1.本技术属于飞机强度试验技术领域,特别涉及一种飞机疲劳试验中飞机内舱结构损伤巡检架构。
背景技术:
2.飞机疲劳试验过程中,损伤和缺陷能否及时发现和确认对新型号飞机试飞、服役的飞行安全至关重要。一般在试验中,需要对飞机内舱表面容易出现表面形变、表面裂纹的部位以及螺栓连接的部位进行状态监测,同时为保证试验安全,还需监测作动器安装螺丝是否松动或脱落、钢丝绳是否断裂(断丝)、连接处的状态等各种常见缺陷。经过分析,试验机结构损伤和缺陷类型主要包括:连接铆钉(或螺栓)断裂/松动或者其它缺陷、结构蒙皮鼓包或者变形、飞机框、梁、接头或蒙皮等结构产生裂纹、机身气密舱漏气等等。
3.当前整机疲劳试验巡检模式是人工目视巡检和人工无损检测设备巡检,此种巡检模式只能在试验停止状态下工作。疲劳试验中飞机结构出现的损伤在停机状态下存在难以检测的问题,因此目前的损伤检测模式会造成试验机结构的损伤漏检或检出不及时的问题。同时为保证试验数据不受干扰,试验机处于测试当中其结构上不能附加其他任何不确定载荷,且为模拟飞机在空中受载状态,飞机内舱为封闭增压状态,此时舱内为高压潮湿环境,这些特点都对试验中飞机结构损伤的高效、精准检测提出了更高的要求。
技术实现要素:
4.为了解决上述问题,本技术提供一种飞机内舱结构损伤巡检架构,针对当前飞机检测存在的多依赖人工、耗时耗力、检测区域限制多且试验运行中无法实时检测等问题,提出基于5g 机器视角的飞机內舱结构损伤巡检系统设计方案,具备关键部位、不可达部位的飞机结构损伤检测功能,为实现整机结构损伤检测的高效、便利和实时提供技术支持。
5.本技术飞机疲劳试验中飞机内舱结构损伤巡检架构,包括轨道系统,所述轨道系统包括内舱巡检滑轨、巡检agv小车及六轴机器人系统,所述内舱巡检滑轨设置在飞机内舱,且自飞机头部向飞机尾部延伸,所述巡检agv小车能够滑动设置在所述内舱巡检滑轨上,所述六轴机器人系统的固定端固定设置在所述巡检agv小车上,所述六轴机器人系统的末端具有相对于所述固定端六个方向的转动自由度;视觉采集系统,设置在所述六轴机器人系统的末端,用于对飞机舱内的待扫描区域的图像进行采集;数据传输系统,连接所述视觉采集系统,用于对所述视觉采集系统采集的图像进行传输;损伤巡检管控系统,用于控制所述巡检agv小车及六轴机器人系统的运动,以及控制所述视觉采集系统进行图像采集,对接收到的图像进行存储、检测和展示。
6.优选的是,所述内舱巡检滑轨设置有两条,每条内舱巡检滑轨分别靠近飞机舱内的一个侧壁,飞机舱内靠近机头及机尾的位置设置有横向移动平台,所述巡检agv小车通过所述横向移动平台在两条内舱巡检滑轨内切换。
7.优选的是,所述内舱巡检滑轨具有与供电系统连接的滑触线,所述滑触线上具有
多个接触点,所述巡检agv小车至少包括两个滑块,每个滑块均能够与所述滑触线连接。
8.优选的是,每条所述内舱巡检滑轨上设置有15个停靠点,通过磁性光栅尺和光电传感器确保巡检小车在到达指定位置时的精度。
9.优选的是,所述横向移动平台上设置有坦克链供电结构,用于保证巡检agv小车在所述横向移动平台上正常供电。
10.优选的是,所述视觉采集系统包括:
11.3d视觉模块,包括结构光相机及高精密激光,用于形成待扫描区域的点云数据;
12.2d视觉模块,包括5.5k高清相机,用于在结构光相机扫描时拍摄扫描区域表面,形成2d图像;
13.监控云台模块,设置有监控云台相机,用于基于用户的远程监控请求启动对舱内特定位置的查看。
14.优选的是,所述数据传输系统还包括图像压缩单元,用于对所述视觉采集系统采集到的高清图片进行压缩。
15.优选的是,所述损伤巡检管控系统包括5g智能终端管控模块,用于确定所述巡检agv小车的停留位置及六轴机器人系统的机械臂运动动作,从而控制所述视觉采集系统采集指定扫描区域的图像。
16.优选的是,所述损伤巡检管控系统包括机器视觉数据库及数据管理模块,用于对视觉采集系统采集到的各类信息的分类存储,并且整合所有采集的机器视觉和仪表类数据。
17.优选的是,所述数据传输系统采用华为5g模组的5g智能工业终端实现5g数据上行和下行的高速传输。
18.本技术提供了一种飞机内舱结构损伤巡检架构,首次提出了满足飞机疲劳试验过程中内舱特殊环境下的基于5g 机器视觉的试验机结构损伤自动化巡检思路,具有检测自动化、无线化和实时化优势;基于5g 机器视觉的巡检系统能够实现飞机疲劳试验中全天候在线损伤检测,可将裂纹、形变等缺陷实时推送到平台以达到巡检轨道范围内全检测的目的,为行业首个航空试验领域结构损伤自动巡检数据运营平台,具有示范效应;轻量化机械臂能够实现试验机内舱结构全覆盖检测,同时精确的导轨定位技术将提升试验巡检精准定位能力;可实现机器人替代人工及人工无法完成的飞机顶部及内舱的日常巡检,提升检测效率和安全。
附图说明
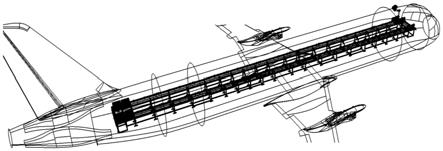
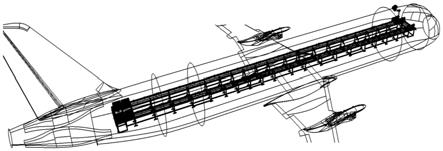
19.图1为本发明提供的一种内舱巡检系统整体示意图;
20.图2为本发明提供的一种飞机巡检系统位置示意图;
21.图3为本发明提供的一种agv小车及视觉巡检模块示意图;
22.图4为本发明提供的一种巡检小车供电双接触系统示意图;
23.图5为本发明提供的5g 机器视觉的试验机结构损伤检测流程图;
24.图6为本发明提供的巡检小车横向轨道切换结构示意图。
具体实施方式
25.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。下面结合附图对本技术的实施方式进行详细说明。
26.本技术在全机疲劳强度试验中提供一种基于5g 机器视觉的內舱巡检系统设计方法,采用5.5k高清像机及结构光相机检测飞机结构损伤和表面裂纹,构建一套试验件內舱巡检系统,为飞机结构损伤检测设备提供自动化、无线化的运输服务,实现飞机全机强度试验中飞机关键部位及不可达部位的结构高效检测的目的,为飞机结构全天候的常规巡检和关键结构的长期定点检测构建基础,主要技术方案如下。
27.本技术提供了一种飞机疲劳试验中飞机内舱结构损伤巡检架构,包括:轨道系统,所述轨道系统包括内舱巡检滑轨、巡检agv小车及六轴机器人系统,如图1及图2所示,所述内舱巡检滑轨设置在飞机内舱,且自飞机头部向飞机尾部延伸,所述巡检agv小车能够滑动设置在所述内舱巡检滑轨上,所述六轴机器人系统的固定端固定设置在所述巡检agv小车上,所述六轴机器人系统的末端具有相对于所述固定端六个方向的转动自由度;视觉采集系统,设置在所述六轴机器人系统的末端,用于对飞机舱内的待扫描区域的图像进行采集;数据传输系统,连接所述视觉采集系统,用于对所述视觉采集系统采集的图像进行传输;损伤巡检管控系统,用于控制所述巡检agv小车及六轴机器人系统的运动,以及控制所述视觉采集系统进行图像采集,对接收到的图像进行存储、检测和展示。
28.本技术的机器视觉系统按照飞机内舱部位空间为检测区域,设置相应的检测站点,基于站点设计各个方位的拍照检测点,每个拍照检测点提供对应的图像、三维点云的检测功能。该巡检方案满足飞机疲劳测试过程中各类缺陷的检测要求,实现在线缺陷检测,并将裂纹、形变等巡检数据通过5g网络传输到数据管理平台,以达到巡检轨道范围内全检测的目的。
29.在一些可选实施方式中,所述内舱巡检滑轨具有与供电系统连接的滑触线,所述滑触线上具有多个接触点,所述巡检agv小车至少包括两个滑块,每个滑块均能够与所述滑触线连接。
30.本技术供电系统属于轨道系统的一部分,用于为所述巡检agv小车在巡检时实现实时供电,供电系统采用基于封闭式结构和阻燃材料的滑触线供电方式,如图4所示,采用24v供电,最大电流约50a(1200w/24v)分8个接触点,在避免巡检小车使用过程中断电的同时,也将供电电流降至最低,降低舱内安全风险。接触点采用双滑块式模式,在移动及轨道切换过程能保证至少一个滑块与滑触线完整接触,杜绝小车在运动过程中出现断电风险,以保证小车工作的稳定性。
31.在一些可选实施方式中,所述内舱巡检滑轨设置有两条,每条内舱巡检滑轨分别靠近飞机舱内的一个侧壁,飞机舱内靠近机头及机尾的位置设置有横向移动平台,所述巡检agv小车通过所述横向移动平台在两条内舱巡检滑轨内切换。巡检小车在飞机内舱两头
切换时,通过伺服系统使平台滑轨与移动平台滑轨精准对接,保证小车能经过滑轨稳定驶入横向移动平台,通过中间滑触线以及小车横向移动平台滑触线双向供电,同时利用双滑块双向接触,使切换供电更加稳定。采用横向移动伺服控制系统,在巡检小车移动到横向移动平台后,通过伺服系统精准移动到另一侧导轨,同时通过坦克链供电保证巡检小车在移动到需切换导轨的过程中始终正常供电。
32.在一些可选实施方式中,每条所述内舱巡检滑轨上设置有15个停靠点,巡检agv小车系统采用双导轨滑动方式,确保小车精准移动到30个拍摄点,实现固定位置扫描,如图3所示。通过磁性光栅尺和光电传感器确保巡检小车在到达指定位置时的精度,轨道系统设计重复精度为0.1mm,用于机器人精准定位后自动扫描和拍摄。导轨加固60米铝板用于双导轨固定,结合现有舱内地轨进行固定,大大减少了施工对舱内静力疲劳测试的影响风险。
33.在一些可选实施方式中,如图6所示,所述横向移动平台上设置有坦克链供电结构,用于保证巡检agv小车在所述横向移动平台上正常供电。
34.在一些可选实施方式中,如图3所示,所述视觉采集系统包括3d视觉模块、2d视觉模块及监控云台模块。
35.3d视觉模块,包括结构光相机及高精密激光,用于形成待扫描区域的点云数据,3d视觉模块通过六轴机器人系统,进行舱内不同区域和不同角度的扫描,采集飞机内舱所有扫描区域的3d点云数据,扫描舱内鼓包、形变、裂纹缺陷。
36.2d视觉模块,包括5.5k高清相机,通过两个5.5k高清相机用于在结构光相机扫描时拍摄扫描区域表面,形成2d图像,用于拍摄内舱表面划伤、裂纹缺陷。
37.监控云台模块,设置有监控云台相机,用于基于用户的远程监控请求启动对舱内特定位置的查看。所述监控云台模块的高清相机用于对缺陷部位的进一步拍摄和查看,便于人员在发现缺陷时,需要进一步远程控制高清监控云台高清相机,通过监控云台高清相机去查看缺陷。
38.在一些可选实施方式中,所述数据传输系统还包括图像压缩单元,用于对所述视觉采集系统采集到的高清图片进行压缩。
39.在一些可选实施方式中,所述损伤巡检管控系统包括5g智能终端管控模块,用于确定所述巡检agv小车的停留位置及六轴机器人系统的机械臂运动动作,从而控制所述视觉采集系统采集指定扫描区域的图像。
40.在一些可选实施方式中,所述损伤巡检管控系统包括机器视觉数据库及数据管理模块,用于对视觉采集系统采集到的各类信息的分类存储,并且整合所有采集的机器视觉和仪表类数据。
41.本实施例中,针对巡检小车和视觉识别系统采集到的各类信息,整合所有采集的机器视觉和仪表类数据,形成各类大数据模型,并通过信息化中心进行集中监测和展示。如图5所示,平台包括内舱识别效果展示及交互、机器视觉数据库及数据管理平台和5g智能终端管控平台等模块,具体而言如下:人机交互,数据管理,与巡检小车之间的交互管理;5.5k高清相机、结构光相机、监控云台高清相机人机交互;机械手式巡检小车检测点动态添加、基于检测点的检测动作动态添加;所有相机的采集数据传输运营平台的人机交互展示。
42.在一些可选实施方式中,所述数据传输系统采用华为5g模组的5g智能工业终端实现5g数据上行和下行的高速传输。本实施例中,所述数据处理传输系统与所述视觉采集系
统连接,用于对所述视觉采集系统拍摄到的数据进行处理并通过5g网络传输至所述损伤巡检管控系统,上行传输速度120mbps,最高可达150mbps。同时带有arm(rk3399)及ai(华为atlas200)运算平台,算力可达16tfps,实现对飞机表面缺陷检测。
43.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。