1.本发明涉及智能网联公交车路协同控制技术领域,尤其是涉及一种基于边缘计算的智能网联公交车路协同控制系统。
背景技术:
2.智能网联管控技术领域广泛采用车路协同技术对公共交通进行智能管控。智能车路协同系统简称车路协同系统,是智能交通系统(its)的最新发展方向,主要是通过多学科交叉与融合,采用无线通信、传感探测等先进技术手段,实现对人、车、路的信息的全面感知和车辆与基础设施之间、车辆与车辆之间的智能协同和配合,从而达到优化并利用系统资源、提高道路交通安全和效率、缓解道路交通拥挤的目标,从而推动交叉学科新理论、新技术、新应用等的产生与发展。
3.智能网联公交车由于自身车载设备、或者当前识别感知算法等的局限,无法对当前车辆行驶道路上的行人、障碍物、车辆等进行有效感知,无法采取有效操作进行减速或者停车避让操作,因此亟需一种路侧端车路协同控制系统。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种实时高效、响应速度快、功能丰富的基于边缘计算的智能网联公交车路协同控制系统。
5.本发明的目的可以通过以下技术方案来实现:
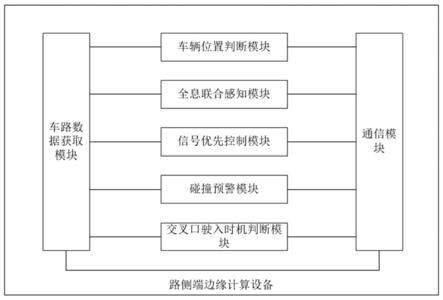
6.一种基于边缘计算的智能网联公交车路协同控制系统,所述的车路协同控制系统包括分别设置在路侧端边缘设备中的车路数据获取模块、车辆位置判断模块、全息联合感知模块、信号优先控制模块、碰撞预警模块和交叉口驶入时机判断模块;所述的车路数据获取模块分别与车辆位置判断模块、全息联合感知模块、信号优先控制模块、碰撞预警模块和交叉口驶入时机判断模块进行通信;
7.车路数据获取模块,用于获取智能网联公交车的车路数据;
8.车辆位置判断模块,用于根据车路数据获取当前车辆所在的交叉口,并从车路数据中筛选出有效数据;
9.全息联合感知模块,用于融合摄像头和雷达的目标物检测结果;
10.信号优先控制模块,用于交叉口数据对车辆进行提前控制;
11.碰撞预警模块,用于对车辆进行碰撞预警;
12.交叉口驶入时机判断模块,用于获取当前车辆的交叉口驶入时机。
13.优选地,所述的车路数据获取模块具体为:
14.通过布置于车辆以及道路上的传感设备获取来自于智能网联公交车自身数据、交叉口信号灯的实时相位数据以及来自摄像头与雷达的目标物的检测结果。
15.更加优选地,所述的智能网联公交车自身数据包括车辆定位数据、车速、加减速度和航向角;所述的交叉口信号灯实时相位数据包括当前信号灯状态和剩余时间;所述的目
标物检测结果包括目标物类型、定位信息、速度加速度和航向角。
16.优选地,所述的车辆位置判断模块具体为:
17.交叉口区域为多边形区域,使用几何查找的方法确定当前车辆所在交叉口,然后从步骤1获取的车路数据中筛选出当前交叉口以及邻近交叉口的相关数据作为有效数据。
18.优选地,所述的全息联合感知模块具体为:
19.首先计算两个目标物之间的距离:
[0020][0021]
其中,x1、y1、x2和y2分别为两个目标的横纵坐标值;
[0022]
当两者间的距离小于预设距离阈值时,进而判断两个目标物的航向角之差,若两个目标物的航向角之差小于预设航向角阈值,则判定两个目标物为同一个目标物;
[0023]
将所有目标物均进行上述处理,对摄像头和雷达获取的目标物检测结果进行去重。
[0024]
优选地,所述的信号优先控制模块具体为:
[0025]
通过与信号机、信号优先主机之前的通信,边缘计算设备可实时获取当前交叉口的所有信号灯的相位状态与当前相位剩余时间,从而进行信号优先控制边缘计算,实现相位提醒、车速引导、主动优先等具体的信号优先控制能力;
[0026]
在掌握车辆定位、车速信息,信号灯相位信息,并且结合交叉口的基本情况后,边缘计算设备便可以通过计算车辆到达交叉口的时间再基于路段对于车辆的限速,可以告知智能网联公交车以v的速度可以顺利通过交叉口;当车辆在加速后也无法通过交叉口则会提前通知智能网联公交车减速慢行,等待下一个相位通过。
[0027]
优选地,所述的碰撞预警模块具体为:
[0028]
将汇入车辆、盲区行人均简化为行驶中的车辆,碰撞预警模块判断在两车维持当前车速及行驶方向不变情况下,依据当前运动状态预测车辆未来运行轨迹,确定碰撞点及车辆碰撞时间,计算两车距离碰撞点的时间差进行判断是否存在碰撞危险;
[0029]
发生碰撞的前提条件为:两车距离碰撞点的时间差δt≥|t
a
‑
t
b
|,自车到达碰撞点的时间为t
a
,他车到达碰撞点所需的时间为t
b
;
[0030]
当满足δt≥|t
a
‑
t
b
|条件时,将自车与他车到达碰撞点的时间与各自车辆的安全防撞时间进行比较,判断是否需要进行预警显示;
[0031]
同时,计算车辆预计碰撞点位置,车辆进行停车避让操作。
[0032]
优选地,所述的交叉口驶入时机判断模块具体为:
[0033]
首先,计算交叉口内每条车道上所有交通参与者之间的距离;
[0034]
随后,推算智能网联公交车驶入交叉口的时间,同时获取所驶入车道在智能网联公交车驶入时路口距离智能网联公交车最近两辆车之间的空窗间隔时间;
[0035]
最后,将推算出的智能网联公交车驶入交叉口的时间与空窗间隔时间进行计算,若两者相减小于一定阈值,则智能网联公交车可以驶入该交叉口,反之,则需要智能网联公交车停车等待。
[0036]
优选地,所述的智能网联公交车路协同控制系统还包括用于与智能网联公交车进行通信的通信模块。
[0037]
更加优选地,所述的通信模块为采用v2x协议的通信模块。
[0038]
与现有技术相比,本发明具有以下有益效果:
[0039]
一、实时高效:本发明中的智能网联公交车路协同控制系统结合图像、雷达识别与信号灯数据,采用较少的算力需求,实现更广范围、更多场景的功能,为网联车辆实现智能网联公交车提供实时高效的提醒。
[0040]
二、响应速度快:本发明中的智能网联公交车路协同控制系统设置在路侧端边缘计算设备上,通过边缘计算产生更快的网络服务响应,满足实时业务、智能应用、安全与隐私保护等方面的需求,将原本需要在云端计算的服务交给边缘端解决,加快服务响应、减少云端带宽压力。
[0041]
三、功能丰富:本发明中的智能网联公交车路协同控制系统具有车辆位置判断、全息联合感知、信号优先控制、碰撞预警以及交叉口驶入时机判断等功能,丰富了车路协同控制系统的功能。
附图说明
[0042]
图1为本发明中智能网联公交车路协同控制系统的结构示意图;
[0043]
图2为本发明实施例中信号优先控制业务的流程示意图;
[0044]
图3为本发明实施例中侧面碰撞模型的示意图。
具体实施方式
[0045]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0046]
一种基于边缘计算的智能网联公交车路协同控制系统,其结构如图1所示,包括分别设置在路侧端边缘设备中的车路数据获取模块、车辆位置判断模块、全息联合感知模块、信号优先控制模块、碰撞预警模块和交叉口驶入时机判断模块;所述的车路数据获取模块分别与车辆位置判断模块、全息联合感知模块、信号优先控制模块、碰撞预警模块和交叉口驶入时机判断模块进行通信;
[0047]
车路数据获取模块,用于获取智能网联公交车的车路数据;
[0048]
车辆位置判断模块,用于根据车路数据获取当前车辆所在的交叉口,并从车路数据中筛选出有效数据;
[0049]
全息联合感知模块,用于融合摄像头和雷达的目标物检测结果;
[0050]
信号优先控制模块,用于交叉口数据对车辆进行提前控制;
[0051]
碰撞预警模块,用于对车辆进行碰撞预警;
[0052]
交叉口驶入时机判断模块,用于获取当前车辆的交叉口驶入时机。
[0053]
下面对各个模块进行详细描述:
[0054]
(1)车路数据获取模块
[0055]
通过布置于车辆以及道路上的传感设备获取来自于智能网联公交车自身数据、交叉口信号灯的实时相位数据以及来自摄像头与雷达的目标物的检测结果。
[0056]
智能网联公交车自身数据包括车辆定位数据、车速、加减速度和航向角;
[0057]
交叉口信号灯实时相位数据包括当前信号灯状态和剩余时间;
[0058]
目标物检测结果包括目标物类型、定位信息、速度加速度和航向角。
[0059]
(2)车辆位置判断模块
[0060]
目前边缘计算设备与智能网联公交车使用v2x协议进行通信,考虑到每个交叉口的大小不一,边缘计算设备会收到来自相邻交叉口车辆的数据。为了防止无效数据的产生,以及缓减相关v2x设备的通信压力,边缘计算设备需要根据智能网联公交车的定位数据来判断车辆是否在当前设备所属的交叉口范围内,再进行相关相关消息提醒。
[0061]
交叉口区域为多边形区域,使用几何查找的方法确定当前车辆所在交叉口,然后从步骤1获取的车路数据中筛选出当前交叉口以及邻近交叉口的相关数据作为有效数据。
[0062]
设当前车辆所在位置为q点,交叉口区域为多边形区域,判断点q是否在多边形内的方法为:
[0063]
以q为端点向任意方向作射线,由于多边形是有界的,所以射线一定会延伸到多边形外,若射线与多边形没有交点,则点在多边形外,若有1个交点,则在多边形内,若有两个交点,则在多边形外。
[0064]
推论:当射线与多边形的交点数目是奇数时,q在多边形内;若交点个数为偶数时,q在多边形外。
[0065]
另外,还有几种情况需要分类讨论,例如:
[0066]
1、多边形的水平边不做考虑。
[0067]
2、对于与多边形顶点相交,如果该顶点是其所属边上纵坐标比较大的顶点,则计数,否则忽略。
[0068]
3、对于q在多边形边上的情形,直接可判断q属于多边形。
[0069]
(3)全息联合感知模块
[0070]
通过大量路侧实验,发现激光雷达辅以摄像头的图像识别用于交通参与者的感知,能够大大提高感知精度。通过将摄像头识别的目标物与激光雷达识别检测结果进行融合计算,从而更精准可靠地识别出当前场景下的所有交通参与者,作为车路协同边缘计算控制的处理后输入数据
[0071]
通过多台设备识别检测目标物,各个设备会将同一目标物进行重复输出,导致目标感知结果异常,通过数据后融合边缘计算,实现路侧多源传感器的全息联合感知。本实施例通过计算两两目标物之间的距离辅以目标物的航向角进行去重计算,具体方法为:
[0072]
首先计算两个目标物之间的距离:
[0073][0074]
其中,x1、y1、x2和y2分别为两个目标的横纵坐标值;
[0075]
当两者间的距离小于预设距离阈值时,进而判断两个目标物的航向角之差,若两个目标物的航向角之差小于预设航向角阈值,则判定两个目标物为同一个目标物;
[0076]
将所有目标物均进行上述处理,对摄像头和雷达获取的目标物检测结果进行去
重。
[0077]
本实施例中的预设距离阈值设置具体为:机动车取2m,非机动车取1m,行人取0.5m。
[0078]
(4)信号优先控制模块
[0079]
如图2所示,信号优先控制模块通过与信号机、信号优先主机之前的通信,边缘计算设备可实时获取当前交叉口的所有信号灯的相位状态与当前相位剩余时间,从而进行信号优先控制边缘计算,实现相位提醒、车速引导、主动优先等具体的信号优先控制能力。
[0080]
在掌握车辆定位、车速信息,信号灯相位信息,并且结合交叉口的基本情况后,边缘计算设备便可以通过计算车辆到达交叉口的时间再基于路段对于车辆的限速,可以告知智能网联公交车以v的速度可以顺利通过交叉口;当车辆在加速后也无法通过交叉口则会提前通知智能网联公交车减速慢行,等待下一个相位通过。
[0081]
(5)碰撞预警模块
[0082]
通过安装在道路上的摄像头实时检测路面上的行人、机动车等目标物。结合智能网联公交车的定位数据,实时分析智能网联公交车与其自身识别检测设备无法感知目标物的运动轨迹,预测车辆是否有碰撞、冲突的风险,提醒智能网联公交车进行主动避让,避免事故的发生。
[0083]
鉴于智能网联公交车上会带有雷达、摄像头等目标检测设备,对于在其前后左右等目标物能够自行检测并加以判断避让。而在一些车辆盲区范围内的目标物(可以是侧方汇入的车辆,亦或是位于智能网联公交车检测盲区的行人等),智能网联公交车无法感知到,此时需要路侧设备加以辅助判断。此类状态下,车辆与目标物可以采用侧面碰撞算法加以预测、判断。
[0084]
后续为了方便计算,将汇入车辆、盲区行人都简化为行驶中的车辆。即在两车维持当前车速及行驶方向不变情况下,依据当前运动状态预测车辆未来运行轨迹,确定碰撞点及车辆碰撞时间,计算两车距离碰撞点的时间差进行判断是否存在碰撞危险。发生侧面碰撞的前提条件:两车距离碰撞点的时间差δt≥|t
a
‑
t
b
|,自车到达碰撞点的时间为t
a
,他车到达碰撞点所需的时间为t
b
;
[0085]
当满足δt≥|t
a
‑
t
b
|条件时,将自车与他车到达碰撞点的时间与各自车辆的安全防撞时间进行比较,判断是否需要进行预警显示;
[0086]
同时,计算车辆预计碰撞点位置,车辆进行停车避让操作。
[0087]
对于如图3所示的侧面碰撞模型来说,共有三种情况:
[0088]
1)当|θ1| |θ2|<90
°
时,自车与碰撞点距离为:
[0089]
s1=d
·
cos|θ1|
‑
d
·
sin|θ1|/tan(|θ1| |θ2|)
[0090]
他车与碰撞点的距离为:
[0091]
s2=d
·
sin|θ1|/sin(|θ1| |θ2|)
[0092]
2)当|θ1| |θ2|=90
°
时,自车与碰撞点距离为:
[0093]
s1=d
·
cos|θ1|
[0094]
他车与碰撞点的距离为:
[0095]
s2=d
·
cos|θ2|
[0096]
3)当|θ1| |θ2|>90
°
时,自车与碰撞点的距离为:
[0097]
s1=d
·
cos|θ1| d
·
sin|θ1|/tan(180
°‑
|θ1|
‑
|θ2|)
[0098]
他车与碰撞点的距离为:
[0099]
s2=d
·
sin|θ1|/sin(180
°‑
|θ1|
‑
|θ2|)
[0100]
当计算出预计碰撞点位置后,即表示智能网联公交车会与汇入车辆或盲区行人发生碰撞等情形。此时,边缘计算设备便会通过v2x设备通知智能网联公交车在某个区域内停车避让,从而减少交通事故的发生,提高道路通行效率。
[0101]
(6)交叉口驶入驶入时机判断模块
[0102]
通过融合多台激光雷达与摄像头可以实现对更大区域场景的监控,比如环形交叉口等大型复杂交叉口。通过整个环形交叉口的综合监控,便能实时掌握交叉口内所有交通参与者的位置、航向角、速度、加速度等信息。通过计算,可以辅助智能网联公交车快速安全的驶入并通过交叉口。
[0103]
首先,计算交叉口内每条车道上所有交通参与者之间的距离;
[0104]
随后,推算智能网联公交车驶入交叉口的时间,同时获取所驶入车道在智能网联公交车驶入时路口距离智能网联公交车最近两辆车之间的空窗间隔时间;
[0105]
最后,将推算出的智能网联公交车驶入交叉口的时间与空窗间隔时间进行计算,若两者相减小于一定阈值,则智能网联公交车可以驶入该交叉口,反之,则需要智能网联公交车停车等待。
[0106]
以环形交叉口为例,具体计算方法为:
[0107]
1、边缘计算设备收集来自视频监控检测范围内与激光雷达感知范围内的道路环境检测结果。
[0108]
2、计算环形交叉口内每条车道上,所有交通参与者之间的距离。由于场景是在环岛,需要计算的是两辆车的弧长。可以简化为,已经环岛中心点o以及这两辆车a、b的位置,求角aob的弧度值。将中心点o到车辆a、b的线段变成向量根据品面向量夹角公式便可计算得到:
[0109][0110]
对于车道到环岛中心点的距离是已知固定的为r,那么两车之间的距离则为:
[0111][0112]
4、根据智能网联公交车推算其驶入环形交叉口的时间并与计算到的车辆间隔时间做判断,若两者相减若小于一定阈值(根据环岛限速等条件确定)则可以允许智能网联公交车驶入并通过环岛,反之则需要智能网联公交车停车等待。
[0113]
本实施例中的智能网联公交车路协同控制系统还包括用于与智能网联公交车进行通信的通信模块,该通信模块采用v2x协议。
[0114]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替
换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。