1.本公开涉及诸如磁性多匝传感器的磁性传感器。特别地,本公开涉及一种监测磁场的方法,磁性多匝传感器在该磁场中运行。
背景技术:
2.磁性多匝传感器通常用于需要监测装置转动次数的应用中。一个例子是车辆中的方向盘。磁性多匝传感器通常包括对施加的外部磁场敏感的磁阻元件。磁阻元件的电阻可以通过在传感器附近旋转磁场来改变。磁阻元件的电阻的变化将被跟踪以确定磁场中的匝数,该匝数可转换为被监测的装置中的匝数。
3.典型地,多匝传感器包括以螺旋或闭环构造布置成条状的多个磁阻元件,其中条状部的一端耦合到畴壁发生器。畴壁发生器响应于外部磁场的旋转而产生畴壁,然后将这些畴壁注入磁条中,从而在每个磁阻元件通过时改变其磁畴。随着磁畴的变化,磁阻元件的电阻也将由于磁取向的变化而变化。
技术实现要素:
4.本公开提供了一种监测磁场的方法,其中磁性传感器在其中工作以确保传感器在其限定的磁窗内工作。例如,该方法使用多匝传感器或与多匝传感器结合使用的某种其他磁阻传感器(例如,磁性单匝传感器或第二多匝传感器)的传感器输出,以监测工作磁场。当使用多匝传感器的传感器输出时,可以实现参考磁阻元件,该参考磁阻元件仅用于测量磁场并且对传感器的匝数没有贡献。
5.在第一方面,本公开提供一种监测位于外部磁场附近的第一磁性传感器的方法,该第一磁性传感器具有在第一磁场强度和第二磁场强度之间的操作窗口,其中该方法包括:测量位于所述外部磁场附近的另一个磁性传感器的信号;基于测量的信号确定所述外部磁场的磁场强度;和确定所述外部磁场的磁场强度是否在磁性多匝传感器的操作窗口内。
6.这样,可以监测外部磁场的磁场强度,例如由旋转机械系统的一部分的磁体产生的磁场强度,以确定是否在操作窗口内,磁性传感器将在该操作窗口内运行而没有故障。这可以从位于外部磁场附近的一些磁感测装置的输出来确定。
7.第一磁性传感器可以是一个磁性多匝传感器,而另一个磁性传感器可以是磁性单匝传感器。例如,磁性单匝传感器可以是基于各向异性磁阻(amr)的单匝传感器,而磁性多匝传感器可以是基于巨磁阻(gmr)或隧道磁阻(tmr)的多匝传感器。在这种情况下,从所述磁性单匝传感器的信号确定磁场强度包括测量由所述磁性单匝传感器输出的电压。低于预定值的电压输出指示低于所述操作窗口的第一磁场强度的磁场强度。电压输出可以包括正弦分量和余弦分量,其中确定磁场强度包括计算所述正弦分量和所述余弦分量的半径。
8.mr单匝传感器以及基于gmr和tmr的传感器的幅度也取决于温度。在这方面,对于所有这些x个mr传感器,温度系数或多或少是已知的。通过测量温度和振幅,可以确定更精
确的场强信息。在汽车应用中,无论如何,处理电路通常还是出于诊断原因来测量温度,因此可以轻松地将温度测量结果与场强测量结果相结合。在这方面,可以基于测得的温度升高将电源电压或电流增加恒定因子,从而减弱由温度升高引起的灵敏度降低。例如,如果温度每升高1℃单圈传感器的灵敏度降低1%,则电源电压可以每升高1℃升高1%,以抵消灵敏度的降低。
9.在本文描述的其他布置中,另一个磁性传感器可以是第一磁性传感器本身。例如,测量磁性多匝传感器的信号以确定磁场强度,并确定该磁场强度是否在多匝传感器将无故障运行的工作窗口内。
10.例如,从磁性多匝传感器的信号确定磁场强度可以包括测量磁性多匝传感器的至少一个磁阻元件中的电阻变化。
11.在这种情况下,该方法可以包括将滤波器应用于所测量的电阻。
12.在其他布置中,另一个磁性传感器可以是参考传感器。
13.例如,参考传感器可以是另一个磁性多匝传感器。另一个磁性多匝传感器可以在第三磁场强度和第四磁场强度之间具有另一个操作窗口,该另一个操作窗口不同于磁性多匝传感器的操作窗口。在某些情况下,其他磁性多匝传感器的操作窗口和磁性多匝传感器的操作窗口可能会重叠。通过具有不同操作窗口的附加磁性多匝传感器,基于另一个磁性多匝传感器的行为,可以检测到磁场强度太接近第一或第二磁场强度。例如,通过使用两个具有重叠磁窗的多匝传感器,通过任何一个传感器测得的匝数计数中的任何偏差都将指示磁场强度在某个点已超出操作窗。
14.另一个磁性多匝传感器可以包括第一宽度的磁阻元件,并且磁性多匝传感器可以包括第二宽度的磁阻元件。通过为两个多匝传感器提供不同宽度的磁阻元件,两个传感器具有不同的操作窗口。
15.磁性多匝传感器可以是基于巨磁阻(gmr)的多匝传感器。
16.在进一步的布置中,参考传感器可以是参考磁阻元件。
17.在这方面,磁性多匝传感器可以包括多个具有第一宽度的磁阻元件,并且参考磁阻元件可以具有第二宽度。在某些情况下,参考磁阻元件可以连接到磁性多匝传感器的磁阻元件。确定外部磁场的磁场强度可以包括测量参考磁阻元件中的电阻变化。
18.在第二方面,本公开提供一种用于监测位于外部磁场附近的第一磁性传感器的装置,该第一磁性传感器具有在第一磁场强度和第二磁场强度之间的操作窗口,其中所述装置被配置为接收位于所述外部磁场附近的另一个磁性传感器的信号,从接收的信号确定所述外部磁场的磁场强度,和确定所述外部磁场的磁场强度是否在磁性多匝传感器的操作窗口内。
19.装置可被配置为:如果所述外部磁场的磁场强度在所述操作范围之内外,则检测所述第一磁性传感器中的故障。例如,在第一磁性传感器是多匝传感器的情况下,可检测到错误的匝数。
20.装置可以包括与所述另一个磁性传感器通信并且被配置为接收和处理所述另一个磁性传感器的信号的处理电路。
21.第一磁性传感器可以是磁性多匝传感器,而另一个磁性传感器可以是磁性单匝传感器,例如,基于amr的单匝传感器和基于巨磁阻(gmr)或隧道磁阻(tmr)的多匝传感器。装
置可被配置为基于所述磁性单匝传感器的电压输出确定所述磁场强度,其中低于预定值的电压输出指示低于所述操作窗口的第一磁场强度的磁场强度。此外,amr单匝传感器以及基于gmr和tmr的传感器的幅度取决于温度。在这方面,对于所有这些x个mr传感器,温度系数或多或少是已知的。通过测量温度和振幅,可以确定更精确的场强信息。在汽车应用中,无论如何,出于诊断原因,处理电路通常都会测量温度,因此温度测量可以轻松地合并到场强的测量中。
22.在第三方面,本公开提供了一种磁性传感器系统,包括:位于外部磁场附近的第一磁性传感器;该第一磁性传感器具有在第一磁场强度和第二磁场强度之间的操作窗口;和装置,被配置为接收位于所述外部磁场附近的另一个磁性传感器的信号,从接收的信号确定所述外部磁场的磁场强度,和确定所述外部磁场的磁场强度是否在磁性多匝传感器的操作窗口内。
23.位于外部磁场附近的另一个磁性传感器可以是磁性单匝传感器。在某些情况下,系统可以包括磁性单匝传感器。
24.装置可被配置为基于所述磁性单匝传感器的电压输出确定所述磁场强度,其中低于预定值的电压输出指示低于所述操作窗口的第一磁场强度的磁场强度。
25.装置可被配置为:如果所述外部磁场的磁场强度在所述操作范围之内外,则检测所述第一磁性传感器中的故障。例如,在第一磁性传感器是多匝传感器的情况下,可能会检测到错误的匝数。
26.装置可以包括与所述另一个磁性传感器通信并且被配置为接收和处理所述另一个磁性传感器的信号的处理电路。
27.第一磁性传感器可以是磁性多匝传感器,例如,基于巨磁阻(gmr)或基于隧道磁阻(tmr)的多匝传感器。
28.在其他布置中,另一个磁性传感器可以是诸如上述那些的基准传感器。例如,参考传感器可以是另外的磁性多匝传感器或参考磁阻元件。
29.在第四方面,本公开提供一种监测包括第一磁性多匝传感器和第二磁性多匝传感器的磁性多匝(mt)传感器系统的方法,其中磁性多匝(mt)传感器系统位于外部磁场附近,并且其中该方法包括:
30.测量所述第一磁性多匝传感器的第一信号,所述第一磁性多匝传感器具有在第一磁场强度和第二磁场强度之间的第一操作窗口;
31.测量第二磁性多匝传感器的第二信号,第二磁性多匝传感器具有在第三磁场强度和第四磁场强度之间的第二操作窗口,其中第二操作窗口与第一操作窗口重叠;
32.基于第一和第二测量信号检测外部磁场的磁场强度的变化。
33.如果第一信号不同于第二信号,则可以检测到超出第一或第二操作窗口的外部磁场的磁场强度的偏差。
34.在第五方面,本公开提供一种用于监测磁性多匝(mt)传感器系统的装置,包括第一磁性多匝传感器和第二磁性多匝传感器,其中磁性多匝(mt)传感器系统位于外部磁场附近,其中所述装置被配置为执行根据以上第四方面的方法。
35.在第六方面,本公开提供了一种磁性多匝传感器系统,包括:
36.第一磁性多匝传感器,第一磁性多匝传感器具有在第一磁场强度和第二磁场强度
之间的第一工作窗口;
37.第二磁性多匝传感器,第二磁性多匝传感器具有在第三磁场强度和第四磁场强度之间的第二工作窗口,其中第二工作窗口与第一工作窗口重叠,和
38.根据第五方面的装置。
附图说明
39.现在将仅通过示例的方式参考附图来描述本公开,在附图中:
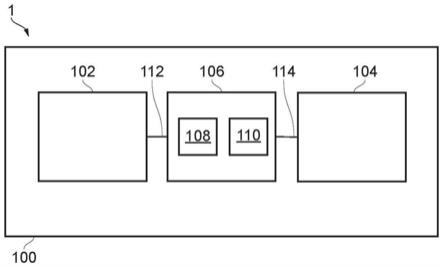
40.图1是根据本公开的实施例的多匝传感器和单匝传感器的示意性俯视图。
41.图2a和图2b是示出本公开的实施例中的传感器输出的曲线图。
42.图3是示出本公开的实施例中的传感器输出的图。
43.图4a
‑
4b是示出本公开的实施例中的传感器输出的曲线图。
44.图5是根据本公开的实施例的磁性多匝传感器的示例;
45.图6是根据本公开实施例的包括两个磁性多匝传感器的磁性多匝系统。
具体实施方式
46.磁性多匝传感器可用于监测与磁体连接的旋转轴的转数。这样的磁感测可以应用于各种不同的应用,例如汽车应用、医疗应用、工业控制应用、消费应用以及需要关于旋转部件的位置的信息的许多其他应用。
47.通常,多匝传感器包括以螺旋或闭环配置布置成条状的多个磁阻元件。基于螺旋或闭环系统中受控畴壁传播的多匝传感器在定义的磁窗中运行。磁窗可以由最小磁通密度bmin和最大磁通密度bmax定义。低于bmin,畴壁传播可能会失败,从而导致匝数信息损坏。在bmax以上,畴壁可能会过早成核,因此传感器将包含错误的匝数信息。因此,将传感器保持在bmin与bmax之间的磁窗内非常重要,以便提供准确的匝数信息。
48.因此,本公开提供了一种监测磁场的方法,其中多匝传感器在其中运行,以确保多匝传感器在其限定的磁窗内运行。具体地,该方法使用多匝传感器本身或与多匝传感器结合使用的另一个磁性传感器(例如单匝传感器或另一个多匝传感器)中的任一个的传感器输出来确定是否磁场位于多圈传感器的磁性窗口内,即在bmin和bmax之间。多匝传感器还可例如通过将一个电阻器的输出与传感器螺旋内的所有其他电阻器进行比较来实现参考电阻器。
49.图1示出了示例性磁性传感器系统1的示意性框图,该示例性磁性传感器系统1包括多匝(mt)传感器102,并且可以用于实施本文所述的方法。磁性多匝传感器系统1还包括单匝(st)传感器104,尽管可以理解的是,磁性传感器系统1可以在没有st传感器104的情况下或具有不同类型的磁性传感器例如第二磁性多匝传感器的情况下实现,如将在下面更详细地描述的。
50.系统1还包括处理电路106和集成电路100,在其上设置有mt传感器102、st传感器104和处理电路106。处理电路106从mt传感器102接收信号s
mt
112,并使用转数计数解码器108处理接收到的信号以确定转数计数,转数解码器108将输出代表在mt传感器102附近旋转的外部磁场(未示出)的转数的转数。类似地,处理电路106还可以从st传感器104接收信号s
st
114,并使用位置解码器110处理接收到的信号以输出外部磁场的角位置。如将在下面
更详细地讨论的,匝数解码器108和位置解码器110都可以被配置为测量多匝传感器系统1在其中运行的磁场。
51.在一个实施例中,st传感器104可以是基于各向异性的磁阻(amr)、巨磁阻(gmr)或隧道磁阻(tmr)的位置传感器,其具有取决于场的输出信号114。也就是说,输出信号114指示磁场强度,并且磁场幅度的任何变化都将导致输出信号114的幅度成比例地变化。因此,st传感器104的输出信号114可用于检测磁场是否低于mt传感器102的磁性工作窗口bmin的下限。
52.图2a和图2b提供了示出了在磁场强度足以使磁阻元件饱和的情况下(即st传感器的输出信号仅指示磁场角度,并且不随磁场强度而变化的点)以及在磁场强度降至饱和状态以下的情况下基于amr的st传感器104的输出信号的示例。st传感器104的输出信号114是具有正弦和余弦分量的电压测量值。在图2a中,由虚线示出了st传感器104在磁场旋转时处于饱和状态的正弦和余弦信号,而由实线示出了当磁场下降至饱和以下时的正弦和余弦信号。这样,当磁场下降到使st传感器104的磁阻元件饱和所需的强度以下时,输出信号114的振幅减小。更准确地说,如图2b所示,正弦和余弦信号的半径可用于测量磁场,并使用以下公式确定其是否已降至bmin以下:
[0053][0054]
这样,来自st传感器104的输出信号114可以由位置解码器110或处理电路106的某些其他部分进行处理,以确定磁场是否已降至mt传感器102的磁性工作窗口的下限bmin以下。如果磁场强度已经下降到bmin以下,则可以认为mt传感器102的匝数不正确。因此,可以连续地监测来自st传感器104的输出信号114,以监测被测量的磁场的强度,从而检测对系统的任何变化或破坏,这将导致错误的圈数。
[0055]
另外,st传感器104的幅度取决于温度。在这方面,对于st传感器104或多或少已知温度系数。通过测量温度以及振幅,还可以确定更精确的场强信息。例如,基于所测量的温度,可以相应地增加输入到st传感器104的电压。在这方面,基于amr的st传感器104的输出信号将改变约
‑
0.35%/℃。st传感器104的输出幅度还取决于电源电压,在饱和模式下(即,磁阻材料饱和),输出通常约为13mv/v。也就是说,在1v的电源电压下,st传感器的最大输出为13mv,在2v的电源电压下,st传感器的最大输出为26mv。通过产生与温度有关的传感器电压源,可以实现与温度无关的输出电压。也就是说,但是随着温度的变化调节电压供应,可以抵消由于温度变化引起的输出电压的任何变化。当像这样对幅度进行温度控制时,可以滤除幅度中任何与场有关的变化,从而确定与温度的任何变化无关的场强。
[0056]
在汽车应用中,出于诊断原因,处理电路106通常被配置为测量温度,因此温度测量可以容易地结合到场强的测量中。在这方面,处理电路106可以与单独的温度传感器(未示出)通信,该温度传感器可以被布置在集成电路100上。可替代地,由于对于xmr传感器或多或少已知温度系数,因此,例如,mt传感器102的信号可以用于测量温度的变化。
[0057]
在另一个实施例中,来自mt传感器102的传感器信号112可以用于导出关于磁场强度的信息。在这种情况下,将理解的是,磁感测系统1可以包括或可以不包括单匝传感器104。图5示出了磁性多匝传感器5的磁条502布局的示例,在此示出了集成电路500,其可以提供图1所示的mt传感器102以用于本文所述的任何实施例中。
[0058]
在图5中,磁条502包括多个磁阻元件504,优选地,基于gmr的磁阻元件,或者可选地,基于tmr的磁阻元件。在该示例中,磁条502是基于gmr的磁阻迹线,其物理上以螺旋构造布置。这样,磁条502具有由彼此串联布置的磁阻元件504形成的多个段。磁阻元件504用作可变电阻器,其响应于磁对准状态而改变电阻。磁条502的端部耦合到畴壁产生器(dwg)506,并且将理解的是,dwg 506可以耦合到磁条502的任一端。dwg 506响应于外部磁场的旋转或传感器5的工作磁窗施加的一些其他强外部磁场而生成畴壁。然后将这些畴壁注入到磁条502中,并且随着磁畴的变化,磁阻元件504的电阻也将由于磁对准的结果变化而变化。
[0059]
为了在产生畴壁时测量磁阻元件504的变化电阻,将磁条502电连接到电源电压vdd 508和接地gnd 510,以在一对相对的角之间施加电压。电压源之间的中间拐角处设有电连接512,以提供半桥输出。这样,多匝传感器5包括多个惠斯通电桥电路,每个半桥512对应于外部磁场的半匝或180度旋转。因此,电连接512上的电压的测量结果可用于测量磁阻元件504的电阻的变化,因此,例如可以通过将电压测量结果输出到匝数解码器108来确定磁场的匝数。
[0060]
图5中示出的示例包括4个螺旋绕组和8个半桥512,并且因此被配置为对外部磁场的四整圈计数。然而,将理解,取决于磁阻元件504的数量,多匝传感器可具有任何数量的螺旋绕组。通常,多匝传感器可计数与螺旋绕组一样多的匝数。还应当理解,磁阻元件504可以任何合适的方式电连接,以便提供代表磁对准状态变化的传感器输出。例如,磁阻元件504可以以矩阵布置的方式连接,例如在us 2017/0261345中描述的矩阵布置,其通过引用整体结合到本文中。作为另一替代方案,每个磁阻段可以单独地连接,而不是以桥接布置的方式连接。
[0061]
在磁阻元件504之一处测得的电阻变化还可用于确定外部磁场强度是否在mt传感器5的定义工作窗口内。图3展示了多匝螺旋中的单个磁阻元件504的电阻如何随磁场角的变化而变化。磁阻元件504的电阻以175度、310度和490度快速变化。在那些过渡点处,畴壁穿过条带502,从而改变磁阻元件504的电阻,使得其在高电阻读数和低电阻读数之间变化。
[0062]
然而,磁阻元件504的电阻也由于gmr和amr效应而改变,并且因此随着变化的磁场强度而改变,如图4a和4b所示。图4a示出了在没有畴壁穿过磁条502并且磁场强度为31mt的情况下磁阻元件504的电阻变化。这样,由于畴壁穿过而引起的总电阻变化的一部分已被去除。虽然变化是电阻,其远低于当畴壁通过磁条502传播时的电阻,但电阻变化的其余部分非常依赖于磁场强度。因此,电阻变化的该部分的幅度对于较低的磁场非常低,而对于较高的磁场非常高。例如,如图4b所示,磁场强度已降低到19mt,因此电阻变化明显降低。
[0063]
这样,可以例如使用合适的带通滤波器滤除由于畴壁传播而引起的电阻变化的部分,以便获得仅由于磁场强度而引起的电阻变化。当与单圈传感器结合使用时,可以在磁场每旋转5
°
时收集一次电阻和/或电压数据,并在n次旋转后执行基于角度的快速傅立叶变换(fft)。因此,可以将电阻变化的gmr和amr部分滤除,并将所得信号用于确定场强。mt传感器5的输出信号112的幅度和形式因此可以被处理以确定磁场强度,该磁场强度又可以用于确定传感器是否在限定的磁窗内运行。将理解的是,整个螺旋或螺旋内的单个磁阻元件的电阻变化可用于测量磁场强度。如果磁场强度已经下降到bmin以下或超过bmax,则可以将mt传感器5的转数视为不正确。相反,如果磁场强度在操作窗口内,则匝数可以认为是准确的。
[0064]
在基于tmr的磁阻元件504的情况下,元件504的电阻将仅由于tmr效应而改变,而
对信号没有amr效应。但是,输出信号112的幅度仍将取决于磁场强度,因此可用于确定传感器是否在定义的磁窗内运行。
[0065]
使用以上参考图3至图5描述的原理,可以在其他实施例中实现参考磁阻元件以测量外部磁场的磁场强度。在一个实施例中,参考磁阻元件与mt传感器102是分开的,使得它没有传播通过它的任何畴壁。因此,参考磁阻元件的输出信号将是纯gmr/amr信号,因此该参考磁阻元件的电阻变化可用于测量磁场强度,而无需任何滤波。然而,应当理解,参考磁阻元件也可以结合畴壁发生器来实现,以便在高电阻测量和低电阻测量之间获得明确定义的切换。
[0066]
参考磁阻元件可以与传感器中使用的磁阻元件相同(并因此具有与mt传感器102相同的磁工作窗口),或者可以具有更窄或更宽的磁道宽度,从而具有不同的工作窗口。例如,参考磁阻元件可具有较宽的轨道宽度,使得其电阻将在低于但非常接近mt传感器102的bmax的磁场下在高阻和低阻之间切换,从而表明磁场非常接近mt传感器120的操作窗口的上限。然后可以使用具有更宽轨道宽度的参考磁阻元件来监测操作窗口的下限bmin。在此,对于高于bmin的磁场,参考磁阻元件的电阻将在高阻与低阻之间不断切换,但是如果磁场强度降至bmin以下,则磁阻元件将停止切换。
[0067]
还应当理解,也可以以其他方式来改变参考磁阻元件的磁窗,例如,通过改变参考磁阻元件的自由层的尺寸和/或材料,该自由层是构成磁阻元件的层堆叠中的自由层,该磁阻元件响应于外部施加的磁场而改变其磁化取向状态。
[0068]
在另一个实施例中,mt传感器,例如图5中所示的螺旋,可以包括如上所述的参考磁阻元件505,其中在该参考磁阻元件505处测量的电阻也用于监测磁场强度。
[0069]
在另一实施例中,如图6所示,包括在集成电路600上示出的第一mt传感器a和第二mt传感器b的多匝传感器系统6可以用于监测磁场强度。应当理解,可以使用多匝传感器系统6代替图1所示的mt传感器102。在该示例中,每个mt传感器a、b具有与图5中所示的磁条基本相同的螺旋布局,每个包括以螺旋带602a、602b布局串联连接的多个磁阻元件604a、604b。每个磁条602a、602b连接到电源电压508a、508b和接地610a、610b,其中电连接612a、612b在电压源之间的一半处的拐角处以提供半桥输出。磁条602a、602b的端部还连接到dwg 606a、606b,用于响应于外部磁场的旋转而产生畴壁。
[0070]
在一个示例中,第一mt传感器a仅用于计数外部磁场的匝数,而第二mt传感器b用作用于监测磁场强度的参考螺旋。在这种情况下,第二mt传感器b可以包括磁阻元件604b,磁阻元件604b具有更宽或更窄的磁道宽度,以使mt传感器b的磁操作窗口不同于第一mt传感器a。这样,如上所述,第二mt传感器b的磁阻元件604b的工作非常接近第一mt传感器a的bmin和bmax,因此,如果磁场强度在任一方向上都超出了第一mt传感器a的操作窗口,则它们的电阻将在高电阻和低电阻之间开始或停止切换。
[0071]
在另一个示例中,第一mt传感器a和第二mt传感器b均用于计数匝数,其中第一mt传感器和第二mt传感器具有不同但重叠的磁性操作窗口。例如,如果磁性传感器系统针对15mt至35mt的磁场工作,则第一mt传感器a可以设计为具有10mt至35mt的磁窗,而第二mt传感器b可以覆盖15mt至40mt的范围。在15mt至35mt的正常工作范围内,两个螺旋将正确运行,因此,两个螺旋将输出相同的匝数。如果磁场降到15mt以下,则第一mt传感器a将继续正确运行并输出准确的转数,而第二mt传感器b将由于磁场低于bmin而可靠地停止运行。在这
种情况下,磁畴壁很可能会沿着第二传感器b的轨道被钉住,然后被经过的其他磁畴壁消灭,从而导致错误的匝数。从该时间点开始,两个mt传感器的读数会有差异,由于磁场强度的变化,这可以检测为第二mt传感器b中的故障。因此,第一mt传感器a的输出可以继续用于计数匝数,而第二mt传感器b的输出可以忽略。类似地,如果磁场增加到35mt以上,则第二mt传感器b将继续正确计数,而第一mt传感器a将由于有核畴壁而损坏,因此应忽略其输出。
[0072]
在未测量mt传感器(或st传感器)输出时,磁场强度仅暂时偏离磁性操作窗口之外,然后在该时间之前返回到磁性窗口内的情况下,这特别有用传感器输出正在测量。在这种情况下,mt传感器的输出会损坏而无法检测到。因此,通过使用两个具有重叠磁窗的mt传感器,任何一个传感器测得的匝数计数中的任何偏差都将指示磁场强度在某个点已超出操作窗。
[0073]
尽管以上提供了监测多匝传感器在其中工作的磁场的方法,以确保多匝传感器在其定义的磁窗内工作,但是应当理解,这些方法也可以应用于其他具有定义的操作窗口的磁性传感器,例如霍尔传感器、tmr角度传感器或双轴tmr场传感器。
[0074]
应用
[0075]
本文讨论的原理和优点中的任何一个都可以应用于其他系统,而不仅仅是上述系统。一些实施例可以包括本文阐述的特征和/或优点的子集。可以将上述各种实施例的元素和操作组合以提供其他实施例。本文讨论的方法的动作可以适当地以任何顺序执行。而且,在适当时,本文所讨论的方法的动作可以串行地或并行地执行。尽管以特定布置示出了电路,但是其他等效布置也是可能的。
[0076]
可以在各种电子装置或系统中实现本公开的各方面。例如,根据本文讨论的任何原理和优点实现的相位校正方法和传感器可以被包括在各种电子装置和/或各种应用中。电子装置和应用程序的示例可以包括但不限于伺服器、机器人、飞机、潜水艇、牙刷、生物医学传感装置以及消费类电子产品的一部分、例如半导体芯片和/或封装模块、电子测试设备等。此外,电子装置可以包括未完成的产品,包括那些用于工业、汽车和/或医疗应用的产品。
[0077]
除非上下文清楚地另外要求,否则在整个说明书和权利要求书中,词语“包括”、“包含”、“含有”、“具有”等应以包括性含义来解释,而不是排他性或唯一性的意思,也就是说,在“包括但不限于”的意义上。如本文中通常使用的,词语“耦合”或“连接”是指可以直接连接或通过一个或多个中间元件连接的两个或多个元件。因此,尽管在附图中示出的各种示意图描绘了元件和组件的示例布置,但是在实际的实施例中可以存在附加的中间元件、装置、特征或组件(假设所描绘的电路的功能没有受到不利影响)。如本文所使用的,词语“基于”通常旨在涵盖“仅基于”和“至少部分地基于”。另外,当在本技术中使用时,词语“在此”、“上方”、“下方”和类似含义的词语应整体上指本技术,而不是指本技术的任何特定部分。在上下文允许的情况下,在某些实施例的详细描述中使用单数或复数的词也可以分别包括复数或单数。涉及两个或多个项目的列表中的单词“或”旨在涵盖该单词的以下所有解释:列表中的任何项目、列表中的所有项目以及列表中的项目的任意组合。本文提供的所有数值或距离旨在包括测量误差内的相似值。
[0078]
尽管已经描述了某些实施例,但是这些实施例仅通过示例的方式给出,并且不意图限制本公开的范围。实际上,本文描述的新颖的装置,系统和方法可以以多种其他形式来
体现。此外,在不脱离本公开的精神的情况下,可以对本文所述的方法和系统的形式进行各种省略、替换和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。