1.本发明涉及姿态测量技术领域,特别是涉及一种姿态测量系统。
背景技术:
2.姿态测量系统广泛应用于航模、无人机、机器人等需要高动态平衡的机电设备中,以机器人为例,机器人需按照预设轨迹移动,过程中机器人上的姿态测量系统虽然能够得到姿态数据,但是姿态数据的测量的准确度受环境影响,导致姿态数据的测量精确很低。此外,机器人行驶路面的起伏也导致姿态测量的准确性降低,因此,亟需一种提高测量精度的姿态测量系统。
技术实现要素:
3.本发明的目的是提供一种姿态测量系统,能够提高机器人姿态数据的测量精度。
4.为实现上述目的,本发明提供了如下方案:
5.一种姿态测量系统,包括:
6.姿态数据测量模块、环境采集模块、数据处理模块、控制模块和数据传输模块;
7.所述姿态数据测量模块设置于可伸缩支架上;所述姿态数据测量模块与数据处理模块连接;所述姿态数据测量模块用于测量机器人的姿态数据;所述姿态数据包括角速度、磁航向和加速度;
8.所述数据处理模块与所述控制模块连接;所述数据处理模块用于对所述姿态数据进行放大滤波处理,得到所述机器人的放大滤波处理后的姿态数据;
9.所述环境采集模块与所述控制模块连接;所述环境采集模块用于采集所述机器人的外界环境信息并传输至所述控制模块;
10.所述控制模块与所述数据传输模块连接;所述控制模块用于根据所述放大滤波处理后的姿态数据确定所述姿态数据测量模块与上一次测量时的高度偏移量;所述控制模块还用于根据所述高度偏移量调节所述可伸缩支架的高度;
11.所述数据传输模块与远程终端连接,所述数据传输模块用于将所述高度偏移量、所述外界环境信息和放大滤波处理后的姿态数据均传输至所述远程终端。
12.可选的,所述姿态数据测量模块,具体包括:
13.陀螺仪、电子罗盘、加速度计;
14.所述陀螺仪、所述电子罗盘和所述加速度计均与数据处理模块连接;
15.所述陀螺仪用于测量机器人的角速度;
16.所述电子罗盘用于测量所述机器人的磁航向;
17.所述加速度计用于测量所述机器人的加速度。
18.可选的,所述数据处理模块,具体包括:
19.3个放大滤波单元;
20.3个所述放大滤波单元的输入端分别与所述陀螺仪、所述电子罗盘和所述加速度
计连接;3个所述放大滤波单元的输出端均与所述控制模块连接。
21.可选的,所述环境采集模块,具体包括:
22.摄像机和温湿度传感器;
23.所述摄像机和所述温湿度传感器均与所述控制模块连接;
24.所述摄像机用于采集所述机器人外部的视频信息;
25.所述温湿度传感器用于采集所述机器人外部的温度和湿度。
26.可选的,所述环境采集模块,还包括:
27.光照传感器和光源;
28.所述光照传感器和所述光源均与所述控制模块连接;
29.所述光照传感器用于采集所述机器人外部的光照强度;
30.所述控制模块用于在所述机器人外部的光照强度低于第一光照强度阈值时,开启所述光源;在所述机器人外部的光照强度高于第二光照强度阈值时,关闭所述光源;第一光照强度阈值为所述摄像机获取视频所需的最低光照强度;所述第二光照强度阈值大于所述第一光照强度阈值。
31.可选的,所述系统,还包括:
32.存储模块;
33.所述存储模块与所述控制模块连接;所述存储模块用于存储所述放大滤波处理后的姿态数据和所述外界环境信息。
34.可选的,所述系统,还包括:
35.显示模块;
36.所述显示模块与所述控制模块连接;所述显示模块用于显示所述放大滤波处理后的姿态数据和所述外界环境信息。
37.可选的,所述系统,还包括:
38.北斗模块;
39.所述北斗模块与所述控制模块连接;所述北斗模块用于获取所述机器人的位置信息。
40.可选的,所述系统,还包括:
41.电源模块和太阳能板;
42.所述电源模块分别与所述姿态数据测量模块、所述环境采集模块、所述数据处理模块和所述太阳能板连接。
43.根据本发明提供的具体实施例,本发明公开了以下技术效果:
44.本发明提供了一种姿态测量系统,包括:姿态数据测量模块、环境采集模块、数据处理模块、控制模块和数据传输模块;姿态数据测量模块设置于可伸缩支架上;姿态数据测量模块与数据处理模块连接;姿态数据测量模块用于测量机器人的姿态数据;姿态数据包括角速度、磁航向和加速度;数据处理模块与控制模块连接;数据处理模块用于对姿态数据进行放大滤波处理,得到机器人的放大滤波处理后的姿态数据;环境采集模块与控制模块连接;环境采集模块用于采集机器人的外界环境信息并传输至控制模块;控制模块与数据传输模块连接;控制模块用于根据放大滤波处理后的姿态数据确定姿态数据测量模块与上一次测量时的高度偏移量;控制模块还用于根据高度偏移量调节可伸缩支架的高度;数据
传输模块与远程终端连接,数据传输模块用于将高度偏移量、外界环境信息和放大滤波处理后的姿态数据均传输至远程终端。本发明姿态数据确定姿态数据测量模块与上一次测量的高度偏移量并可伸缩支架的高度,提高了对机器人的姿态数据的测量精度。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
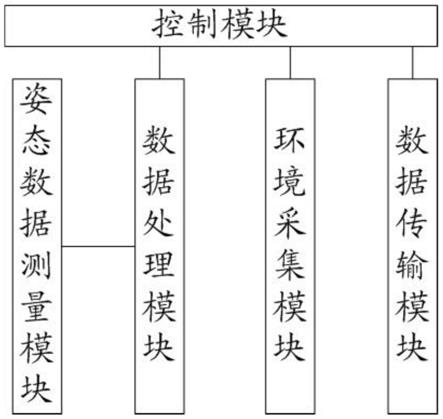
46.图1为本发明实施例中姿态测量系统的结构示意图。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.本发明的目的是提供一种姿态测量系统,能够提高机器人姿态数据的测量精度。
49.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
50.图1为本发明实施例中姿态测量系统的结构示意图,如图所示,本发明提供了一种姿态测量系统,包括:
51.姿态数据测量模块、环境采集模块、数据处理模块、控制模块和数据传输模块;
52.姿态数据测量模块设置于可伸缩支架上;姿态数据测量模块与数据处理模块连接;姿态数据测量模块用于测量机器人的姿态数据;姿态数据包括角速度、磁航向和加速度;
53.数据处理模块与控制模块连接;数据处理模块用于对姿态数据进行放大滤波处理,得到机器人的放大滤波处理后的姿态数据;
54.环境采集模块与控制模块连接;环境采集模块用于采集机器人的外界环境信息并传输至控制模块;
55.控制模块与数据传输模块连接;控制模块用于根据放大滤波处理后的姿态数据确定姿态数据测量模块与上一次测量时的高度偏移量;控制模块还用于根据高度偏移量调节可伸缩支架的高度;
56.数据传输模块与远程终端连接,数据传输模块用于将高度偏移量、外界环境信息和放大滤波处理后的姿态数据均传输至远程终端。
57.其中,姿态数据测量模块,具体包括:
58.陀螺仪、电子罗盘、加速度计;
59.陀螺仪、电子罗盘和加速度计均与数据处理模块连接;
60.陀螺仪用于测量机器人的角速度;
61.电子罗盘用于测量机器人的磁航向;
62.加速度计用于测量机器人的加速度。
63.数据处理模块,具体包括:
64.3个放大滤波单元;
65.3个放大滤波单元的输入端分别与陀螺仪、电子罗盘和加速度计连接;3个放大滤波单元的输出端均与控制模块连接。
66.环境采集模块,具体包括:
67.摄像机和温湿度传感器;
68.摄像机和温湿度传感器均与控制模块连接;
69.摄像机用于采集机器人外部的视频信息;
70.温湿度传感器用于采集机器人外部的温度和湿度。
71.环境采集模块,还包括:
72.光照传感器和光源;
73.光照传感器和光源均与控制模块连接;
74.光照传感器用于采集机器人外部的光照强度;
75.控制模块用于在机器人外部的光照强度低于第一光照强度阈值时,开启光源;在机器人外部的光照强度高于第二光照强度阈值时,关闭光源;第一光照强度阈值为摄像机获取视频所需的最低光照强度;第二光照强度阈值大于第一光照强度阈值。
76.此外,本发明提供的姿态测量系统,还包括:
77.存储模块;
78.存储模块与控制模块连接;存储模块用于存储放大滤波处理后的姿态数据和外界环境信息。
79.本发明提供的姿态测量系统,还包括:
80.显示模块;
81.显示模块与控制模块连接;显示模块用于显示放大滤波处理后的姿态数据和外界环境信息。
82.本发明提供的姿态测量系统,还包括:
83.北斗模块;
84.北斗模块与控制模块连接;北斗模块用于获取机器人的位置信息。
85.本发明提供的姿态测量系统,还包括:
86.电源模块和太阳能板;
87.电源模块分别与姿态数据测量模块、环境采集模块、数据处理模块和太阳能板连接。
88.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

