1.本发明涉及射野影像装置的校正方法,尤其涉及应用于放射治疗或工业无损检测等领域的射野影像装置角度校正方法。
背景技术:
2.射野影像装置接受射线照射生成灰度图像,基于灰度图像可以对辐射源、介质进行重建和分析,已广泛应用于放射治疗剂量监测、放射治疗定位摆位、工业无损检测、医学影像重建等领域。由于重力影响,射野影像装置在不同空间位置时会产生一定的角度偏转,导致生成的灰度图像也存在一定的灰度值偏差,需要对灰度图像进行偏转角度校正,才能够为辐射源、介质重建提供精确的输入信息,因此研究射野影像装置的偏转角度校正方法,对放射治疗监测、工业检测、放射治疗定位摆位、医学影像重建等具有重要意义。
3.目前射野影像装置偏转角度校正一般采用标记点方式,通过使用标记点来获取不同位置处射野影像装置偏转角度校正参数,该方法需要在加速器射野固定位置处粘贴标记点,这样会使得偏转角度校正参数的精度与标记点粘贴精度直接相关,因此受人为干扰作用较大,精度依旧难以控制。
技术实现要素:
4.发明目的:本发明的目的是提供一种精度较高的射野影像装置角度校正方法。
5.技术方案:本发明的精度较高的射野影像装置角度校正方法包括如下步骤:
6.(1)将射线源开一定大小的射野,从不同角度的射野影像装置进行照射,采集形成的灰度图像;
7.(2)对步骤(1)采集的灰度图像进行平滑处理,获得平滑后的灰度图像,根据灰度和注量的标定关系,将灰度图像映射成注量图;
8.(3)根据采集的灰度图像和射野影像装置的参数获取射野内经过灰度图像中心点的沿x和y方向的像素值序列;
9.(4)根据步骤(3)获得的经过灰度图像中心点的沿x和y方向的像素值序列,计算出射野影像装置在x和y方向的偏转角度;
10.(5)应用射野影像装置采集图像时,根据影像装置位置使用步骤(4)得到的偏转角度进行插值,得到各位置的偏转角度并对灰度图像进行偏转角度校正。
11.射野影响装置的参数包括分辨率、像素点物理尺寸和射野影像大小。
12.步骤(4)包括以下步骤:
13.(41)按下式计算x方向上第i个位置采集的灰度图像距离中心点坐标的距离:
14.d
mid,i
=s*i
15.其中s为射野影像装置像素的物理尺寸;
16.(42)依据注量与距离的平方反比关系,计算i个位置点在y方向的偏转角度;
17.(43)按步骤(41)
‑
(42)所述方法计算i个位置点在x方向的偏转角度;
18.(44)计算出在x方向上选取的剩余像素点的θ值并计算其平均值,获得射野影像装置在y方向的偏转角度;
19.(45)计算y方向上选取的剩余像素点的θ值并计算其平均值,获得射野影像装置在x方向的偏转角度。
20.步骤(42)中,i个位置点在y方向的偏转角度按下式计算:
[0021][0022]
其中其中l
i
为源到i点的距离,l
mid
为源到射野影像装置中心的距离,flux
mid
为射野影像装置中心的注量,flux
i
为i点的注量。
[0023]
步骤(5)中所使用的插值方法为线性插值。
[0024]
有益效果:与现有技术相比,本发明具有如下显著优点:不需要添加标记点就能够得到精确的偏转角度校正参数,减少了校正过程的人为干扰,相比传统的标记点方式适用性更强,可对射野影像装置进行高效精确的偏转角度校正,为后续辐射源强重建、定位摆位等提供精确的图像。
附图说明
[0025]
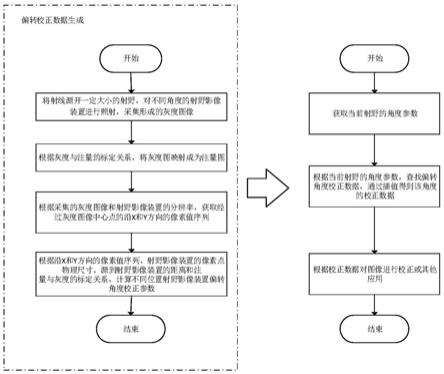
图1为本发明的流程图。
具体实施方式
[0026]
下面结合附图和实施例对本发明的技术方案作进一步说明。
[0027]
如图1所示,本发明的射野影像装置角度校正方法包括如下步骤:
[0028]
(1)将射线源开一定大小的射野,从不同角度的射野影像装置进行照射,采集形成的灰度图像;
[0029]
(2)对步骤(1)采集的灰度图像进行平滑处理,获得平滑后的灰度图像,根据灰度和注量的标定关系,将灰度图像映射成注量图;
[0030]
(3)根据采集的灰度图像和射野影像装置的参数获取射野内经过灰度图像中心点的沿x和y方向的像素值序列;
[0031]
(4)根据步骤(3)获得的经过灰度图像中心点的沿x和y方向的像素值序列,计算出射野影像装置在x和y方向的偏转角度;
[0032]
(5)应用射野影像装置采集图像时,根据影像装置位置使用步骤(4)得到的偏转角度进行插值,得到各位置的偏转角度并对灰度图像进行偏转角度校正。
[0033]
射野影响装置的参数包括分辨率、像素点物理尺寸和射野影像大小。
[0034]
步骤(4)包括以下步骤:
[0035]
(41)按下式计算x方向上第i个位置采集的灰度图像距离中心点坐标的距离:
[0036]
d
mid,i
=s*i
[0037]
其中s为射野影像装置像素的物理尺寸;
[0038]
中心点和第i个位置的灰度分布为g
mid
、g
i
;
[0039]
(42)依据注量与距离的平方反比关系,计算i个位置点在y方向的偏转角度;
[0040]
(43)按步骤(41)
‑
(42)所述方法计算i个位置点在x方向的偏转角度;
[0041]
(44)计算出在x方向上选取的剩余像素点的θ值并计算其平均值,获得射野影像装置在y方向的偏转角度;
[0042]
(45)计算y方向上选取的剩余像素点的θ值并计算其平均值,获得射野影像装置在x方向的偏转角度。
[0043]
步骤(42)中,i个位置点在y方向的偏转角度按下式计算:
[0044][0045]
其中其中l
i
为源到i点的距离,l
mid
为源到射野影像装置中心的距离。
[0046]
本发明的实施例1具体步骤如下:
[0047]
(1)将源到等中心点距离(ssd)设置为100cm,源到射野影像装置的距离(sid)设置成160cm,加速器旋转范围360度,因此将每5度划分为一个角,共形成72个角,加速器开10cm
×
10cm射野照射每个角度,照射强度为50mu,源与射野影像装置之间不放置任何介质,采集射野影像装置上生成的灰度图像。
[0048]
(2)对采集的灰度图像进行平滑处理,获得平滑后的灰度图像,根据申请人的《一种epid灰度
‑
注量标定方法、介质和设备》专利申请(申请号:2021108551341)中的灰度与注量标定方法,将灰度图像映射成为注量图flux
epid
。
[0049]
(3)确认选择灰度图像x方向和y方向两条线段像素点:
[0050]
(31)当前射野大小为10cm2,源到等中心距离为100cm,源到射野影像装置中心距离为160cm,射野影像装置的射野大小由于角度偏转的影响,将射野影像装置的有效射野相对于e
beamsize
内缩2cm,计算得
[0051]
射野影像装置的有效射野e
beamsizev
=14cm;
[0052]
(32)射野影像装置像素的尺寸为0.04cm,选取穿过灰度图像几何中心点的x方向和y方向两条线段上各350的个像素点。
[0053]
(4)射野影像装置角度计算:
[0054]
(41)计算x方向上第i个位置采集的灰度图像距离中心点坐标的距离d
mid,i
=s*i,s为射野影像装置像素的物理尺寸,中心点和第i个位置的灰度分布为g
mid
、g
i
;根据步骤(2)可得对应点的注量flux
mid
、flux
i
,依据注量与距离的平方反比关系,可计算i个位置点在y方向的偏转角度为:
[0055][0056]
其中l
i
为源到i点的距离,l
mid
为源到射野影像装置中心距离;
[0057]
(42)计算出在x方向上选取的剩余像素点的θ值并计算其平均值,可得射野影像装置在y方向的偏转角度。
[0058]
(43)同理计算y方向上选取的剩余像素点的θ值并计算其平均值,可得射野影像装置在x方向的偏转角度。
[0059]
(5)射野影像装置偏转角度校正:
[0060]
应用射野影像装置采集图像时,根据影像装置位置使用步骤(3)得到的偏转角度进行插值,得到当前位置的偏转角度并对灰度图像进行偏转角度校正。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。