1.本发明涉及一种无叶片风力发电机监测控制装置及控制方法。
背景技术:
2.随着煤炭、石油、天然气等传统能源的不断消耗以及环境问题的日益严峻,人们越发重视可再生、清洁能源的开发和利用。风能因总量大、无污染等优势,使得风力发电技术吸引了世界各国的高度重视与研究。
3.日前,风力发电技术以叶片带动发电机进行发电为主,但其制造、维修、安装成本较高,且易受风向限制,同时土地使用率低、噪声大、影响生态等缺点,限制了该项技术的广泛推广,风力发电主要以风场为单位进行集中式布置。
4.利用卡门涡街现象提出的无叶片风力发电机具有结构紧凑、制造维修成本低、噪声小等优点,可以有效提升风能的利用率,且满足分布式布置的要求。这种无叶片风力发电机的基本原理是当一定条件下的来流绕过风力发电机的捕能柱时,产生的旋涡会在捕能柱两侧周期性脱落,出现卡门涡街现象,并对捕能柱产生一个交变的横向作用力,使得捕能柱振动,来流中动能被转化为机械能,进而利用机械能进行发电。但捕能柱的振动幅度与来流风速和无叶片风力发电机的固有属性有关。当风速较大时,振动幅度过大会导致风力发电机结构损坏,甚至失效,而当风速较低时,因旋涡脱落产生的交变作用力无法使捕能柱产生振动,风力发电机不工作,降低了风能利用率。另外,为充分提升风能利用率,捕能柱壳体一般采用碳纤维或轻型玻璃钢等材料制成以降低捕能柱的质量,当碳纤维或轻型玻璃钢制成的捕能柱壳体裂纹、缝隙时,如果继续工作,裂纹、缝隙进一步扩大会降低无叶片风力发电机的风能捕获率,甚至使得无叶片风力发电机失效。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种结构简单、工作可靠的无叶片风力发电机监测控制装置,并提供其控制方法。
6.本发明解决上述问题的技术方案是:一种无叶片风力发电机监测控制装置,包括捕能系统、复位和辅助启动系统、制动系统、能量传递系统、能量转化系统、监测及控制系统;
7.所述捕能系统包括捕能柱壳体、捕能柱杆、安装支架;捕能柱壳体固定于安装支架上,捕能柱杆和捕能柱安装支架固联,当来风绕过捕能柱壳体时,在捕能柱壳体后面两侧形成交替脱落的旋涡,导致捕能柱壳体产生涡激振动,而后捕能柱壳体通过安装支架带动捕能柱杆振动,从而使风能转变为捕能系统的机械能;
8.所述捕能柱杆下端与上端第一连杆固联,第一连杆下端连接能量传递系统,将第一连杆的周期性振动转化为上下往复运动,从而实现机械能量传递;
9.能量传递系统下端连接能量转化系统,通过上下往复运动实现机械能向电能的转化,使得由捕能系统从风能中捕获的机械能转化为电能;
10.所述第一连杆上设有复位和辅助启动系统、制动系统;
11.所述监测及控制系统用于检测和控制整个装置的工作状态。
12.上述无叶片风力发电机监测控制装置,所述能量传递系统包括球面副安装支架、第二连杆,捕能柱杆将捕能系统的振动机械能传递给第一连杆,第一连杆下端具有两个球面,第一个球面和球面副安装支架配合,构成第一球面副,第一球面副起支撑点作用,在保留第一连杆左右周期性振动的同时,限制了其水平方向的移动;第一连杆的第二个球面和第二连杆上端相连构成第二球面副,第二连杆下端副面和发电机动子驱动杆相连构成第三球面副;在第一球面副、第二球面副、第三球面副的共同作用下,第二连杆传递的周期性振动转化为发电机动子驱动杆沿轴线方向的上下往复运动,从而实现机械能量传递。
13.上述无叶片风力发电机监测控制装置,所述能量转化系统包括发电机筒体、安装底座、安装盘、发电机动子、发电机定子、发电机外壳,所述发电机筒体固定在安装底座上,发电机筒体下部内壁上设有安装盘,发电机外壳固定设置在安装盘上,发电机定子固定于发电机外壳,发电机动子位于发电机定子内侧,发电机动子驱动杆和发电机动子固联;当发电机动子驱动杆带动发电机动子上下往复运动时,发电机动子和发电机定子相互做用,切割磁感线,产生电流,从而实现机械能向电能的转化,使得由捕能系统从风能中捕获的机械能转化为电能。
14.上述无叶片风力发电机监测控制装置,所述复位和辅助启动系统包括复位系统安装筒、复位弹簧、复位弹簧安装筒、第一电磁线圈、第二电磁线圈、第三电磁线圈和辅助复位磁铁,所述复位弹簧安装筒套装固定在第一连杆上,辅助复位磁铁固定在复位弹簧安装筒上,复位弹簧安装筒外侧套设复位系统安装筒,复位系统安装筒下端与发电机筒体固联,多个复位弹簧沿复位弹簧安装筒周向均匀布置,复位弹簧一端和复位系统安装筒固联,另一端和复位弹簧安装筒固联;位于同一水平面上的第一电磁线圈、第二电磁线圈、第三电磁线圈均匀布置于复位系统安装筒内壁上,第一电磁线圈、第二电磁线圈、第三电磁线圈线路中的继电器与监测及控制系统相连;第一连杆在捕能系统带动下绕第一球面副摆动时,复位弹簧被反复拉、压,复位弹簧的合力与第一连杆的摆动方向相反使第一连杆复位,进而实现捕能系统绕第一球面副周期性摆动。
15.上述无叶片风力发电机监测控制装置,所述制动系统包括安装圆筒、制动片、液压油罐、液压泵、液压电机、液压执行元件、液压管路和制动圆筒,所述安装圆筒固定设置于复位系统安装筒与发电机筒体之间,所述制动圆筒固定在第一连杆上,制动圆筒外侧套设安装板,安装板与安装圆筒固联,安装板上设有制动片、液压油罐、液压泵、液压电机、液压执行元件和液压管路,液压油罐通过液压管路与液压执行元件相连,液压管路上设有液压泵,液压电机与液压泵、监测及控制系统相连,液压执行元件与多个制动片相连,多个制动片分布于制动圆筒四周;液压电机控制液压泵,将机械能转化为液压油的动能,且通过液压管路输送至液压执行元件,在液压执行元件的驱动下均匀分布的制动片以相同的速度向第一连杆初始轴线运动,直至制动片和制动圆筒接触,进行制动。
16.上述无叶片风力发电机监测控制装置,所述监测及控制系统包括第一激光传感器、第二激光传感器、第三激光传感器、风速传感器、风向传感器、光照传感器和微处理器,第一激光传感器、第二激光传感器、第三激光传感器均匀布置于复位系统安装筒上且处于同一水平面,第一激光传感器、第二激光传感器、第三激光传感器分别测量第一激光传感
器、第二激光传感器、第三激光传感器与第一连杆的距离,并将距离转化成数字信号后传递至微处理器;风速传感器和风向传感器布置于风场中,分别测量来风风速和来风方向,并将来风风速和来风方向转化成数字信号后传递至微处理器,多个光照传感器均匀布置在安装支架上,光照传感器检测到的光强信号传递至微处理器,微处理器对接受到的信号进行分析后输出控制信号至复位和辅助启动系统、制动系统,控制复位和辅助启动系统、制动系统工作。
17.上述无叶片风力发电机监测控制装置,所述捕能柱杆上端设有配重块,捕能柱壳体上设有加强筋。
18.上述无叶片风力发电机监测控制装置,所述制动片呈阶梯状。
19.一种无叶片风力发电机监测控制方法,包括以下步骤:
20.步骤一:光照传感器实时检测捕能柱壳体内部光照,并将光照强度信号送入微处理器;
21.步骤二:微处理器判断光照强度是否小于或等于额定光照强度,若是,则无叶片风力发电机正常工作,否则进入步骤三;
22.步骤三:微处理器将结果经总线传递至网关,网关再通过无线或光纤传递至交互界面,提醒操作人员;微处理器同时发出制动指令至制动系统,控制无叶片风力发电机停止工作;
23.步骤四:微处理器判断是否收到重启启动指令,若是,则向制动系统发动取消制动指令,无叶片风发力电机重新启动,否则无叶片风力发电机仍旧停止工作。
24.上述无叶片风力发电机监测控制方法,还包括:当无叶片风力发电机需常规检修或其他需要停机操作时,操作人员通过交互界面直接输入停机指令,微处理器在接收到停机指令后向制动系统发送制动指令,制动片对第一连杆进行制动,进而实现无叶片风力发电机的停机操作。
25.本发明的有益效果在于:本发明的无叶片风力发电机监测控制装置结构紧凑,且采用模块化设计,制造、安装、维修成本低。本发明的控制方法能根据具体的工况,实现无叶片风力发电机的自动控制,且用户可远程对无叶片风力发电机进行监测,满足其分布式布置的要求,同时扩大了无叶片风力发电机的工作风速范围,提高了风能利用率。
附图说明
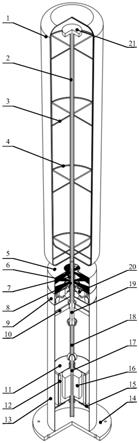
26.图1是本发明控制装置的整体结构示意图。
27.图2是能量传递系统结构示意图。
28.图3是复位和辅助启动系统结构示意图。
29.图4是第一连杆瞬时位置计算原理图。
30.图5是辅助复位原理图。
31.图6是辅助启动原理图。
32.图7是制动系统结构示意图。
33.图8是制动系统制动示意图。
34.图9是制动片主视图。
35.图10是制动片左视图。
36.图11是制动片俯视图。
37.图12是捕能柱壳体监测和控制原理图。
38.图13是监测和控制系统原理图。
具体实施方式
39.下面结合附图和实施例对本发明作进一步的说明。
40.如图1所示,一种无叶片风力发电机监测控制装置,包括捕能系统、复位和辅助启动系统、制动系统、能量传递系统、能量转化系统、监测及控制系统;
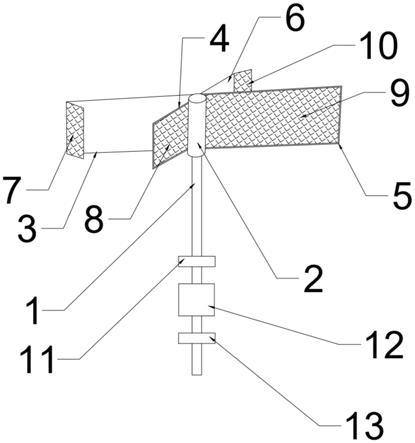
41.所述捕能系统包括捕能柱壳体1、捕能柱杆2、安装支架3;捕能柱壳体1固定于安装支架3上,捕能柱杆2和捕能柱安装支架3固联,捕能柱杆2上端设有配重块21;另外为增强捕能柱壳体1的强度,在捕能柱壳体1上设有加强筋4;当来风绕过捕能柱壳体1时,在捕能柱壳体1后面两侧形成交替脱落的旋涡,导致捕能柱壳体1产生涡激振动,而后捕能柱壳体1通过安装支架3带动捕能柱杆2振动,从而使风能转变为捕能系统的机械能;
42.所述捕能柱杆2下端与上端第一连杆19固联,第一连杆19下端连接能量传递系统,将第一连杆19的周期性振动转化为上下往复运动,从而实现机械能量传递;
43.能量传递系统下端连接能量转化系统,通过上下往复运动实现机械能向电能的转化,使得由捕能系统从风能中捕获的机械能转化为电能;
44.所述第一连杆19上设有复位和辅助启动系统、制动系统;
45.所述监测及控制系统用于检测和控制整个装置的工作状态。
46.如图2所示,所述能量传递系统包括球面副安装支架10、第二连杆18,捕能柱杆2将捕能系统的振动机械能传递给第一连杆19,第一连杆19下端具有两个球面,第一个球面和球面副安装支架10配合,构成第一球面副34,第一球面副34起支撑点作用,在保留第一连杆19左右周期性振动的同时,限制了其水平方向的移动;第一连杆19的第二个球面和第二连杆18上端相连构成第二球面副35,第二连杆18下端副面和发电机动子驱动杆17相连构成第三球面副36;在第一球面副34、第二球面副35、第三球面副36的共同作用下,第二连杆18传递的周期性振动转化为发电机动子驱动杆17沿轴线方向的上下往复运动,从而实现机械能量传递。
47.所述能量转化系统包括发电机筒体13、安装底座14、安装盘15、发电机动子16、发电机定子12、发电机外壳11,所述发电机筒体13固定在安装底座14上,发电机筒体13下部内壁上设有安装盘15,发电机外壳11固定设置在安装盘15上,发电机定子12固定于发电机外壳11,发电机动子16位于发电机定子12内侧,发电机动子16驱动杆和发电机动子16固联;当发电机动子驱动杆17带动发电机动子16上下往复运动时,发电机动子16和发电机定子12相互做用,切割磁感线,产生电流,从而实现机械能向电能的转化,使得由捕能系统从风能中捕获的机械能转化为电能。
48.如图3所示,所述复位和辅助启动系统包括复位系统安装筒5、复位弹簧6、复位弹簧安装筒8、第一电磁线圈22、第二电磁线圈23、第三电磁线圈24和辅助复位磁铁7,所述复位弹簧安装筒8套装固定在第一连杆19上,辅助复位磁铁7固定在复位弹簧安装筒8上,复位弹簧安装筒8外侧套设复位系统安装筒5,复位系统安装筒5下端与发电机筒体13固联,多个复位弹簧6沿复位弹簧安装筒8周向均匀布置,复位弹簧6一端和复位系统安装筒5固联,另
一端和复位弹簧安装筒8固联;位于同一水平面上的第一电磁线圈22、第二电磁线圈23、第三电磁线圈24均匀布置于复位系统安装筒5内壁上,第一电磁线圈22、第二电磁线圈23、第三电磁线圈24线路中的继电器与监测及控制系统相连;第一连杆19在捕能系统带动下绕第一球面副34摆动时,复位弹簧6被反复拉、压,复位弹簧6的合力与第一连杆19的摆动方向相反使第一连杆19复位,进而实现捕能系统绕第一球面副34周期性摆动。
49.所述监测及控制系统包括第一激光传感器25、第二激光传感器26、第三激光传感器27、风速传感器、风向传感器、光照传感器和微处理器,第一激光传感器25、第二激光传感器26、第三激光传感器27均匀布置于复位系统安装筒5上且处于同一水平面,第一激光传感器25、第二激光传感器26、第三激光传感器27分别测量第一激光传感器25、第二激光传感器26、第三激光传感器27与第一连杆19的距离,并将距离转化成数字信号后传递至微处理器;风速传感器和风向传感器布置于风场中,分别测量来风风速和来风方向,并将来风风速和来风方向转化成数字信号后传递至微处理器,多个光照传感器均匀布置在安装支架3上,光照传感器检测到的光强信号传递至微处理器,微处理器对接受到的信号进行分析后输出控制信号至复位和辅助启动系统、制动系统,控制复位和辅助启动系统、制动系统工作。
50.如图7、图8所示,所述制动系统包括安装圆筒9、制动片20、液压油罐28、液压泵29、液压电机30、液压执行元件31、液压管路32和制动圆筒33,所述安装圆筒9固定设置于复位系统安装筒5与发电机筒体13之间,所述制动圆筒33固定在第一连杆19上,制动圆筒33外侧套设安装板,安装板与安装圆筒9固联,安装板上设有制动片20、液压油罐28、液压泵29、液压电机30、液压执行元件31和液压管路32,液压油罐28通过液压管路32与液压执行元件31相连,液压管路32上设有液压泵29,液压电机30与液压泵29、监测及控制系统相连,液压执行元件31与多个制动片20相连,多个制动片20分布于制动圆筒33四周;液压电机30控制液压泵29,将机械能转化为液压油的动能,且通过液压管路32输送至液压执行元件31,在液压执行元件31的驱动下均匀分布的制动片20以相同的速度向第一连杆19初始轴线运动,直至制动片20和制动圆筒33接触,进行制动。
51.如图4
‑
图6所示,第一连杆19在捕能系统带动下绕第一球面副34摆动时,复位弹簧6被反复拉、压,其合力与第一连杆19的摆动方向相反使其复位,进而实现捕能系统绕球面副1周期性摆动。
52.第一连杆19的摆动幅度l≥l
max
(l
max
是无叶片风力发电机正常工作时第一连杆极限摆动幅度,设计时确定)时,微处理器控制均匀分布于复位系统安装筒5上的第一电磁线圈22、第二电磁线圈23、第三电磁线圈24线路中的继电器,使其闭合,并通过控制线路中电阻的大小,调整第一电磁线圈22、第二电磁线圈23、第三电磁线圈24中的电流i1、i2、i3。通电的电磁线圈与辅助复位磁铁7相互吸引,产生与第一连杆19摆动方向相反的合力f(v
杆
‑
f关系图通过实验测量,并存储于微处理器),即辅助复位。并与复位弹簧6复位相结合,使得当第一连杆的摆动幅度l超过l
max
时捕能系统快速复位。当l≤l
max
时,微处理器控制第一电磁线圈22、第二电磁线圈23、第三电磁线圈24线路中的继电器断开,辅助复位不工作,仅复位弹簧6复位工作。
53.均匀布置于复位系统安装筒5上且处于同一水平面的第一激光传感器25、第二激光传感器26、第三激光传感器27分别测量第一连杆19与其距离l1、l2、l3,并将其转化为数字信号经总线传递至微处理器,微处理器通过如图4所示的原理计算出第一连杆19的振幅:以
3个激光传感器为圆心,以l1、l2、l3为半径画圆,3个圆的交点即为第一连杆19的瞬时位置,一个振动周期内,第一连杆19的瞬时位置与初始位置的最大距离即为振幅l,并通过确定第一连杆的的瞬时摆动速度v
杆
,δl和δt分别表示振幅l和时间t的变化量。
54.布置于风场中的风速传感器和风向传感器分别测量来风风速v
风
和来风方向,并将其转化为数字信号传递至微处理器。当v
风
小于无叶片风力发电机自启动的最小风速v
正min
且大于最小启动风速v
min
时,微处理器控制均匀分布于复位系统安装筒上的第一电磁线圈22、第二电磁线圈23、第三电磁线圈24线路中继电器,使其线路闭合,并通过控制线路中电阻的大小,调整第一电磁线圈22、第二电磁线圈23、第三电磁线圈24中的电流i1、i2、i3。通电的第一电磁线圈22、第二电磁线圈23、第三电磁线圈24与辅助复位磁铁7相互吸引,产生与风场风速方向重直的交变合力f'(v
风
‑
f'关系图通过实验测量,并存储于微处理器)。i1、i2、i3的计算原理如下:微处理器根据来风风速v
风
及其方向,根据v
风
‑
f'关系图确定f'大小,其方向与v
风
垂直,根据如图6所示方法,将f'分解为f1'、f2'、f3',而后通过电磁力计算公式得出i1、i2、i3。f'与因涡激振动而作用于捕能系统上的交变作用力共同作用下,使无叶片风力发电机克服系统固有阻尼,开使周期性振。当微处理器通过第一激光传感器25、第二激光传感器26、第三激光传感器27监测到捕能系统正常工作时,断开第一电磁线圈22、第二电磁线圈23、第三电磁线圈24线路中的继电器,辅助启动完成。
55.制动系统的待机状态如图7所示,此时制动片20和制动圆筒33不接触,第一连杆19可以绕第一球面副34摆动。当制动系统接收到来自微处理器的制动指令时,启动液压电机30,通过液压泵29将机械能转化为液压油的动能,且通过液压管路32输送至液压执行元件31,在液压执行元件31的驱动下四个均匀分布的制动片20以相同的速度向第一连杆19初始轴线运动,直至制动片20和制动圆筒33接触。此时第一连杆19被限制于其初始轴线上且无法摆动,如图8所示。此时无叶片风力发电机停止工作,“制动完成”信号通过总线反馈给微处理器。当制动系统接收到来自微处理器的取消制动指令时,液压系统泄压,制动片20在液压执行元件31的带动下,返回其初始位置,无叶片风力发电机恢复工作,同时“制动取消完成”信号通过总线反馈给微处理器。
56.第一连杆19绕球面副1周期性摆动,其摆动方向由来风方向决定,故是随机的。制动操作时,为避免制动片20向第一连杆19初始轴线移动时出现“卡杆(第一连杆19被卡在两制动片之间)”现象,本发明设计了如图9
‑
图11所示的阶梯状制动片,增加了制动片制动范围,使得制动片20在初始位置以及移动过程中,第一连杆19无法运动到制动片间的间隙中而出现“卡杆”现象。
57.如图12、图13所示,一种无叶片风力发电机监测控制方法,包括以下步骤:
58.步骤一:光照传感器实时检测捕能柱壳体1内部光照,并将光照强度信号送入微处理器。
59.步骤二:微处理器判断光照强度是否小于或等于额定光照强度,若是,则无叶片风力发电机正常工作,否则进入步骤三。
60.当捕能柱壳体1出现裂纹、缝隙等异常时,捕能柱壳体1内部出现光线异常,对应的光照传感器获取环境光强,并转化为数字信号经总线传递至微处理器。
61.步骤三:微处理器将结果经总线传递至网关,网关再通过无线或光纤传递至交互界面,提醒操作人员;微处理器同时发出制动指令至制动系统,控制无叶片风力发电机停止工作,避免危害进一步扩大。
62.步骤四:当故障解除后,操作人员可通过交互界面输入重新启动指令,微处理器判断是否收到重启启动指令,若是,则向制动系统发动取消制动指令,无叶片风发力电机重新启动,否则无叶片风力发电机仍旧停止工作。
63.另外,当无叶片风力发电机需常规检修或其他需要停机操作时,操作人员通过交互界面直接输入停机指令,微处理器在接收到停机指令后向制动系统发送制动指令,制动片20对第一连杆19进行制动,进而实现无叶片风力发电机的停机操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。