1.本发明属于μn级变推力要求的无拖曳航天器技术领域,尤其涉及一种多传感器融合的压电冷气变推力闭环调控装置。
背景技术:
2.无拖曳航天器通常需要可调的微小推力实时来抵消外部干扰。轨道高低,太阳光压及宇宙粒子光压的影响,外部干扰的特点主要体现为推力范围宽且小至微牛量级(跨四个量级,10
‑1~103μn)、高分辨率连续可调(微牛甚至亚微牛量级)、需要高精度实现实时推力输出以及要求推力噪声功率谱密度极低。由于这些特点,导致控制对象呈现出以下几个特点:由于跨流域,控制目标强非线性;非线性跨域流体大时延特性和实时调控矛盾尖锐;温度/压力微扰动、迟滞等多类常规可忽略的微变因素比重凸显。此时,通过单一物理量反馈实现高精度的推力调控已不可行。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供了一种多传感器融合的压电冷气变推力闭环调控装置,有效的解决了强非线性控制目标跨流域高精度调控的问题,通过采用压电精密驱动、温度、流量传感器交互补偿实现了推力跨流域高精度补偿难题。
4.本发明目的通过以下技术方案予以实现:一种多传感器融合的压电冷气变推力闭环调控装置,包括:出口温度传感器、喷嘴座、密封座、压块、阀芯组件、密封盖、压电驱动器、驱动杆、驱动器传力螺母、驱动器预紧碟簧、推力器外壳、入口温度传感器、、流量传感器组件、引线、模块压盖、模块外壳、位移传感器组件和压电驱动器座;其中,所述喷嘴座的一端面的一侧开设有槽,出口温度传感器位于槽中,采用粘接的方法固定在喷嘴座中;所述喷嘴座的内部中空,所述密封座的一端和所述喷嘴座接触,所述密封座的另一端和所述压块接触;所述压块压至密封座后通过焊接与所述喷嘴座连接;所述阀芯组件位于喷嘴座内部内孔中,所述阀芯组件的一端和喷嘴座内部内孔台阶接触,所述阀芯组件的另一端和密封盖接触;所述密封盖将阀芯组件压至喷嘴座内部内孔台阶后,通过焊接方式与喷嘴座连接;所述压电驱动器的一端与压电驱动器座接触,所述压电驱动器的另一端与驱动器传力螺母接触;所述驱动杆的入口端处于推力器外壳的内孔中;所述驱动器传力螺母通过螺纹和所述驱动杆连接,通过螺纹可以调节驱动杆的一端与阀芯组件的间距;所述驱动器预紧碟簧的一端与所述推力器外壳的内控台阶接触,所述驱动器预紧碟簧的另一端与所述驱动器传力螺母的上台阶接触,驱动器传力螺母压至压电驱动器上;所述推力器外壳的内部中空,所述推力器外壳的一端与喷嘴座连接;所述推力器外壳的壁面开设有空槽,所述压电驱动器驱动所需的引线从推力器外壳的空槽处引出;所述入口温度传感器粘接在推力器外壳的入口端;所述流量传感器组件的一端与推力器外壳插接,所述流量传感器组件的另一端与模块压盖连接;所述引线位于压盖端面出口,所述引线分别与压电驱动器、流量传感器组件及位移传感器组件上电极通过焊接连接;所述压盖内孔部分与流量传感器组件的入口端连接固
定,所述压盖的另一端与模块外壳连接;所述模块外壳套设于推力器外壳和流量传感器组件的外表面,上端与压盖固接;模块外壳内部中空设有台阶;所述位移传感器组件分别与驱动杆及推力器外壳固接推力器外壳相连接。压电驱动器座套设于喷嘴座外,处于喷嘴座与推力器外壳的空腔中。压电驱动器座内壁与一端与喷嘴座接触,另一端与压电驱动器连接。驱动器预紧碟簧通过驱动器传力螺母将压电驱动器压紧至压电驱动器座中。
5.上述多传感器融合的压电冷气变推力闭环调控装置中,还包括:密封座o型圈;其中,所述密封座o型圈位于密封座侧面的凹槽中,且处于喷嘴座内部内孔和密封座之间。
6.上述多传感器融合的压电冷气变推力闭环调控装置中,还包括:驱动杆出口o型圈;其中,所述驱动杆出口o型圈位于驱动杆侧面的凹槽中,且处于密封盖的内部内孔和驱动杆之间。
7.上述多传感器融合的压电冷气变推力闭环调控装置中,还包括:流量传感器o型圈;其中,所述流量传感器o型圈位于流量传感器组件出口端侧面的凹槽中,且处于推力器外壳入口端内孔和流量传感器组件之间。
8.上述多传感器融合的压电冷气变推力闭环调控装置中,还包括:驱动杆入口o型圈;其中,所述驱动杆入口o型圈位于驱动杆侧面的凹槽中,且处于推力器外壳的内孔和驱动杆之间。
9.上述多传感器融合的压电冷气变推力闭环调控装置中,所述阀芯组件包括销钉、压环、弹簧和阀芯;其中,压环将弹簧压至在阀芯上,弹簧设置于压环与阀芯中间,销钉将压环和阀芯连接在一起。
10.上述多传感器融合的压电冷气变推力闭环调控装置中,所述流量传感器组件包括流量传感器处理电路、流量传感器基座、流量传感器敏感头和流量传感器壳体;其中,所述流量传感器处理电路通过焊接与流量传感器基座的引脚连接;所述流量传感器敏感头粘接在流量传感器基座上;事实流量传感器基座固接在流量传感器壳体封装形成流体通道密封腔体。
11.上述多传感器融合的压电冷气变推力闭环调控装置中,所述位移传感器组件包括流量位移传感器处理电路、位移传感器静子和位移传感器动子;其中,所述位移传感器处理电路分别与位移传感器静子和位移传感器动子中的引线通过焊接连接;所述位移传感器处理电路与所述位移传感器静子通过螺钉分别固接在推力器外壳上;所述位移传感器动子固接在驱动杆上。
12.上述多传感器融合的压电冷气变推力闭环调控装置中,所述驱动杆轴线方向贯穿孔为流道;所述流道出口端呈勾形伸入阀芯组件的阀芯中,阀芯靠近驱动杆端内部设有花形孔;当驱动杆伸入孔内转动0
‑
60
°
之间的角度,完成和阀芯的装配;驱动杆一端勾状结构和阀芯内孔轴向方向入口端垂直壁面的距离为非工作气隙;当驱动杆往轴向入口方向运动时,当运动距离大于非工作气隙则带动阀芯组件运动。
13.上述多传感器融合的压电冷气变推力闭环调控装置中,压电驱动器的输出位移与驱动电压成线性比例关系,当给压电驱动器施加电压时,压电驱动器按比例变长,同时位移传感器动子往入口端运动;当减少压电驱动器上电压时,压电驱动器按比例变短,此时带动位移传感器动子往出口端运动。
14.本发明与现有技术相比具有如下有益效果:
15.(1)本发明通过出口温度传感器、入口温度传感器、流量传感器组、位移传感器组件创造性的利用温度、流量、位移传感器等反馈信号对中间控制量位移、流量等信号进行了控制和补偿,提出了一种基于温度、位移、流量传感器的压电冷气变推力闭环调控模块结构。从而保证了最终控制量
‑
推力精度,也为不同的控制模式提供了可能,提高了模块的可靠性;
16.(2)本发明通过位移传感器组件实现了对驱动器的高精度位移反馈,将位移传感器的静子和动子分别与推力器壳体及提升杆固定在一起,引入了位移反馈信号,提供了多种控制模式;
17.(3)本发明通过流量传感器组件建立了流量与推力的直接关系,通过温度传感器组件修正了流量与推力的关系,达到了高精度推力控制的目的;
18.(4)本发明通过化模块设计方案达到了抗干扰强、抗力学环境能力强的特点;
19.(5)本发明提出的基于波纹管隔离及蠕变补偿结构的压电比例推力器本质也是一种高精度的流体控制装置,不仅仅对未来电推贮供流量控制模块有借鉴意义,也可以广泛的应用于半导体制造、医疗、生化等高精尖民用领域,产生巨大的经济效益。
附图说明
20.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
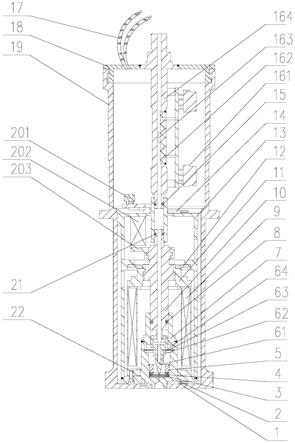
21.图1是本发明实施例提供的多传感器融合的压电冷气变推力闭环调控装置的结构示意图;
22.图2是本发明实施例提供的阀芯组件结构示意图;
23.图3是本发明实施例提供的流量传感器组件结构示意图;
24.图4是本发明实施例提供的位移传感器组件结构示意图;
25.图5是本发明实施例提供的流体流动路径结构示意图。
具体实施方式
26.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
27.图1是本发明实施例提供的多传感器融合的压电冷气变推力闭环调控装置的结构示意图。如图1所示,该多传感器融合的压电冷气变推力闭环调控装置包括出口温度传感器1、喷嘴座2、密封座3、密封座o型圈4、压块5、阀芯组件6、密封盖7、驱动杆出口o型圈8、压电驱动器9、驱动杆10、驱动器传力螺母11、驱动器预紧碟簧12、推力器外壳13、入口温度传感器14、流量传感器o型圈15、流量传感器组件16、引线17、模块压盖18、模块外壳19、位移传感器组件20、驱动杆入口o型圈21和压电驱动器座22。
28.喷嘴座2一端面一侧有槽,出口温度传感器1位于槽中,采用粘接的方法固定在喷
嘴座2中;喷嘴座2内部中空,密封座3一端和喷嘴座2接触,另一侧和压块5接触;压块5压紧密封座后通过焊接与喷嘴座2连接;密封座o型圈4位于密封座3侧面的凹槽中,且处于喷嘴座2内部内孔和密封座3之间;阀芯组件6位于喷嘴座2内部内孔中,一端和喷嘴座2内部内孔台阶接触,一端和密封盖7接触;密封盖7将阀芯组件6压紧至喷嘴座2内部内孔台阶后,通过焊接方式与喷嘴座2连接;驱动杆出口o型圈8位于驱动杆10侧面的凹槽中,且处于密封盖7内部内孔和驱动杆10之间;压电驱动器9一端与压电驱动器座21接触,另一端与驱动器传力螺母11接触;驱动杆10在入口端处于推力器外壳13内孔中,驱动杆入口o型圈位于驱动杆10侧面的凹槽中,且处于推力器外壳13内部内孔和驱动杆10之间;驱动器传力螺母11通过螺纹和驱动杆10连接,通过螺纹可以调节驱动杆10一端与阀芯组件6的间距;驱动器预紧碟簧12一端与推力器外壳13内控台阶接触,一端与驱动器传力螺母11上台阶接触,将驱动器传力螺母11压紧至压电驱动器9上;推力器外壳13内部中空,一端与喷嘴座2连接,上述密封座3、密封座o型圈4、压块5、阀芯组件6、密封盖7、驱动杆出口o型圈8、压电驱动器9、驱动杆10、驱动器传力螺母11、驱动器预紧碟簧12都位于两者连接形成的内孔中;推力器外壳13壁面有空槽,压电驱动器9驱动所需的引线从推力器外壳13壁面空槽处引出;入口温度传感器14粘接在推力器外壳13入口端;流量传感器o型圈15位于流量传感器组件16出口端侧面的凹槽中,且处于推力器外壳13入口端内孔和流量传感器组件16之间;流量传感器组件16一端与推力器外壳13插接连接,一端与模块压盖18连接;引线17位于压盖18端面出口,与压电驱动器9、流量传感器组件16及位移传感器组件20上电极分别通过焊接连接;压盖18内孔部分与流量传感器组件16入口端连接固定,另一端与模块外壳19连接;模块外壳19套设于各零件的外表面,上端与压盖18固接;模块外壳19内部中空设有台阶;位移传感器组件20各部分别与驱动杆10及推力器外壳13固接推力器外壳13上;驱动杆10轴线方向贯穿孔为流道;其流道出口端呈勾形伸入阀芯组件6的阀芯64中,阀芯64靠近驱动杆10端内部设有花形孔;当驱动杆10伸入孔内转动0
‑
60
°
之间的角度,完成和阀芯64的装配;驱动杆10一端勾状结构和阀芯64内孔轴向方向入口端垂直壁面的距离为非工作气隙a;当驱动杆10往轴向入口方向运动时,当运动距离大于非工作气隙a则带动阀芯组件6运动。压电驱动器座22套设于喷嘴座2外,处于喷嘴座2与推力器外壳13的空腔中。压电驱动器座22内壁与一端与喷嘴座2接触,另一端与压电驱动器9连接。驱动器预紧碟簧12通过驱动器传力螺母11将压电驱动器9压紧至压电驱动器座22中。
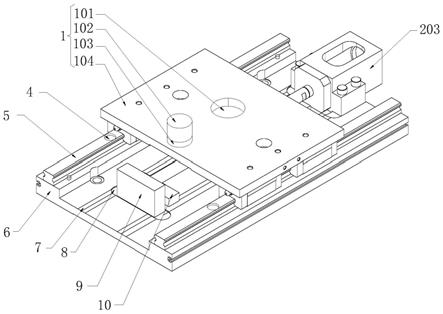
29.位移传感器组件20包括流量位移传感器处理电路201、位移传感器静子202和位移传感器动子203;位移传感器处理电路201与位移传感器静子202和位移传感器动子203中的引线通过焊接连接;位移传感器处理电路201与位移传感器静子202通过螺钉固接在推力器外壳13上位移传感器动子203固接在驱动杆10上。
30.如图2所示,阀芯组件6包括销钉61、压环62、弹簧63和阀芯64;其中,压环62将弹簧63压紧在阀芯64上,即弹簧63在压环62与阀芯64中间,然后通过销钉61将压环62和阀芯64连接在一起;阀芯64一端是内孔主要和驱动杆10配合;另一端是针形与密封座3接触一起构成密封副。
31.如图3所示,流量传感器组件16包括流量传感器处理电路161、流量传感器基座162、流量传感器敏感头163和流量传感器壳体164;其中流量传感器处理电路161通过焊接与流量传感器基座162上引脚连接;流量传感器敏感头163粘接在流量传感器基座162上;流
量传感器基座162固接在流量传感器壳体164封装成流体通道密封腔体。其入口端接外部气源,出口端接下游推力器。
32.如图4所示,位移传感器组件20包括流量位移传感器处理电路201、位移传感器静子202和位移传感器动子203;位移传感器处理电路201与位移传感器静子202和位移传感器动子203中的引线通过焊接连接;位移传感器处理电路201与位移传感器静子202通过螺钉固接在推力器外壳13上;所述位移传感器动子203固接在驱动杆10上。
33.如图5所示,流体路径为:从入口端依次经由流量传感器组件16、推力器外壳13入口端、驱动杆10、阀芯组件6、密封座3,最后通过喷嘴座2喷出形成推力。流体不与压电驱动器9接触。
34.出口温度传感器1、喷嘴座2、密封座3、压块5、销钉61、压环62、弹簧63和阀芯64、密封盖7、驱动杆10、驱动器传力螺母11、驱动器预紧碟簧12、推力器外壳13、入口温度传感器14、流量传感器基座162、和流量传感器壳体164、模块压盖18、模块外壳19、位移传感器静子202和位移传感器动子203和压电驱动器座22。密封座o型圈4、驱动杆出口o型圈8、压电驱动器9、流量传感器o型圈15、流量传感器敏感头163、引线17、驱动杆入口o型圈21为非金属;流量传感器基座162为金属与非金属的复合材料;流量传感器处理电路161与流量位移传感器处理电路201为电路。
35.压电驱动器9的长度与驱动电压成线性比例关系,当给压电驱动器9施加电压时,压电驱动器9按比例变长,同时位移传感器动子203往入口端运动;当减少压电驱动器9上电压时,压电驱动器9按比例变短,此时带动位移传感器动子203往出口端运动。
36.流量传感器组件16布置在压电冷气变推力闭环调控模块入口端,用于闭环控制推力的问题。
37.位移传感器组件20中位移传感器动子203用于反馈压电驱动器9位移,用于解决压电驱动器9蠕变,实现位移的高精度调节。
38.出口温度传感器1与入口温度传感器14,用于反馈模块温度,为温度引起的流量偏差、推力偏差、结构偏差提供补偿所需的温度信息。
39.模块外壳19套设于各零件的外表面,采用一体化模块设计,用于解决传统各部组件连接方式抗干扰弱、抗力学环境差的问题。
40.本实施例还提供了一种多传感器融合的压电冷气变推力闭环调控模块制备方法,该方法包括如下步骤:首先将喷嘴座、密封座、密封座o型圈、压块、阀芯组件依次放入喷嘴座内腔中,通过压块压紧。压块和喷嘴座固接;然后将压电驱动器座、压电驱动器、驱动杆出口o型圈、驱动杆依次装入,并放置驱动器预紧碟簧;接着将位移传感器组件各组件安装在推力器外壳和驱动杆上;再接着将上述装配组件套设上述装配组件上,其中推力器外壳下端与喷嘴座一端固接;然后将流量传感器o型圈装在流量传感器组件上,插入推力器外壳入口端内孔中;最后将上述装配体套入模块外壳中并将喷嘴座与模块外壳一端固接;最后将模块压盖与模块外壳外径端固接。
41.本实施例的多传感器融合的压电冷气变推力闭环调控装置的工作过程如下:
42.压电驱动器9不加电的状态下,弹簧63和驱动器预紧碟簧12处于压缩状态。
43.当压电驱动器9引线17建立工作电压或工作电流时,由于压电驱动器9输出位移和施加在其上的电压呈线性关系,当输出位移压电驱动器9随着电压的增大而逐步增大;由于
压电驱动器9在驱动器预紧碟簧12的作用下与驱动器传力螺母11连接,驱动器传力螺母11通过螺纹和驱动杆10固接。当压电驱动器9运动时,驱动杆10也随之一起运动,从而将阀芯组件6提起,将推力器打开。当压电驱动器9减少电压或电流时,压电驱动器9长度随着电流或者电压的下降开始变短,此时同理驱动杆10朝着喷嘴座2方向运动,此时阀芯组件6,在弹簧63及流体作用力的合力下实现复位。
44.在多传感器融合实现高精度方面,通过流量传感器组件16闭环反馈可以实现推力的高精度调节;通过出口温度传感器1及入口温度传感器14可以提高流量传感器组件16的测量精度;通过位移传感器组件20可以实现多模式控制提高响应速度;通过口温度传感器1及入口温度传感器14可以修正位移传感器组件20的初始位置,实现推力器的快速响应。基于波纹管隔离及蠕变补偿结构的压电比例推力器本质也是一种高精度的流体控制装置,不仅仅对未来电推贮供流量控制模块有借鉴意义,也可以广泛的应用于半导体制造、医疗、生化等高精尖民用领域。
45.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。