1.本发明涉及清洁机器人技术领域,更具体的说,本发明涉及一种无人驾驶清洁机器人。
背景技术:
2.随着科技不断的发展,现代化设备越来越先进,为了能够降低人们的劳动强度,在清洁方面的智能设备也越来越多,目前广泛使用的吸尘器以及现在比吸尘器更为先进的清洁机器人都大大降低了清洁人员的劳动程度。
3.目前,清洁机器人的功能还不够完善,起尘刷无法有效对地面顽固污渍进行清理,在现有技术中有设置抹布对顽固污渍进行处理的,其效果不够明显,抹布不便实现自清洁,自动化程度低。
技术实现要素:
4.本发明旨在于解决现有技术中起尘刷无法有效对地面顽固污渍进行清理,在现有技术中有设置抹布对顽固污渍进行处理的,其效果不够明显,抹布不便实现自清洁,自动化程度低的技术问题。
5.本发明的目的与功效,由以下具体技术手段所达成:一种无人驾驶清洁机器人,包括机器人主体,机器人主体下端设有旋转的起尘刷,机器人主体底部设有进尘口,进尘口处活动设置清扫刷,机器人主体内部设有集尘室,机器人主体底部活动设置与地面接触的清洁布,机器人主体内部位于清洁布上端设有水腔,水腔内设置旋转的清洁辊,水腔上端位于清洁辊一侧设有导向辊,水腔上端位于清洁辊另一侧设有夹辊,夹棍上下设置两组,清洁布依次从导向辊上端、清洁辊下端、夹棍之间绕过,机器人主体内部位于清扫刷上端设有转动的刷辊,刷辊与清洁布外侧表面相接。
6.优选的,刷辊与清洁布相对转动设置。
7.优选的,清洁布外侧依次设有纳灰腔,清洁布外侧位于纳灰腔两侧呈弧形锯齿状,纳灰腔为橡胶材质。
8.优选的,机器人主体内部位于刷辊相对一侧转动设置有导向轮,导向轮外侧设有导尘管延伸至集尘室,集尘室内设有过滤器以及排气口。
9.优选的,集尘室内活动设置可拆卸的装灰斗。
10.优选的,机器人主体顶部设有控制器,控制器上端设有无线信号接收天线以及显示屏。
11.本发明提供一种无人驾驶清洁机器人路径规划方法,清洁机器人包括控制单元、人机交互模块、传感器模块、驱动模块和电源模块,人机交互模块、传感器模块、驱动模块和电源模块均匀控制单元连接设置,传感器模块用于分析并反馈实时清洁环境信息,清洁机器人还设置有定位模块和阴影比对模块,定位模块用于获取当前清洁机器人在环境地图上所在的位置,阴影比对模块用于比对当前环境清扫的侧重点,控制单元采用esp32wifi、蓝
牙双模中央控制单元,用于获取并处理外部环境信息,利用几何
‑
拓扑或对从机器人传感器上采集到的环境信息进行共性筛除、特征提取后,得到简单的几何信息特征或将环境分解成一系列离散的栅格,每个栅格有一个值,栅格包含了坐标、是否障碍两类基本信息,用每一个栅格被占据的概率值来表示环境信息的技术建立环境地图,通过结合环境地图和实时位置以及阴影比对模块分析的数据,用先进路径规划算法规划出最优清扫路径,并将数据上传云平台实现实时分析记录与控制,驱动模块用于按照规划出的最优路径驱动清洁机器人运行并进行清洁工作;人机交互模块能够利用摄像头以及显示屏实现对清洁机器人工作状态和性能的显示,并通过wifi/蓝牙技术可以完成清洁机器人的远程控制,通过电源模块为清洁机器人供电。
12.优选的,具体路径规划步骤如下:s1:打开按钮,连接家庭wifi或手机蓝牙,对清洁机器人进行初始化设定;s2:用户根据需求对清洁机器人进行功能旋转;s3:通过摄像头对实时环境进行搜索充电基站,在电量缺少状态下,选择最短路径移动至充电基站进行回充,电量充足时进行下一步;s4:利用机身设置的激光雷达构建实时环境信息分析反馈,并利用几何
‑
拓扑混合地图或特征地图或栅格地图技术中的一种建立环境地图;s5:利用陀螺仪模块与光电编码器配合获取机器人的加速度和角速度进行二重积分,依据环境地图,对其自身进行定位;s6:确定清洁机器人的实时位置和清洁环境后,结合清洁环境的阴影比对数据,利用先进路径规划算法自动规划出最优清扫路径;s7:清洁机器人按规划出的最优清扫路径运行进行清扫;s8:在清扫过程中,进行路障扫描,遇到障碍时进入避障程序同时把障碍物所在位置信息记录进地图数据中;判断是否打扫完全部可清洁格栅,若清扫完成则结束;否则返回步骤s3。
13.优选的,传感器模块包括转角传感器、速度传感器、碰撞传感器、激光雷达;碰撞传感器用于记录碰撞数据;转角传感器用于对角度的实时测量或监控;速度传感器用于检测机器人运动速度;激光雷达用来检测清洁机器人车体和路况,当随机障碍物出现在激光雷达的检测范围内时,将检测信号发送给esp32wifi、蓝牙双模中央控制单元控制清洁机器人实现躲避。
14.优选的,人机交互模块包括智能设备、摄像头、按钮、显示屏、无线通信单元、通信模块,无线通信单元用于实现智能设备与esp32wifi、蓝牙双模中央控制单元的信息传输;按钮用于供用户选择清扫模式及运动速度;摄像头与esp32双模中央控制单元结合,在手机或者web端远程监测家中情况。
15.有益效果:1、这种无人驾驶清洁机器人设置有清洁布,通过刷辊对清洁布进行清洁,使得清洁的物质落入清扫刷处,清扫刷配合引导轮,使得清理下来的污渍通过导尘管进入集尘室,通过往复转动的清洁布,清洁布移动过程中,弧形锯齿状的清洁布便于将顽固污渍刮附下,并可收入纳灰腔,纳灰腔在经过转轴的过程中开口处呈打开状,便于刷辊对内部进行清洁,清洁布清洁过程中,纳灰腔内可以进水,并通过夹辊挤压将水喷出,可以起到冲刷清洁布的
作用,达到彻底清洁清洁布作用,清洁布自清洁效果佳。
16.2、这种无人驾驶清洁机器人路径规划方法包含阴影比对模块,结合环境地图以及地面实际阴影的数据,形成最优的行驶路径,能够更有效的进行清洁,并提高清洁效率,区分重点清洁区,在重点清洁区加快清洁布旋转清洁,并加速引导轮的旋转,进而控制吸力,在一般环境,则实现普通速度进行控制清洁布与引导轮,针对性强。
17.附图说明:图1为本发明的无人驾驶清洁机器人示意图。
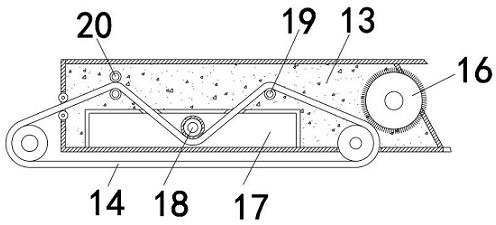
18.图2为本发明的机器人主体剖视示意图。
19.图3为本发明的机器人主体底部示意图。
20.图4为本发明的清洁布连接结构示意图。
21.图5为本发明的清洁布局部结构示意图。
22.图6为本发明的清洁布弯曲部位结构示意图。
23.图7为本发明的无人驾驶清洁机器人路径规划系统示意图。
24.图8为本发明的无人驾驶清洁机器人路径规划系统构造示意图。
25.图1
‑
8中:机器人主体1、集尘室101、控制器2、展板3、起尘刷4、承载板5、进尘口6、清扫刷7、引导轮8、导尘管9、导向板10、排气口11、装灰斗12、分隔板13、清洁布14、纳灰腔141、挡板15、刷辊16、水腔17、清洁辊18、导向辊19、夹辊20。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.参照图1
‑
6,一种无人驾驶清洁机器人,包括机器人主体1,机器人主体1两侧设有一体延伸的展板3,展板3下端转动设置起尘刷4,展板3内部安装有驱动起尘刷4的电机,起尘刷4均由外至内旋转,机器人主体1底部设有进尘口6,进尘口6位于起尘刷4之间的位置,进尘口6处转动设置清扫刷7,清扫刷7为柱状,机器人主体1内部固定有承载板5,承载板5上端设为集尘室101,机器人主体1底部通过两组转轴转动设置清洁布14,清洁布14与地面接触,机器人主体1内部位于清洁布14前后侧固定分隔板13,分隔板13处转动连接转向轮,转向轮下端与地面接触,机器人主体1内设置控制转向轮转向的转向杆和驱动转向杆的步进电机,机器人主体1内部位于清洁布14上端设有水腔17,水腔17位于分隔板13之间的位置,水腔17内设置旋转的清洁辊18,水腔17上端位于清洁辊18一侧转动设置导向辊19,水腔17上端位于清洁辊18另一侧转动设置夹辊20,夹棍20上下设置两组,夹棍20之间间距小于清洁布14的厚度,清洁布14依次从导向辊19上端、清洁辊18下端、夹棍20之间绕过,机器人主体1内部位于清扫刷7上端设有转动的刷辊16,刷辊16与清洁布14外侧表面相接,连接清洁布14的转轴以及刷辊16外侧均连接有旋转设备,可以选择旋转气缸或电机,本实施例选用电机;清洁布14跟随转轴旋转的过程中,清洁布14下端与地面摩擦进行清洁,并实现对地面顽固污渍进行快速有效的清洁,清洁布14在进入机器人主体1内部后首先与刷辊16相接转动,刷辊16与清洁布14相对转动设置,则使得清洁布14上端的垃圾污渍可快速刷下,之后清洁布14进入水腔17内进行清洗,通过清洁辊18与清洁布14外侧进行刷洗,便于自清洁,自清洁的清洁布14经过夹棍20将大部分水夹下,然后再次转动至机器人主体1外侧对地面清洁,
也就是循环清洁,清洁效果佳。
28.其中,清洁布14外侧依次设有纳灰腔141,纳灰腔141内部呈空心球状,清洁布14外侧位于纳灰腔141两侧呈弧形锯齿状,纳灰腔141为橡胶材质;清洁布14移动过程中,弧形锯齿状的清洁布14便于将顽固污渍刮附下,并可收入纳灰腔141,纳灰腔141在经过转轴的过程中开口处呈打开状,便于刷辊16对内部进行清洁,清洁布14清洁过程中,纳灰腔141内可以进水,并通过夹辊20挤压将水喷出,可以起到冲刷清洁布14的作用,达到彻底清洁清洁布14作用,自清洁效果佳。
29.其中,机器人主体1内部位于刷辊16相对一侧转动设置有导向轮8,机器人主体1内部安装有驱动导向轮8旋转的伺服电机,伺服电机的输出轴上端安装蜗轮,蜗轮一侧传动连接转动设置在机器人主体1内部的蜗杆,蜗杆与清扫刷7通过同步轮同步带传动连接,导向轮8外侧设有导尘管9延伸至集尘室101,导尘管9固定安装在机器人主体1内部,集尘室101内设有过滤器以及排气口11,位于导尘管9一侧的集尘室101固定安装有导向板10,过滤器安装在导向板10与排气口11之间,导向板10设有通孔连通过滤器。
30.其中,集尘室101内抽拉卡合装灰斗12;便于将装灰斗12的灰尘处理。
31.其中,机器人主体1顶部设有控制器2,控制器2上端设有无线信号接收天线以及显示屏;便于控制机器人主体1进行清洁打扫。
32.如图7
‑
8,本实施例提供一种无人驾驶清洁机器人路径规划方法,清洁机器人包括控制单元、人机交互模块、传感器模块、驱动模块和电源模块,人机交互模块、传感器模块、驱动模块和电源模块均匀控制单元连接设置,传感器模块用于分析并反馈实时清洁环境信息,清洁机器人还设置有定位模块和阴影比对模块,定位模块用于获取当前清洁机器人在环境地图上所在的位置,阴影比对模块用于比对当前环境清扫的侧重点,控制单元采用esp32wifi、蓝牙双模中央控制单元,用于获取并处理外部环境信息,利用几何
‑
拓扑或对从机器人传感器上采集到的环境信息进行共性筛除、特征提取后,得到简单的几何信息特征或将环境分解成一系列离散的栅格,每个栅格有一个值,栅格包含了坐标、是否障碍两类基本信息,用每一个栅格被占据的概率值来表示环境信息的技术建立环境地图,通过结合环境地图和实时位置以及阴影比对模块分析的数据,用先进路径规划算法规划出最优清扫路径,并将数据上传云平台实现实时分析记录与控制,驱动模块用于按照规划出的最优路径驱动清洁机器人运行并进行清洁工作;人机交互模块能够利用摄像头以及显示屏实现对清洁机器人工作状态和性能的显示,并通过wifi/蓝牙技术可以完成清洁机器人的远程控制,通过电源模块为清洁机器人供电;地面更脏的地方阴影深,结合环境地图以及地面实际阴影的数据,形成最优的行驶路径,这样能够更有效的进行清洁,并提高清洁效率,区分重点清洁区,在重点清洁区加快清洁布旋转清洁,并加速引导轮的旋转,进而控制吸力,在一般环境,则实现普通速度进行控制清洁布与引导轮,针对性强。
33.其中,具体路径规划步骤如下:s1:打开按钮,连接家庭wifi或手机蓝牙,对清洁机器人进行初始化设定;s2:用户根据需求对清洁机器人进行功能旋转;s3:通过摄像头对实时环境进行搜索充电基站,在电量缺少状态下,选择最短路径移动至充电基站进行回充,电量充足时进行下一步;s4:利用机身设置的激光雷达构建实时环境信息分析反馈,并利用几何
‑
拓扑混合
地图或特征地图或栅格地图技术中的一种建立环境地图;s5:利用陀螺仪模块与光电编码器配合获取机器人的加速度和角速度进行二重积分,依据环境地图,对其自身进行定位;轨迹推算公式如下:其中a(x)表示x时刻的加速度,w(x)表示x时刻的角加速度,s表示t时刻的位移,表示t时刻转过角度,这几个量均为矢量,s(0)=0,θ(0)=0。
34.用数值分析的方法,将利用梯形数值积分公式,化简运算公式为其中,an表示加速度,vn表示速度,sn表示位移,wn表示角速度,θn表示转过角度,δt测量时间间隔,参数角标n表示第n个测量点得到的数据,其中an,vn,sn具有水平和竖直分量。
35.航迹推算的过程的每一次推算并不需要对之前所有的加度速度两次数值积分得到位置坐标,上一次的梯形积分得到的速度、位置结果中已经包含之前所有运动历史数据的信息,只需在上一次的速度、位置上进行递推即可。
36.vn=vn
‑
1 0.5an
‑
1 0.5ansn=sn
‑
1 0.5vn
‑
1 0.5vnθn=θn
‑
1 0.5wn
‑
1 0.5wns6:确定清洁机器人的实时位置和清洁环境后,结合清洁环境的阴影比对数据,利用先进路径规划算法自动规划出最优清扫路径;最优清扫路径包括最优清扫路径包括地图已知情况下的单元域规划和地图未知情况下的路径规划;地图已知情况下的单元域规划的输入步骤如下:输入代表地图二值二维数组map=(x,y);按照二维数组特点,坐标原点在左上角,y是高,x是宽,y向下递增,x向右递增;将x和y封装成一个类,进行传参,重写equals方法比较坐标(x,y);map(k)=map(k
‑
1),当x(k)=x(k
‑
1),y(k)=y(k
‑
1),否则map(k)=map(k
‑
2),当x(k)不等于x(k
‑
1)或y(k)不等于y(k
‑
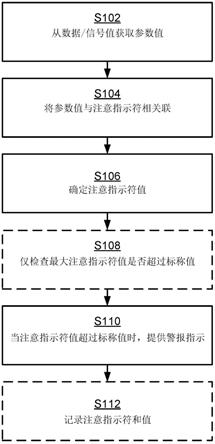
1);封装路径结点类,字段包括:坐标、g值、f值、父结点,实现comparable接口;最后数据结构为a*算法输入的所有数据封装在一起;处理步骤如下:算法中定义几个常量来确定:二维数组中bar=1值表示障碍物、path=2为二维数组中绘制路径的代表值、direct_value=10表示计算g值需要横纵移动代价,direct_value=14表示斜移动代价;使用priorityqueue与arraylist定义open和close辅助表分别取最小值与保存结点;定义布尔类判断方法;计算h值,这里使用“曼哈顿”法,坐标分别取差值相加;从open列表中查找结点;添加邻结点到open表;回溯法绘制路径;开循环移动结点寻找路径,设定循环结束条件,open表为空或者最终结点在close表;s7:清洁机器人按规划出的最优清扫路径运行进行清扫;s8:在清扫过程中,进行路障扫描,遇到障碍时进入避障程序同时把障碍物所在位置信息记录进地图数据中;判断是否打扫完全部可清洁格栅,若清扫完成则结束;否则返回步骤s3。
37.其中,传感器模块包括转角传感器、速度传感器、碰撞传感器、激光雷达;碰撞传感器用于记录碰撞数据;转角传感器用于对角度的实时测量或监控;速度传感器用于检测机器人运动速度;激光雷达用来检测清洁机器人车体和路况,当随机障碍物出现在激光雷达
的检测范围内时,将检测信号发送给esp32wifi、蓝牙双模中央控制单元控制清洁机器人实现躲避。
38.其中,人机交互模块包括智能设备、摄像头、按钮、显示屏、无线通信单元、通信模块,无线通信单元用于实现智能设备与esp32wifi、蓝牙双模中央控制单元的信息传输;按钮用于供用户选择清扫模式及运动速度;摄像头与esp32双模中央控制单元结合,在手机或者web端远程监测家中情况;智能设备包括手机、平板等。
39.其中:电源模块包括供电单元与充电单元,供电单元用于进行供电,充电单元用于对电池模块进行充电。
40.工作原理:通过控制器2控制机器人主体1在最优路径进行清扫,移动过程中起尘刷4将灰尘扫起,通过清扫刷7以及引导轮8的配合将灰尘吸入进尘口6,通过导尘管9导入集尘室12,同时控制清洁布14跟随转轴旋转的过程中,清洁布14下端与地面摩擦进行清洁,并实现对地面顽固污渍进行快速有效的清洁,清洁布14在进入机器人主体1内部后首先与刷辊16相接转动,刷辊16与清洁布14相对转动设置,则使得清洁布14上端的垃圾污渍可快速刷下,刷下的污渍经过清扫刷7以及引导轮8配合进入导尘管9,最后进入集尘室12,之后清洁布14进入水腔17内进行清洗,通过清洁辊18与清洁布14外侧进行刷洗,便于自清洁,自清洁的清洁布14经过夹棍20将大部分水夹下,然后再次转动至机器人主体1外侧对地面清洁,也就是循环清洁,清洁效果佳,清洁布14移动过程中,弧形锯齿状的清洁布14便于将顽固污渍刮附下,并可收入纳灰腔141,纳灰腔141在经过转轴的过程中开口处呈打开状,便于刷辊16对内部进行清洁,清洁布14清洁过程中,纳灰腔141内可以进水,并通过夹辊20挤压将水喷出,可以起到冲刷清洁布14的作用,达到彻底清洁清洁布14作用,清洁布14自清洁效果佳。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。