技术特征:
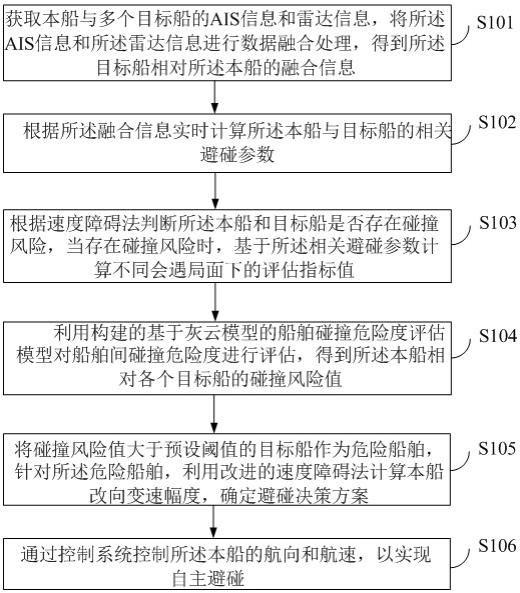
1.一种开阔水域船舶自主避碰方法,其特征在于,所述方法包括:获取本船与多个目标船的ais信息和雷达信息,将所述ais信息和所述雷达信息进行数据融合处理,得到所述目标船相对所述本船的融合信息;根据所述融合信息实时计算所述本船与目标船的相关避碰参数;根据速度障碍法判断所述本船和目标船是否存在碰撞风险,当存在碰撞风险时,基于所述相关避碰参数计算不同会遇局面下的评估指标值,并利用构建的基于灰云模型的船舶碰撞危险度评估模型对船舶间碰撞危险度进行评估,得到所述本船相对各个目标船的碰撞风险值;所述会遇局面包括对遇、交叉和追越局面;将碰撞风险值大于预设阈值的目标船作为危险船舶,针对所述危险船舶,利用改进的速度障碍法计算本船改向变速幅度,确定避碰决策方案;通过控制系统控制所述本船的航向和航速,以实现自主避碰。2.根据权利要求1所述的开阔水域船舶自主避碰方法,其特征在于,根据所述基于相关避碰参数计算不同会遇局面下的评估指标值,并利用构建的基于灰云模型的船舶碰撞危险度评估模型对船舶间碰撞危险度进行评估,得到本船相对各个目标船的碰撞风险值,包括:定义所述船舶碰撞危险度评估模型中的数字特征峰值、左右边界值、熵以及超熵参数为:参数为:参数为:数学期望为:将目标船作为评估对象,将目标船相对本船的碰撞危险度及基于相关避碰参数计算的评估指标划分灰类;构建非对称灰云白化权函数并计算白化权值;根据预设的指标权重及白化权值计算综合聚类系数;根据综合聚类系数计算碰撞风险值;其中,,且取值根据目标船相对于本船的相对速度
在x轴及y轴上分量方向所设定,和分别为本船和目标船的相对速度在x轴和y轴上速度分量。3.根据权利要求2所述的开阔水域船舶自主避碰方法,其特征在于,所述将目标船作为评估对象,将目标船相对本船的碰撞危险度及基于相关避碰参数计算的评估指标划分灰类,包括:确定评估对象各评估指标属于灰类的点作为该评估指标对应灰类的中心点,根据各个指标取值范围划分s个灰类;评估对象碰撞危险度划分为低风险、较低风险、中等风险、较高风险和高风险五个等级;所述构建非对称灰云白化权函数并计算白化权值,包括:以第k个灰类参数的左边界点和中心点构建以为峰值点的左单侧正态灰云模型,以其右边界点和中心点构建以为峰值点的右单侧正态灰云模型,得到指标j关于灰类k的正态灰云白化权函数:取n次求平均值作为最终的白化权值:计算归一化后白化权值:所述根据预设的指标权重及白化权值计算综合聚类系数,包括:计算第i个对象关于第k个灰类的综合聚类系数如下:其中:为指标j关于对象i的分类权重;所述根据综合聚类系数计算碰撞风险值,包括:计算得到对象i的综合聚类系数向量为所属灰类:
假设将分别赋给从低风险到高风险的五个等级值;其对应的区间值分别为[0,0.2],[0.2,0.4],[0.4,0.6],[0.6,0.8]和[0.8,1];考虑到综合聚类系数的最大值通常分布在[0.2,0.6]区间内,可以通过以下函数计算碰撞风险值:。4.根据权利要求1或2所述的开阔水域船舶自主避碰方法,其特征在于,所述针对危险船舶计算本船改向变速幅度,确定避碰决策方案,包括:设定为本船os相对目标船舶ts的相对速度,,为矢量方向上的射线,为危险船舶ts以r为半径的圆形船舶领域,本船与目标船舶发生碰撞的条件为:设定射线与构成的相对碰撞区rcc,在本船相对目标船舶的任意速度时,本船与目标船舶将发生碰撞:速度障碍区间为:其中,为闵可夫斯基矢量和运算;计算本船在给定时间区间内能改变的速度矢量:其中,为本船目前速度,本船加速度;计算在给定时间区间内本船可以转向的角度:其中,为本船当前航向角,为本船当前的角速度,为本船当前的角加速度;将本船在给定
∆
t时间内可以改变的速度大小和航向角度, 离散化m个速度和n个航向角,得到速度矢量集合为,并确定本船的改向变速避让区间为:根据避碰规则取避让区间中间值,即在给定
∆
t时间内改向变速避让区间的中间值作为改向变速的最终避碰决策方案。5.根据权利要求1或2所述的开阔水域船舶自主避碰方法,其特征在于,所述融合信息包括所述目标船相对所述本船的方位、航速、航向、距离信息;所述将所述ais信息和所述雷达信息进行数据融合处理,包括:对ais信息和arpa雷达信息进行数据融合,融合航迹关联,设定时间粗关联公式:
其中,为预设时间阀值,为ais探测到目标ai的时刻,为雷达探测到目标rj的时刻,若满足时间粗关联公式,则判定为符合时间粗关联;设定距离粗关联公式:其中,为预设距离阀值,为ais在t时刻探测到目标ai的距离,为在t时刻雷达探测到目标rj的距离,若满足距离粗关联公式,则判定为符合距离粗关联;若ais探测到的目标ai与雷达探测到的目标rj既符合时间粗关联又符合距离粗关联,则采取基于模糊因素判断的双门限细关联算法:则采取基于模糊因素判断的双门限细关联算法:其中,分别为方位、航速、航向、距离的关联度,分别为方位、航速、航向、距离的调整系数,分别为方位、航速、航向、距离的欧式距离,分别为ais设备在方位、航速、航向、距离上的方差;为最终关联度,分别为方位、航速、航向、距离的权重;若满足预设门限阈值,判定为符合细关联,用加权融合算法对ai和rj目标进行位置信息的数据融合:
其中,为ais的位置信息,为雷达的位置信息,和分别为其对应权值系数;为ais设备位置方差,为雷达设备位置方差,最后得到的x为融合信息。6.根据权利要求5所述的开阔水域船舶自主避碰方法,其特征在于,所述相关避碰参数包括最近会遇距离dcpa、最近会遇时间tcpa、两船间距离d、相对方位b和速度比k,所述根据所述融合信息计算所述本船与目标船的相关避碰参数,包括:计算本船和目标船的相对速度:其中,和分别为本船和目标船的速度,和分别为本船和目标船的航向;计算相对速度航向角:计算目标船相对于本船的方位角:计算两船间相对距离为:计算最近会遇距离dcpa和最近会遇时间tcpa为:计算最近会遇距离dcpa和最近会遇时间tcpa为:。7.根据权利要求1或2所述的开阔水域船舶自主避碰方法,其特征在于,所述通过控制系统控制所述本船的航向和航速,包括:利用船舶运动模型mmg和pid航向控制系统执行避碰决策方案,按照预定的速度和航向
控制本船实现自主避碰。8.一种开阔水域船舶自主避碰系统,其特征在于,所述系统包括:信息融合模块,用于获取本船与多个目标船的ais信息和雷达信息,将所述ais信息和所述雷达信息进行数据融合处理,得到所述目标船相对所述本船的融合信息;避碰信息处理模块,用于根据所述融合信息实时计算所述本船与目标船的相关避碰参数;碰撞风险评估模块,用于根据速度障碍法判断所述本船和目标船是否存在碰撞风险,当存在碰撞风险时,基于所述相关避碰参数计算不同会遇局面下的评估指标值,并利用构建的基于灰云模型的船舶碰撞危险度评估模型对船舶间碰撞危险度进行评估,得到所述本船相对各个目标船的碰撞风险值;所述会遇局面包括对遇、交叉和追越局面;避碰决策模块,用于将碰撞风险值大于预设阈值的目标船作为危险船舶,针对所述危险船舶,利用改进的速度障碍法计算本船改向变速幅度,确定避碰决策方案;控制执行模块,用于通过控制系统控制所述本船的航向和航速,以实现自主避碰。9.一种计算机设备,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述开阔水域船舶自主避碰方法的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述开阔水域船舶自主避碰方法的步骤。
技术总结
本申请涉及一种开阔水域船舶自主避碰方法、系统、设备及存储介质,其方法包括:获取本船与多个目标船的AIS信息和雷达信息,进行数据融合得到融合信息;实时计算本船与目标船的相关避碰参数;根据速度障碍法判断存在碰撞风险时,基于相关避碰参数计算不同会遇局面下的评估指标值,利用构建的基于灰云模型的船舶碰撞危险度评估模型对船舶间碰撞危险度进行评估,得到本船相对各个目标船的碰撞风险值;将碰撞风险值大于预设阈值的目标船作为危险船舶,利用改进的速度障碍法计算本船改向变速幅度,确定避碰决策方案;通过控制系统控制本船的航向和航速,实现自主避碰。本申请的船舶自主避碰方法更加准确和智能,可有效减少海上碰撞事故和提高航行安全。撞事故和提高航行安全。撞事故和提高航行安全。
技术研发人员:黄立文 张可 贺益雄 郝国柱 刘明明
受保护的技术使用者:武汉理工大学
技术研发日:2021.11.03
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。