之间的偏差的反馈控制来驱动滑动件,所述位置指令值是基于表示滑动件的位置的时间变化的位置曲线而生成的,所述位置检测值是检测滑动件的位置而得到的,另一方面,在速度控制中,控制部通过基于速度指令值与速度检测值之间的偏差的反馈
控制来驱动滑动件,所述速度指令值是根据表示滑动件的速度的时间变化的速度曲线而生成的,所述速度检测值是检测滑动件的速度而得到的。这样,通过位置曲线以及速度曲线能够准确地执行滑动件的位置控制以及速度控制。
17.另外,线性输送机系统也可以构成为控制部在使滑动件从移动开始位置朝向移动目标位置移动的交接动作中完成速度控制时,通过位置控制使滑动件从速度控制完成时滑动件停止的停止位置移动到移动目标位置。在该构成中,能够将在完成速度控制时残留的稳定偏差(即停止位置与移动目标位置之间的差)通过位置控制而消除,从而能够将滑动件可靠地移动到移动目标位置。
18.另外,线性输送机系统也可以构成为控制部在执行判断处理的结果是在交接动作之前判断为一个坐标轴与另一个坐标轴连续时,通过位置控制而控制交接动作中的滑动件的驱动。在该构成中,当在判断处理判断为坐标轴连续的情况下,通过位置控制执行滑动件的交接动作,当在判断处理判断为坐标轴不连续的情况下,通过速度控制执行滑动件的交接动作。因此,能够抑制由于对固定线性模块以及可动线性模块分别设定的坐标轴的不连续性而不能执行使滑动件在它们之间移动的交接动作的状况的发生。
19.线性输送机系统也可以构成为控制部以多个固定线性模块以及可动线性模块各自的坐标轴表示的坐标值互不重复的方式设定坐标轴。在该构成中,能够基于不重复的坐标轴,换言之即是唯一地表示在第1方向上的位置的坐标轴而准确地进行对于滑动件的控制。
20.另外,线性输送机系统也可以构成为坐标轴通过与第1方向上的位置的变化相应地以规定的斜率线性地变化的坐标值来表示第1方向上的位置。此时,线性输送机系统也可以构成为控制部在一个坐标轴中的另一个坐标轴侧的端部的坐标值和另一个坐标轴中的一个坐标轴侧的端部的坐标值之间的斜率与规定的斜率不同的情况下,判断为一个坐标轴与另一个坐标轴不连续。由此,能够简便地判断坐标轴的连续性。
21.发明效果
22.根据本发明能够抑制由于对固定线性模块以及可动线性模块分别设定的坐标轴的不连续性而不能执行使滑动件在它们之间移动的交接动作的状况的发生。
附图说明
23.图1是表示本发明的线性输送机系统所具备的线性模块的一例的立体图。
24.图2是局部露出地表示图1的线性模块的内部的立体图。
25.图3是示意地表示本发明的线性输送机系统的一例的图。
26.图4是表示图3的线性输送机系统所具备的电构成的一例的框图。
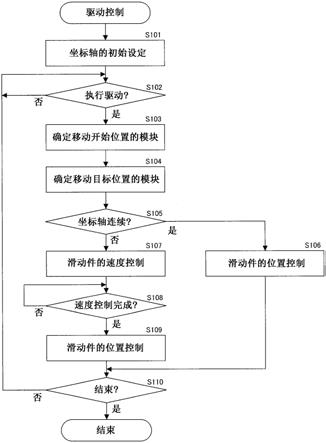
27.图5是表示在图3所示的线性输送机系统中执行的驱动控制的一例的流程图。
28.图6是示意地表示在图5所示的驱动控制中执行的初始设定的一例的图。
29.图7是示意地表示在图5所示的驱动控制中执行的初始设定的一例的图。
30.图8是示意地表示在图5所示的驱动控制中执行的交接动作的一例的图。
31.图9是示意地表示在图5的驱动控制所用的位置
·
速度曲线的一例的图。
具体实施方式
32.图1是表示本发明的线性输送机系统所具备的线性模块的一例的立体图,图2是局部露出地表示图1的线性模块的内部的立体图。在图1及图2中标记有具有平行于水平方向的x方向,正交于x方向且平行于水平方向的y方向以及平行于铅垂方向的z方向的xyz正交坐标轴。进一步来讲,沿着x方向将两图的右斜上侧标记为x1侧,沿着x方向将两图的左斜下侧标记为x2侧。同样的标记在以下的图中也被适当地使用。该线性模块例如具备与wo2018/055709a1所记载的线性输送机装置的模块相同的基本构成。在此,在进行了线性模块的说明之后再进行线性输送机系统的整体的说明。
33.在图1及图2中示出了在x方向上延伸设置的线性模块m,从下侧支持线性模块m的基座部件3以及卡合于线性模块m的滑动件4。线性模块m安装于在x方向上等间隔地排列的三个基座部件3的上端,并通过磁力在x方向上驱动滑动件4。在此处的例子中,线性模块m由在x方向上排列的2个模块单元20构成。但是,构成线性模块m的模块单元20的个数不限于2个,也可以是1个或者3个以上。
34.模块单元20具有在x方向延伸设置的基板21。基板21是从z方向俯视时具有矩形状的平板。在基板21的上面,在x方向平行的两条导轨22在y方向隔开间隔配置。进一步来讲,在基板21的上面安装有以规定的排列间隔p23在x方向排成一排的多个线性马达定子23以及以规定的排列间隔p24在x方向排成一排的多个磁传感器24。在此,比起线性马达定子23的排列间距p23,磁传感器24的排列间距p24更长。在y方向上,多个线性马达定子23配置于两条导轨22之间,多个磁传感器24配置于线性马达定子23与一条导轨22之间。
35.线性马达定子是由线圈以及插入该线圈的芯构成的电磁铁。另一方面,在滑动件4设置有由永磁铁以及保持该永磁铁的背轭构成的可动元件。线性马达定子23通过产生与所施加的电流相对应的磁通量而给予滑动件4的可动元件磁推进力,从而在x方向上驱动滑动件4。另外,在滑动件4安装有示出x方向上的位置的磁标尺,磁传感器24通过读取磁标尺而检测滑动件4的x方向上的位置。并且如下文所述,通过基于磁传感器24检测到的滑动件4的位置而对施加于线性马达定子23的电流进行反馈控制,从而在x方向上驱动滑动件4。
36.另外,模块单元20具有从上侧覆盖这些导轨22,线性马达定子23以及磁传感器24并且在俯视时是矩形状的盖部件25。盖部件25具有在y方向的中央向下方突出的支承腿251,且支承腿251安装于基板21的上面。在y方向的两端,在盖部件25与基板21之间形成有间隙,从该间隙进入盖部件25与基板21之间的滑动件4的两端部分别卡合于两条导轨22。
37.通过将这样的模块单元20在x方向上排列多个(两个)而构成线性模块m。该线性模块m在俯视时具有矩形状。线性模块m的两个模块单元20中x1侧的模块单元20架设于三个基座部件3中x1侧的端部的基座部件3与中央的基座部件3之间,x2侧的模块单元20架设于三个基座部件3中x2侧的端部的基座部件3与中央的基座部件3之间。
38.滑动件4能够在x方向上从线性模块m的端部进入到线性模块m的中央侧,而卡合于线性模块m的导轨22。这样,卡合于导轨22的滑动件4由线性模块m在x方向上被驱动。另外,滑动件4能够在x方向上从线性模块m的端部向外侧脱落而从线性模块m的导轨22脱离。
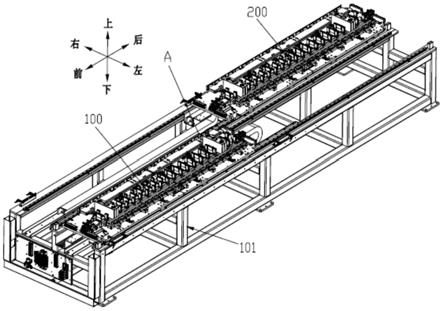
39.图3是示意地表示本发明的线性输送机系统一例的图。线性输送机系统1具备5台线性模块m。另外,在该图中对于5台线性模块m赋予了互不相同的标号m1、m2、m3、m4、m5。
40.线性模块m2、m3、m4是固定于线性输送机系统1的设置面的固定线性模块,线性模
块m1、m5是能够相对于设置面在y方向上移动的可动线性模块。固定线性模块m2、m3、m4与可动线性模块m1、m5在y方向上具有相同的宽度,另一方面在x方向上具有不同的长度。但是它们除了在x方向上的长度以外具有在图1及图2所示的共通的基本构成。
41.三个固定线性模块m2、m3、m4在y方向隔开间隔并且在x方向平行配置。这样在x方向上并列配置的固定线性模块m2、m3、m4在x方向上具有相同的长度。另一方面,可动线性模块m1、m5在x方向上具有比固定线性模块m2、m3、m4短的相同的长度。但是,固定线性模块m2、m3、m4以及可动线性模块m1、m5的尺寸关系不限于这个例子。
42.该线性输送机系统1具有在y方向上驱动可动线性模块m1、m5的两个致动器5a、5b。致动器5a在固定线性模块m2、m3、m4的x方向的x2侧平行于y方向配置。致动器5b在固定线性模块m2、m3、m4的x方向的x1侧平行于y方向配置。这样,两个致动器5a、5b配置为从x方向夹着三个固定线性模块m2、m3、m4。
43.致动器5a例如是平行于y方向的具备滚珠丝杠的单轴机械手,可动线性模块m1安装于致动器5a的滚珠丝杠的螺母。该致动器5a沿着可动区域ra在y方向上驱动可动线性模块m1。在此,可动区域ra包括在x方向上从x2侧与固定线性模块m2的x2侧的端部相对的相对范围fa2、在x方向上从x2侧与固定线性模块m3的x2侧的端部相对的相对范围fa3以及在x方向上从x2侧与固定线性模块m4的x2侧的端部相对的相对范围fa4,并且是在y方向上延伸的区域。相对范围fa2相当于与固定线性模块m2在x方向上排成一排的可动线性模块m1的存在范围(包括可动线性模块m1的公差),相对范围fa3相当于与固定线性模块m3在x方向上排成一排的可动线性模块m1的存在范围(包括可动线性模块m1的公差),相对范围fa4相当于与固定线性模块m4在x方向上排成一排的可动线性模块m1的存在范围(包括可动线性模块m1的公差)。
44.致动器5b例如是平行于y方向的具备滚珠丝杠的单轴机械手,可动线性模块m5安装于致动器5b的滚珠丝杠的螺母。该致动器5b沿着可动区域rb在y方向上驱动可动线性模块m5。在此,可动区域rb包括在x方向上从x1侧与固定线性模块m2的x2侧的端部相对的相对范围fb2、在x方向上从x1侧与固定线性模块m3的x1侧的端部相对的相对范围fb3以及在x方向上从x1侧与固定线性模块m4的x1侧的端部相对的相对范围fb4,并且是在y方向上延伸的区域。相对范围fb2相当于与固定线性模块m2在x方向上排成一排的可动线性模块m5的存在范围(包括可动线性模块m5的公差),相对范围fb3相当于与固定线性模块m3在x方向上排成一排的可动线性模块m5的存在范围(包括可动线性模块m5的公差),相对范围fb4相当于与固定线性模块m4在x方向上排成一排的可动线性模块m4的存在范围(包括可动线性模块m5的公差)。
45.在这样的线性输送机系统1中能够循环地驱动滑动件4。例如在可动线性模块m5位于相对范围fb2内的状态下,通过固定线性模块m2将与之卡合的滑动件4驱动到x方向的x1侧,能够将滑动件4从固定线性模块m2移动到可动线性模块m5。然后,在致动器5b将可动线性模块m5从相对范围fb2移动到相对范围fb4之后,通过位于相对范围fb4内的可动线性模块m5将与之卡合的滑动件4驱动到x方向的x2侧,能够将滑动件4从可动线性模块m5移动到固定线性模块m4。
46.进而,在可动线性模块m1位于相对范围fa4内的状态下,通过固定线性模块m4将与之卡合的滑动件4驱动到x方向的x2侧,能够将滑动件4从固定线性模块m4移动到可动线性
模块m1。然后,在致动器5a将可动线性模块m1从相对范围fa4移动到相对范围fa2之后,通过位于相对范围fa2内的可动线性模块m1将与之卡合的滑动件4驱动到x方向的x1侧,能够将滑动件4从可动线性模块m1移动到固定线性模块m2。
47.这样能够顺时针地循环驱动滑动件4。另外,通过执行与上述相反的动作能够逆时针地循环驱动滑动件4。进而,该循环驱动不限于固定线性模块m2与固定线性模块m4之间,在固定线性模块m2与固定线性模块m3之间,或者固定线性模块m3与固定线性模块m4之间也能够同样地执行。另外,循环驱动只是在线性输送机系统1能够执行的滑动件4的驱动方式的一个例子,也可以以其他各种各样的方式驱动滑动件4。
48.图4是表示图3的线性输送机系统所具备的电构成的一例的框图。线性输送机系统1监视系统整体并且具备控制各滑动件4的位置的控制装置11。该控制装置11例如是个人计算机等的计算机。
49.控制装置11具备控制部12,存储部13以及显示器14。控制部12例如是由cpu(central processing unit:中央处理器)构成的处理器,负责在控制装置11中的运算。存储部13例如由hdd(hard disk drive:硬盘驱动器)构成,存储在控制装置2中的运算所使用的数据或者程序。特别是,存储部13存储使控制装置11的控制部12执行后述的图5的驱动控制的程序18。该程序18可以由usb(universal serial bus:通用串行总线)存储器等记录介质19以能够由控制装置11读取的状态提供而安装于存储部13,也可以从互联网服务器下载而安装于存储部13。显示器14例如是触摸面板显示器,不仅是进行对用户的显示,还作为接受来自用户的输入操作的ui(user interface:用户界面)而起作用。
50.该控制装置11的控制部12通过基于磁传感器24所检测的滑动件4的位置来反馈控制线性马达定子23,而使每个线性模块m1~m5驱动滑动件4。另外,每个致动器5a、5b具有使滚珠丝杠旋转的伺服电机51以及检测伺服电机51的旋转位置的编码器52,控制部12通过基于编码器52检测的旋转位置来反馈控制伺服电机51,而使每个致动器5a、5b驱动可动线性模块m1、m5。
51.该控制部12通过对于各滑动件4选择性地执行位置控制和速度控制而控制滑动件4的驱动。具体来讲,控制部12通过执行基于由线性模块m1~m5的磁传感器24检测滑动件4的位置而得到的位置检测值dp与位置指令值ip(图9)之间的偏差而控制对可动线性模块m1~m5的线性马达定子23供给的电流的反馈控制来控制滑动件4的位置(位置控制)。另外,控制部12通过执行基于由线性模块m1~m5的磁传感器24检测滑动件4的速度而得到的速度检测值dv与速度指令值iv(图9)之间的偏差而控制对可动线性模块m1~m5的线性马达定子23供给的电流的反馈控制来控制滑动件4的速度(速度控制)。
52.特别是在本实施方式中,能够使可动线性模块m1、m5位于与排列配置的多个固定线性模块m2、m3、m4中的一个固定线性模块相对的相对范围并且执行使滑动件4在一个固定线性模块与可动线性模块m1、m5之间移动的交接动作。该交接动作以如下的方式进行控制。
53.图5是表示在图3所示的线性输送机系统中执行的用于交接动作的驱动控制的一例的流程图,图6以及图7是示意地表示在图5所示的驱动控制中执行的初始设定的一例的图,图8是示意地表示在图5所示的驱动控制中执行的交接动作的一例的图,图9是示意地表示在图5的驱动控制所用的位置
·
速度曲线的一例的图。图5的流程图由控制部12根据程序18执行。
54.在步骤s101中对线性模块m1~m5分别设定坐标轴a1~a5(坐标轴的初始设定)。坐标轴a1~a5具有根据从x方向的x1侧朝向x2侧的位置变化线性地(即以恒定的斜率sl)增加的位置坐标值p,且对线性模块m1~m5单独地设定。具体来讲如图6所示,可动线性模块m1~m5以该顺序通过配线w串联连接,且从控制装置11向这些线性模块m1~m5中信号路径的最上游的线性模块m1发送坐标设定指令。接受到坐标设定指令的线性模块m1对自己设定具有在x方向上从x1侧的端部朝向x2侧的端部线性地以斜率sl增加的“0~20”的位置坐标值p的坐标轴a1。当完成坐标轴a1的设定时,线性模块m1将位置坐标值p的最大值(=20)和坐标设定指令一并发送给线性模块m2。接受到坐标设定指令的线性模块m2对自己设定具有在x方向上从x1侧的端部朝向x2侧的端部线性地以斜率sl增加的“21~120”的位置坐标值p的坐标轴a2。同时,对线性模块m2设定的位置坐标值p的最小值(换言之即是,最初的值)是连续地接着从上游侧的线性模块m1接收的位置坐标值p的最大值的值。当完成坐标轴a2的设定时,线性模块m2将位置坐标值p的最大值(=120)和坐标设定指令一并发送给线性模块m3。
55.通过重复这些,分别
56.·
对于线性模块m1设定具有“0~20”的位置坐标值p的坐标轴a1
·
对于线性模块m2设定具有“21~120”的位置坐标值p的坐标轴a2
·
对于线性模块m3设定具有“121~220”的位置坐标值p的坐标轴a3
57.·
对于线性模块m4设定具有“221~320”的位置坐标值p的坐标轴a4
58.·
对于线性模块m1设定具有“321~340”的位置坐标值p的坐标轴a5。
59.另外,关于位置坐标值p相对于x方向上的位置的变化而变化的变化率,即斜率,在坐标轴a1~a5中相同。
60.由此,能够以坐标轴a1~a5被设定为多个线性模块m的分别的坐标轴a1~a5所示出的位置坐标值p互不重复的初始设定状态si执行滑动件4的驱动控制。这样在完成坐标轴的初始设定时,确认是否为了交接动作而执行滑动件4的驱动(步骤s102)。当在步骤s102判断为执行滑动件4的驱动(yes:是)时,确定设定有滑动件4的移动开始位置ls(即现在位置)所属的坐标轴a的线性模块m(换言之即是,停在移动开始位置ls的滑动件4所卡合的线性模块m)(步骤s103)。另外,确定设定有滑动件4的移动目标位置ld所属的坐标轴a的线性模块m(换言之即是,到达移动目标位置ld的滑动件4所卡合的线性模块m)(步骤s104)。
61.然后,判断在步骤s103确定的移动开始位置ls所属的线性模块m的坐标轴a与在步骤s104确定的移动目标位置ld所属的线性模块m的坐标轴a的连续性(步骤s105)。具体来讲,在将移动开始位置ls所属的线性模块m的坐标轴a的移动目标位置ld侧的端部的位置坐标值p与移动目标位置ld所属的线性模块m的坐标轴a的移动开始位置ls侧的端部的位置坐标值p连接的直线的斜率slb,与表示在坐标轴a(a1~a5)的位置坐标值p的变化率的斜率sl一致的情况下判断为连续,不是这样的情况则判断为不连续。
62.例如,在从固定线性模块m4向与该固定线性模块m4相对的可动线性模块m5(即位于相对位置fb4内的可动线性模块m5)驱动滑动件4的情况下,固定线性模块m4的坐标轴a4与可动线性模块m5的坐标轴a5连续。因此,在步骤s105中坐标轴a4与坐标轴a5被判断为连续(yes:是),从而在步骤s106执行滑动件4的位置控制。
63.在该步骤s106中,基于具有“220~340”的连续的位置坐标值p的坐标轴a4、a5生成图9的位置曲线fp。在图9的曲线图中,横轴表示时间,左侧的纵轴表示在坐标轴中的滑动件
4的位置。如该图所示,位置曲线fp表示从移动开始位置ls移动到移动目标位置ld的滑动件4的位置(换言之即是位置指令值ip)的时间变化。并且,基于在该位置曲线fp所示的各时刻t的位置指令值ip与检测滑动件4的位置的磁传感器24所得到的位置检测值dp之间的偏差(=ip
‑
dp)来反馈控制滑动件4的位置。这样,执行使滑动件4的位置追随位置指令值ip的伺服控制。然后,当滑动件4到达移动目标位置ld时,判断是否结束驱动控制(步骤s110)。
64.另一方面,在图8的“交接动作c”的栏所示的驱动方式中,滑动件4从属于固定线性模块m2的坐标轴a2的移动开始位置ls被驱动到属于与该固定线性模块m2相对的可动线性模块m5(即位于相对位置fb2内的可动线性模块m5)的坐标轴a5的移动目标位置ld。在这个情况下,如图8的“坐标轴”的栏所示,固定线性模块m2的坐标轴a2与可动线性模块m5的坐标轴a5不连续,并且坐标轴a2的坐标轴a5侧的端部e2的位置坐标值p与坐标轴a5的坐标轴a2侧的端部e5的位置坐标值p之间存在间隙g。因此在步骤s105中判断为坐标轴a2与坐标轴a5不连续(no:否)并进入步骤s107。
65.具体来讲在交接动作c的例子中,计算在坐标轴a2(一个坐标轴)的坐标轴a5(另一个坐标轴)侧的端部e2的坐标值p2(x2、y2)和在坐标轴a5(另一个坐标轴)的坐标轴a2(一个坐标轴)侧的端部e5的坐标值p5(x5、y5)之间的斜率slb(=(y5
‑
y2)/(x5
‑
x2))。并且,判断斜率slb与各坐标轴a2、a5中的上述斜率sl相同还是不同。在该例中,由于斜率slb与斜率sl不同,所以坐标轴a2与坐标轴a5被判断为不连续。
66.在步骤s107中生成图9的速度曲线fv。在图9的曲线图中横轴表示时间,右侧的纵轴表示在坐标轴中的滑动件4的速度。如该图所示,速度曲线fv表示从移动开始位置ls朝向移动目标位置ld移动的滑动件4的速度(换言之即是速度指令值iv)的时间变化。但是,该速度控制具有稳定偏差,在速度控制完成时,滑动件4停止于移动目标位置ld的附近的停止位置la。并且,基于在该速度曲线fv所示的各时刻t的速度指令值iv与检测滑动件4的速度的磁传感器24所得到的速度检测值dv之间的偏差(=iv
‑
dv)来反馈控制滑动件4的速度。这样,执行使滑动件4的速度追随速度指令值iv的伺服控制。
67.在步骤s108中判断滑动件4的速度控制是否完成,换言之,滑动件4是否停止。并且,当判断为滑动件4停止并且滑动件4的速度控制完成时(在步骤s108为“yes:是”),对该滑动件4执行位置控制(步骤s109)。即如上所述,通过速度控制被移动的滑动件4的停止位置la与移动目标位置ld之间有稳定偏差残留。在此,控制部12通过位置控制将滑动件4从在交接动作c中的速度控制完成时滑动件4停止的停止位置la移动到移动目标位置ld。另外,通过伴随着交接动作c的速度控制,滑动件4的位置从固定线性模块m2移动到可动线性模块m5。即,滑动件4的位置控制由用于交接动作的固定线性模块m2和可动线性模块m5中基于交接动作的滑动件4的移动目的地的可动线性模块m5单独执行。因此,坐标轴a2、a5的不连续性在该位置控制中不构成问题。然后,在完成位置控制并且滑动件4到达移动目标位置ld时,判断是否结束驱动控制(步骤s110)。
68.在不结束驱动控制的情况(在步骤s110为“no:否”的情况)下返回步骤s102,另一方面,在结束驱动控制的情况(在步骤s110为“yes:是”的情况)下则结束图5的流程图。
69.这样,控制部12根据坐标轴的连续性而选择性地使用位置控制和速度控制。具体来讲,控制部12在位置控制(步骤s106)中,通过基于位置指令值ip与位置检测值dp之间的偏差的反馈控制来驱动滑动件4,位置指令值ip是基于表示滑动件4的位置的时间变化的位
置曲线fp而生成的,位置检测值dp是检测滑动件4的位置而得到的。另一方面,在速度控制(步骤s107)中,通过基于速度指令值iv与速度检测值dv之间的偏差的反馈控制来驱动滑动件4,速度指令值iv是基于表示滑动件4的速度的时间变化的速度曲线fv而生成的,速度检测值dv是检测滑动件4的速度而得到的。
70.在以上所示的例子中,使可动线性模块m5位于与并列配置的多个线性模块m1~m5中的一个固定线性模块m2相对的相对范围fb2并且执行使滑动件在一个固定线性模块m2与可动线性模块m5之间移动的交接动作c。此时,执行判断一个固定线性模块m2的坐标轴a2(一个坐标轴)与可动线性模块m5的坐标轴a5(另一个坐标轴)在x方向上是否连续的判断处理(步骤s105)。并且,在判断处理中,当在交接动作c之前判断为坐标轴a2与坐标轴a5不连续时,对于滑动件4执行速度控制(而不是位置控制)并且执行交接动作c(步骤s107)。因此,能够抑制由于对可动线性模块m1以及可动线性模块m5分别设定的坐标轴a2、a5的不连续性而不能执行使滑动件4在它们之间移动的交接动作c的状况的发生。
71.另外,控制装置11当在使滑动件4从移动开始位置ls向移动目标位置ld移动的交接动作c中完成速度控制(步骤s107、s108)时,通过位置控制使滑动件4从速度控制完成时滑动件4停止的停止位置la移动到移动目标位置ld为止(步骤s109)。在该构成中,能够将在完成速度控制时残留的稳定偏差(即停止位置la与移动目标位置ld之间的差)通过位置控制而消除,从而能够将滑动件4可靠地移动到移动目标位置ld。
72.另外,控制装置11执行判断处理(步骤s105)的结果是在交接动作c之前判断为坐标轴a4(一个坐标轴)与坐标轴a5(另一个坐标轴)连续时(在步骤s105为“yes:是”),通过位置控制而控制交接动作c中的滑动件4的驱动并且执行交接动作c(步骤s106)。即,当在判断处理(步骤s105)判断为移动开始位置ls以及移动目标位置ld分别属于的坐标轴连续的情况下,通过位置控制执行滑动件4的交接动作,当在判断处理(步骤s105)判断为这些坐标轴不连续的情况下,通过速度控制执行滑动件4的交接动作。因此,能够抑制由于对固定线性模块m2、m3、m4以及可动线性模块m1、m5分别设定的坐标轴a2、a3、a4、a1、a5的不连续性而不能执行使滑动件4在它们之间移动的交接动作的状况的发生。
73.另外,控制装置11以多个固定线性模块m2、m3、m4以及可动线性模块m1、m5各自的坐标轴a2、a3、a4、a1、a5表示的位置坐标值p互不重复的方式设定位置坐标值p。在该构成中,能够基于不重复的坐标轴a2、a3、a4、a1、a5,换言之即是唯一地表示在x方向上的位置的坐标轴a2、a3、a4、a1、a5准确地进行对于滑动件4的控制。
74.另外,坐标轴a1~a5通过与x方向上的位置的变化相应地以规定的斜率线性地变化的位置坐标值p来表示x方向上的位置。并且在上述的例子中,控制装置11在坐标轴a2中的坐标轴a5侧的端部e2的位置坐标值p和坐标轴a5中的坐标轴a2侧的端部e5的位置坐标值p之间的斜率与在各坐标轴a1~a5的位置坐标值p的斜率不同的情况下,判断为坐标轴a2与坐标轴a5不连续。由此,能够简便地判断坐标轴a2、a5的连续性。
75.这样在本实施方式中,线性输送机系统1相当于本发明的“线性输送机系统”的一例,控制装置11相当于本发明的“控制部”的一例,程序18相当于本发明的“线性输送机系统的控制程序”的一例,记录介质19相当于本发明的“记录介质”的一例,滑动件4相当于本发明的“滑动件”的一例,坐标轴a1~a5相当于本发明的“坐标轴”的一例,坐标轴a2相当于本发明的“一个坐标轴”的一例,坐标轴a5相当于本发明的“另一个坐标轴”的一例,位置坐标
值p相当于本发明的“坐标值”的一例,交接动作c相当于本发明的“交接动作”的一例,相对范围fa2~fa4、fb2~fb4相当于本发明的“相对范围”的一例,固定线性模块m2、m3、m4相当于本发明的“固定线性模块”的一例,固定线性模块m2相当于本发明的“一个固定线性模块”的一例,可动线性模块m1、m5相当于本发明的“可动线性模块”的一例,可动线性模块m1与致动器5a所构成的滑动件移载机构ta以及可动线性模块m5与致动器5b所构成的滑动件移载机构tb分别相当于本发明的“滑动件移载机构”的一例,移动开始位置ls相当于本发明的“移动开始位置”的一例,移动目标位置ld相当于本发明的“移动目标位置”的一例,x方向相当于本发明的“第1方向”的一例,y方向相当于本发明的“第2方向”的一例,位置曲线fp相当于本发明的“位置曲线”的一例,位置指令值ip相当于本发明的“位置指令值”的一例,位置检测值dp相当于本发明的“位置检测值”的一例,速度曲线fv相当于本发明的“速度曲线”的一例,速度指令值iv相当于本发明的“速度指令值”的一例,速度检测值dv相当于本发明的“速度检测值”的一例。
76.另外,本发明不限于上述实施方式,只要不脱离其主旨,可以对上述实施方式进行各种变更。例如,在交接动作中适用速度控制的可动线性模块与固定线性模块的组合不限于上述的例子。即当以可动线性模块m1与固定线性模块m3的组合,可动线性模块m1与固定线性模块m4的组合,可动线性模块m5与固定线性模块m2的组合以及可动线性模块m5与固定线性模块m3的组合进行交接动作时,执行速度控制即可。进而,在交接动作中滑动件4移动的方向也可以是从可动线性模块m1到固定线性模块m3。对于其他组合也是同样的。
77.另外,以初始设定状态si的坐标轴a1~a5的设定方式不限于上述的例子,例如,也可以将位置坐标值p设定为位置坐标值p以坐标轴a5、a4、a3、a2、a1的顺序增加。
78.另外,排列固定线性模块m2、m3、m4的方向不限于y方向(水平方向),也可以是z方向(铅垂方向)。在这个情况下,致动器5a、5b在z方向上使可动线性模块m1、m5升降。
79.另外,也可以适当变更固定线性模块或者可动线性模块的个数或配置。因此也可以排除固定线性模块m3。另外,线性输送机系统1也可以构成为使滑动件4在由一个固定线性模块m2和驱动可动线性模块m1的一个致动器5a构成的l字状的路径上移动。或者也可以从图3的状态将固定线性模块m4在x方向上平行地移动,配置于相对于致动器5b的固定线性模块m2、m3的相反侧。
80.另外,固定线性模块ma、2b驱动滑动件4的方向与致动器5c、5d驱动滑动件4的方向没有必要必须正交,也可以倾斜。
81.标号说明
[0082]1……
线性输送机系统
[0083]
11
……
控制装置(控制部)
[0084]
18
……
程序(线性输送机系统的控制程序)
[0085]
19
……
记录介质
[0086]4……
滑动件
[0087]
a1
……
坐标轴
[0088]
a2
……
坐标轴(一个坐标轴)
[0089]
a3
……
坐标轴
[0090]
a4
……
坐标轴
[0091]
a5
……
坐标轴(另一个坐标轴)
[0092]
p
……
位置坐标值(坐标值)
[0093]
e2
……
另一个坐标轴侧的端部
[0094]
p2
……
另一个坐标轴侧的端部的坐标值
[0095]
e5
……
一个坐标轴侧的端部
[0096]
p5
……
一个坐标轴侧的端部的坐标值
[0097]
sl
……
规定的斜率
[0098]
slb
……
另一个坐标轴侧的端部的坐标值和一个坐标轴侧的端部的坐标值之间的斜率
[0099]
c
……
交接动作
[0100]
fa2~fa4、fb2~fb4
……
相对范围
[0101]
m1
……
可动线性模块
[0102]
m2
……
固定线性模块(一个固定线性模块)
[0103]
m3
……
固定线性模块
[0104]
m4
……
固定线性模块
[0105]
m5
……
可动线性模块
[0106]
ta、tb
……
滑动件移载机构
[0107]
la
……
停止位置
[0108]
ls
……
移动开始位置
[0109]
ld
……
移动目标位置
[0110]
x
……
x方向(第1方向)
[0111]
y
……
y方向(第2方向)
[0112]
fp
……
位置曲线
[0113]
ip
……
位置指令值
[0114]
dp
……
位置检测值
[0115]
fv
……
速度曲线
[0116]
iv
……
速度指令值
[0117]
dv
……
速度检测值
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。