1.本发明涉及真空吸附技术领域,尤其涉及一种真空吸附装置。
背景技术:
2.一种抓取装置通过抽真空的方式产生抓取力以抓取样品。该抓取装置还用于并将该样品移动至一操作台的目标位置。该样品例如为液晶显示面板中的玻璃基板。但抓取装置在移动样品的过程中,由于自身的伸缩性,会导致样品发生抖动。因此,一方面导致所述样品形变或破损;另一方面还导致样品被移动至目标位置的精度降低。
技术实现要素:
3.本发明一方面提供一种真空吸附装置,包括:
4.至少一个真空产生结构;以及
5.至少一个吸附头;
6.每一吸附头包括:
7.定位块,所述定位块的第一表面上开设有一容置槽,所述容置槽具有远离所述第一表面的底壁,所述定位块中开设有贯孔,所述定位块具有与所述第一表面相对设置的第二表面,所述贯孔一端贯穿所述第二表面,另一端与所述容置槽连通;以及
8.吸嘴,所述吸嘴至少部分容置于所述容置槽,所述吸嘴具有一底部和一侧部,所述底部固定于所述底壁上,所述底壁开设有第一开口,所述第一开口对应所述贯孔设置,所述侧部连接所述底部边缘,所述侧部远离所述定位块一端形成一第二开口,所述第二开口突伸出所述容置槽,所述吸嘴用于吸附工件;
9.每一真空产生结构至少与一贯孔连通,每一真空产生结构用于将其连通的贯孔抽真空或破真空,以使所述吸嘴产生吸附力以吸附所述工件,所述吸嘴吸附有所述工件时,所述工件与所述定位块的所述第一表面抵持。
10.上述真空吸附装置,包括定位块,在定位块上开设容置槽以容纳吸嘴,吸附组件未吸附工件时,吸嘴的第二开口突伸出容置槽,吸附组件吸附工件时,由于工件本身的重力作用,吸嘴向定位块方向收缩,直至工件靠近定位块的表面与定位块上开设容置槽的第一表面相互抵持,一方面有利于使得工件受力均匀,不易发生形变或破损;另一方面有利于使得工件被转移的过程中保持平稳,避免工件随着吸嘴的收缩发生抖动,进而有利于提升转移工件至目标位置的精确度。
附图说明
11.图1为本发明实施例提供的真空吸附装置吸附工件时的平面结构示意图。
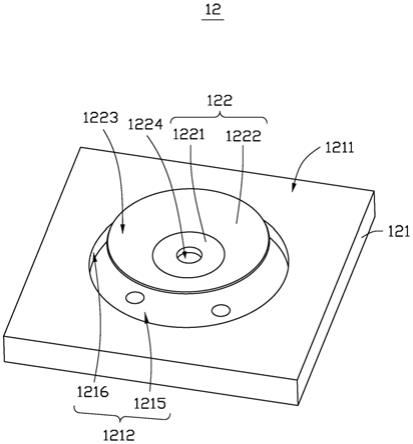
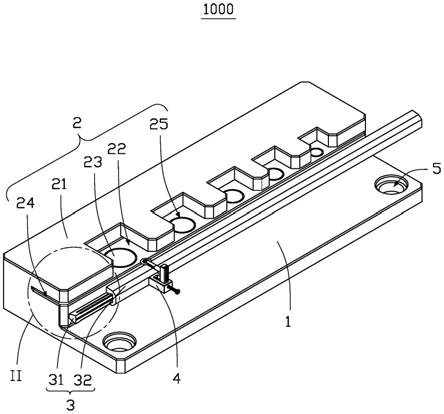
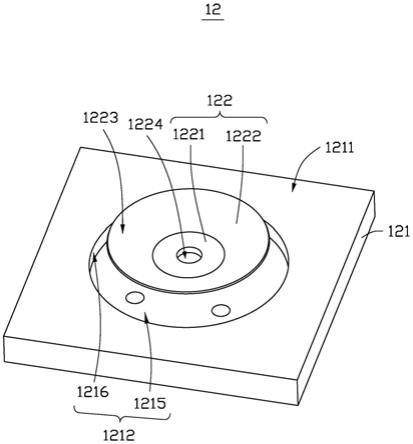
12.图2为图1中真空吸附装置的立体结构的部分示意图。
13.图3为图1沿
ⅱ-ⅱ
线的剖面结构示意图。
14.图4为本发明实施例提供的真空吸附装置未吸附工件时的结构示意图。
15.图5为一对比例中的真空吸附装置吸附工件时的结构示意图。
16.图6为本发明实施例提供的真空吸附装置吸附工件时的结构示意图。
17.主要元件符号说明
18.真空吸附装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10、30
19.转移臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
20.吸附头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、31
21.定位块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
22.第一表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1211
23.容置槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1212
24.底壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1215
25.侧壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1216
26.贯孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1213
27.第二表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1214
28.吸嘴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122、312
29.底部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1221
30.侧部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1222
31.第二开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1223
32.第一开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1224
33.高度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
h1
34.距离
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
h2
35.真空产生结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
36.真空电磁阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
37.连接管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
38.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、40
39.底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
40.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
41.请参阅图1,本实施例提供的真空吸附装置10,用于通过抽真空的方式产生吸附力,借助所述吸附力吸附工件20,并将工件20转移至目标位置。本实施例提供的真空吸附装置10尤其适用于吸附并转移薄板状的工件20,例如用于吸附并转移液晶显示面板中的玻璃基板。所述目标位置例如为一操作台上的预设位置。
42.请继续参阅图1,真空吸附装置10包括至少一个转移臂11。本实施例中,真空吸附装置10包括三个转移臂11。三个转移臂11相互平行且间隔设置。每两个相邻排列的转移臂11等间距设置,有利于提高工件20受力的均匀度,进而有利于避免工件20产生形变或破损。
43.请继续参阅图1,每个转移臂11上固定设置有至少一个吸附头12。本实施例中,每个转移臂11上固定设置有三个吸附头12。每个转移臂11上,每相邻的两个吸附头12之间的间距相等,有利于提高工件20受力的均匀度,进而有利于避免工件20产生形变或破损。
44.于其他实施例中,转移臂11及每个转移臂11上的吸附头12可为其他数量,转移臂
11数量大于等于1即可,每个转移臂11上吸附头12数量大于等于1即可;每个转移臂11上的吸附头12的数量可不同;转移臂11之间的间距、吸附头12之间的间距可不同。于本发明其他实施例中,每个吸附头12可拆卸地设置于一转移臂11上,有利于根据工件20的尺寸选择吸附头12的数量。
45.请继续参阅图1,真空吸附装置10产生吸附力时,所有吸附头12远离转移臂11的一端吸附工件20,三个转移臂11保持相对位置不变,同步位移以将工件20转移至目标位置。转移臂11的位移可通过外接马达(图未示)进行控制。
46.真空吸附装置10中每个吸附头12的结构相同,以下将对其中一吸附头12的结构进行介绍。
47.请参阅图2,吸附头12包括设置于转移臂11上的定位块121和固定设置于定位块121上的吸嘴122。
48.请继续参阅图2,本实施例中定位块121为一四棱柱。可以理解,定位块121的形状不限于四棱柱,于本发明其他实施例中,定位块121可为其他形状,例如为圆柱、五棱柱、圆台等。定位块121远离转移臂11的第一表面1211上开设有容置槽1212。容置槽1212具有底壁1215以及垂直连接于底壁1215边缘的侧壁1216。侧壁1216具有均一的高度。
49.请参阅图3,定义侧壁1216高度(也即容置槽1212的深度)为h1。定位块121内还开设有贯孔1213。贯孔1213一端贯穿定位块121的第二表面1214,另一端贯穿底壁1215从而与容置槽1212连通。其中,第二表面1214与第一表面1211相对设置。
50.吸嘴122由柔性可形变材料形成,所述柔性可形变材料可为硅胶或者橡胶。请继续参阅图3,吸嘴122至少部分位于容置槽1212中。吸嘴122大致呈碗状。吸嘴122具有一固定在底壁1215上的底部1221以及倾斜(非垂直)连接于底部1221的边缘的侧部1222。底部1221为平板状,侧部1222为一弧面。底部1221开设有第一开口1224。第一开口1224对应贯孔1213设置,也即第一开口1224暴露出贯孔1213。底部1221与侧部1222围合构成一具有第二开口1223的中空的结构。第二开口1223位于侧部1222远离定位块121的一端。
51.请一并参阅图2和图3,本实施例中,底部1221的形状为圆形。可以理解的,底部1221的形状不限于圆形,还可以为其他各种形状,例如方形、不规则形状。
52.请再参阅图3,吸嘴122的第二开口1223处用于吸附工件20,被吸附的工件20封住第二开口1223。定义侧部1222远离底部1221的端部与容置槽1212的底壁1215的垂直距离为h2。
53.请参阅图4,吸附头12未吸附工件20时,吸嘴122突伸出容置槽1212,第二开口1223突伸出容置槽1212。也即,h2大于h1。本实施例中,h2-h1=0.1
㎜
。于其他实施例中,h2与h1的高度差值可不同,具体根据工件20的重量、吸嘴122的收缩能力等参数确定。
54.请再参阅图3,吸附头12吸附有工件20时,吸嘴122向定位块121方向收缩,吸嘴122的第二开口1223收缩至与定位块121的第一表面1211高度相等,工件20靠近吸附头12的表面与定位块121的第一表面1211相互抵持。
55.真空吸附装置10具有多个吸附头12,真空吸附装置10吸附有工件20时,每个吸附头12皆吸附工件20,工件20靠近吸附头12的表面与每个吸附头12中定位块121的第一表面1211相互抵持。
56.由于第一表面1211的抵持作用,工件20各处受力均匀性提升,工件20不易产生形
变或损坏。并且,由于每个吸附头12结构相同,则每个定位块121高度相同,工件20靠近吸附头12的表面与每个定位块121的第一表面1211相互抵持时,工件20被固定于各个定位块121的第一表面1211所确定的平面,有利于在转移工件20过程中保持工件20平稳,有利于避免因为吸嘴122的收缩作用而抖动的问题,因此有利于提升转移至上述目标位置的精确度。
57.请继续参阅图3,真空吸附装置10包括至少一个真空产生结构13,本实施例中,真空吸附装置10包括三个真空产生结构13(图3中仅示出了一个)。每一真空产生结构13与位于同一转移臂11上的三个吸附头12中的贯孔1213连通,用于对同一转移臂11上的三个吸附头12中的贯孔1213抽真空或破真空。
58.于其他实施例中,真空吸附装置10可包括其他数量的真空产生结构13,真空产生结构13的数量大于等于1;每个真空产生结构13可连通不同转移臂11上的吸附头12的贯孔1213;每个真空产生结构13可连通的贯孔1213的数量可不同,每个真空产生结构13可连通的贯孔1213的数量大于等于1。
59.真空产生结构13连通多个吸附头12的贯孔1213时,若各个吸附头12距离真空产生结构13的距离不同,各个吸附头12的抽真空或破真空过程所需时间不同,会影响吸附效果,因此实际产品中,每一真空产生结构13所连通的吸附头12中贯孔1213的数量、各吸附头12与真空产生结构13的相对位置需要根据实际的参数计算得到。
60.请继续参阅图3,每一真空产生结构13包括真空电磁阀131和连接管132。每一真空电磁阀131用于连接一真空泵(图未示),控制抽真空或破真空。连接管132一端连接真空电磁阀131,另一端与吸附头12中的贯孔1213连通。吸嘴122上的第二开口1223被工件20封闭时,连接管132、贯孔1213以及吸嘴122的第一开口1224与第二开口1223之间的空间构成一封闭空间。真空电磁阀131抽真空时,可产生一由第二开口1223指向第一开口1224的真空吸附力,从而将工件20固定于吸嘴122。
61.请继续参阅图3和图4,以下对真空吸附装置10的工作过程进行阐述:
62.吸附头12未吸附工件20时,吸嘴122上形成有第二开口1223的一端突伸出容置槽1212。控制工件20逐渐靠近吸附头12的第二开口1223。工件20与吸附头12的第二开口1223的距离小于等于预设值时,控制真空产生结构13开始抽真空。控制工件20与吸嘴122直接接触,且工件20封闭第二开口1223。由于工件20自身的重力作用和真空产生结构13抽真空产生的真空吸附力,吸嘴122产生形变,向定位块121的方向收缩,直至工件20与定位块121的第一表面1211抵持。转移臂11将工件20转移至所述目标位置。控制真空产生结构13破真空,吸嘴122对工件20的吸附力消除,工件20可从吸嘴122上脱离。
63.于其他实施例中,也可在工件20封闭第二开口1223之后再控制真空产生结构13开始抽真空,有利于节省能耗。
64.请参阅图5,一对比例中,真空吸附装置30包括多个吸附头31.每一吸附头31用于吸附工件40。每一吸附头31包括底座311和固定设置于底座311一表面的吸嘴312。底座311上设置吸嘴312的表面为一平面。吸嘴312用于吸附工件40。工件40被多个吸附头31吸附时,工件40仅承载于吸嘴312上,导致工件40与真空吸附装置30的接触面积较小,受力相对集中于直接接触吸嘴312的位置,也即受力不均匀。则,由于工件40自身的重力作用,工件40上位于相邻吸嘴312之间的位置会向多个吸附头31所在一侧发生凹陷,导致工件40发生形变。并且,真空吸附装置30在移动工件40过程中,工件40由于受力不均匀,会发生抖动,一方面进
一步加重形变,另一方面会影响后续的放置位置的精准度。
65.请参阅图6,本实施例提供的真空吸附装置10吸附工件20时,每一吸附头12中定位块121的第一表面1211与工件20靠近吸附头12的表面抵持,有利于提高工件20上各处的受力均匀度,因此有利于保持工件20的形状。由于工件20受力均匀度有效提升,真空吸附装置10移动工件20时,工件20相对平稳,有利于解决抖动的问题。因此,本发明实施例提供的真空吸附装置10,相较于对比例,一方面有利于保持工件20的形状,另一方面有利于提高工件20放置位置的精准度。
66.本实施例提供的真空吸附装置10,包括定位块121,在定位块121上开设容置槽1212以容纳吸嘴122,真空吸附装置10未吸附工件20时,吸嘴122的第二开口1223突伸出容置槽1212,真空吸附装置10吸附工件20时,由于工件20本身的重力作用,吸嘴122向定位块121方向收缩,直至工件20靠近定位块121的表面与定位块121上开设容置槽1212的第一表面1211相互抵持,一方面有利于使得工件20受力均匀,不易发生形变或破损;另一方面有利于使得工件20被转移的过程中保持平稳,避免工件20随着吸嘴122的收缩发生抖动,进而有利于提升转移工件20至上述目标位置的精确度。
67.本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本发明要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。