技术特征:
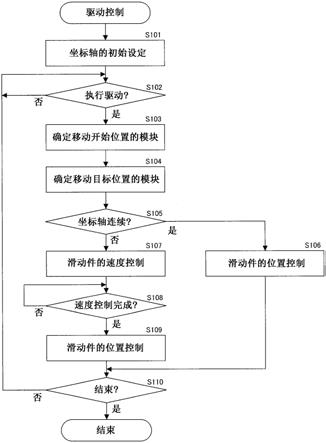
1.一种线性输送机系统,其中,具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与所述第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在所述第1方向上驱动所述滑动件,所述多个相对范围从所述第1方向与所述多个固定线性模块相对,并在所述第2方向上排列;滑动件移载机构,在所述多个相对范围之间输送所述可动线性模块;以及控制部,对所述多个固定线性模块以及所述可动线性模块分别设定坐标轴,并对于由所述固定线性模块以及所述可动线性模块驱动的所述滑动件执行基于所述坐标轴的位置控制,所述坐标轴通过与所述第1方向上的位置的变化相应地变化的坐标值来表示所述第1方向上的位置,所述滑动件能够从所述第1方向的一端相对于所述固定线性模块以及所述可动线性模块卡合及脱离,所述固定线性模块以及所述可动线性模块在所述第1方向上驱动卡合的所述滑动件,执行使所述滑动件在所述固定线性模块与所述可动线性模块之间移动的交接动作,所述控制部执行判断作为所述固定线性模块的所述坐标轴的一个坐标轴与作为所述可动线性模块的所述坐标轴的另一个坐标轴在所述第1方向上是否连续的判断处理,当执行所述判断处理的结果是在所述交接动作之前判断为所述一个坐标轴与所述另一个坐标轴不连续时,代替所述位置控制,而通过速度控制来控制所述交接动作中的所述滑动件的驱动,所述速度控制是基于速度指令值来控制所述滑动件的速度的控制。2.根据权利要求1所述的线性输送机系统,其中,在所述位置控制中,所述控制部通过基于位置指令值与位置检测值之间的偏差的反馈控制来驱动所述滑动件,所述位置指令值是基于表示所述滑动件的位置的时间变化的位置曲线而生成的,所述位置检测值是检测所述滑动件的位置而得到的,另一方面,在所述速度控制中,所述控制部通过基于速度指令值与速度检测值之间的偏差的反馈控制来驱动所述滑动件,所述速度指令值是基于表示所述滑动件的速度的时间变化的速度曲线而生成的,所述速度检测值是检测所述滑动件的速度而得到的。3.根据权利要求2所述的线性输送机系统,其中,所述控制部在使所述滑动件从移动开始位置朝向移动目标位置移动的所述交接动作中完成所述速度控制时,通过所述位置控制使所述滑动件从所述速度控制完成时所述滑动件停止的停止位置移动到所述移动目标位置。4.根据权利要求1至3中任一项所述的线性输送机系统,其中,所述控制部在执行所述判断处理的结果是在所述交接动作之前判断为所述一个坐标轴与所述另一个坐标轴连续时,通过所述位置控制来控制所述交接动作中的所述滑动件的驱动。5.根据权利要求1至4中任一项所述的线性输送机系统,其中,所述控制部以所述多个固定线性模块以及所述可动线性模块各自的所述坐标轴表示的所述坐标值互不重复的方式设定所述坐标轴。6.根据权利要求1至5中任一项所述的线性输送机系统,其中,所述坐标轴通过与所述第1方向上的位置的变化相应地以规定的斜率线性地变化的坐
标值来表示所述第1方向上的位置。7.根据权利要求6所述的线性输送机系统,其中,所述控制部在所述一个坐标轴中的所述另一个坐标轴侧的端部的所述坐标值和所述另一个坐标轴中的所述一个坐标轴侧的端部的所述坐标值之间的斜率与所述规定的斜率不同的情况下,判断为所述一个坐标轴与所述另一个坐标轴不连续。8.一种线性输送机系统的控制方法,所述线性输送机系统具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与所述第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在所述第1方向上驱动所述滑动件,所述多个相对范围从所述第1方向与所述多个固定线性模块相对,并在所述第2方向上排列;以及滑动件移载机构,在所述多个相对范围之间输送所述可动线性模块,其中,所述线性输送机系统的控制方法包括以下步骤:对所述多个固定线性模块以及所述可动线性模块分别设定坐标轴,所述坐标轴通过与所述第1方向上的位置的变化相应地变化的坐标值来表示所述第1方向上的位置;执行判断作为所述固定线性模块的所述坐标轴的一个坐标轴与作为所述可动线性模块的所述坐标轴的另一个坐标轴在所述第1方向上是否连续的判断处理;以及当所述判断处理的结果是判断为所述一个坐标轴与所述另一个坐标轴不连续时,通过速度控制来执行使所述滑动件在所述固定线性模块与所述可动线性模块之间移动的交接动作,所述速度控制是基于速度指令值来控制所述滑动件的速度的控制。9.一种线性输送机系统的控制程序,所述线性输送机系统具备:滑动件,在第1方向上被驱动;多个固定线性模块,在与所述第1方向交叉的第2方向上排列;可动线性模块,在多个相对范围之间移动,并在所述第1方向上驱动所述滑动件,所述多个相对范围从所述第1方向与所述多个固定线性模块相对,并在所述第2方向上排列;以及滑动件移载机构,在所述多个相对范围之间输送所述可动线性模块,其中,所述线性输送机系统的控制程序使计算机执行以下步骤:对所述多个固定线性模块以及所述可动线性模块分别设定坐标轴,所述坐标轴通过与所述第1方向上的位置的变化相应地变化的坐标值来表示所述第1方向上的位置;执行判断作为所述固定线性模块的所述坐标轴的一个坐标轴与作为所述可动线性模块的所述坐标轴的另一个坐标轴在所述第1方向上是否连续的判断处理;以及当所述判断处理的结果是判断为所述一个坐标轴与所述另一个坐标轴不连续时,通过速度控制来执行使所述滑动件在所述固定线性模块与所述可动线性模块之间移动的交接动作,所述速度控制是基于速度指令值来控制所述滑动件的速度的控制。10.一种记录介质,以能够由计算机读取的方式记录权利要求9所述的线性输送机系统的控制程序。
技术总结
使可动线性模块(M5)位于与并列配置的多个线性模块(M1~M5)中的一个固定线性模块(M2)相对的相对范围(Fb2),并且执行使滑动件在一个固定线性模块(M2)与可动线性模块(M5)之间移动的交接动作(C)。执行判断一个固定线性模块(M2)的坐标轴(A2)与可动线性模块(M5)的坐标轴(A5)在X方向上是否连续的判断处理(步骤S105)。在判断处理中,当在交接动作(C)之前判断为坐标轴(A2、A5)不连续时,对于滑动件(4)执行速度控制并且执行交接动作(C)(步骤S107)。因此,能够抑制由于对可动线性模块(M1)以及可动线性模块(M5)设定的坐标轴(A2、A5)的不连续性而不能执行使滑动件(4)在它们之间移动的交接动作(C)的状况的发生。动的交接动作(C)的状况的发生。动的交接动作(C)的状况的发生。
技术研发人员:上野贤治 藤田贵吉 青木俊介
受保护的技术使用者:雅马哈发动机株式会社
技术研发日:2019.04.23
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。