电子装置
1.相关申请的交叉引用
2.本技术要求于2020年5月29日在韩国知识产权局提交的第10
‑
2020
‑
0065027号韩国专利申请的优先权和权益,上述韩国专利申请的全部内容通过引用全部并入本文。
技术领域
3.本公开的实施例涉及具有改善的感测可靠性的电子装置。
背景技术:
4.正在开发诸如智能电话、平板电脑、膝上型计算机和智能电视机之类的电子装置。这样的电子装置可以包括用于向用户提供信息的显示装置。
5.近来,除了显示图像的显示面板之外,电子装置还可以包括被提供用于与用户进行交互的输入传感器。输入传感器被配置为监视屏幕和对象(例如,用户的手指或感测笔)之间是否存在当对象与屏幕接触或向屏幕移动时发生的触摸事件,并且查找此类触摸事件的坐标。在某些情况下,基于触摸事件的坐标将图像信号输入到电子装置。
技术实现要素:
6.公开的一些实施例提供了具有改善的感测可靠性的电子装置。
7.根据本公开的一些实施例,一种电子装置可以包括:显示面板;以及输入传感器,在所述输入传感器中限定了第一区域、包围所述第一区域的第二区域和包围所述第二区域的第三区域,所述输入传感器位于所述显示面板上并且包括感测电极,所述感测电极包括:第一电极,包括第一主电极和第一子电极;以及第二电极,相邻于所述第一电极,并且包括第二主电极以及在所述第一区域中位于所述第一主电极和所述第一子电极之间的第二子电极。
8.在平面图中,所述第一子电极和所述第二子电极可以在所述第二区域中彼此交叉。
9.所述显示面板可以包括有源区域和相邻于所述有源区域的外围区域,其中,所述第一区域和所述第二区域与所述有源区域交叠,并且其中,所述第三区域与所述外围区域交叠。
10.所述显示面板可以包括有源区域和外围区域,所述有源区域和所述外围区域在所述显示面板中限定为彼此相邻,其中,所述第一区域与所述有源区域交叠,并且其中,所述第二区域和所述第三区域与所述外围区域交叠。
11.所述输入传感器还可以包括位于所述第三区域中的感测线,所述感测线分别电连接到所述感测电极,并且所述感测线包括:电连接到所述第一主电极和所述第一子电极的第一线、以及电连接到所述第二主电极和所述第二子电极的第二线。
12.所述多个感测电极还可以包括彼此相邻的第三电极和第四电极;其中,所述第一电极和所述第二电极在第一方向上延伸;其中,所述第三电极和所述第四电极在与所述第
一方向交叉的第二方向上延伸;其中,所述第三电极包括第三主电极和第三子电极;其中,所述第四电极包括第四主电极和第四子电极;并且其中,在所述第一区域中,所述第四子电极位于所述第三主电极和所述第三子电极之间。
13.所述第一主电极的宽度可以大于所述第一子电极的宽度。
14.所述第一子电极可以包括彼此间隔开的多个第一子电极,且所述第一主电极位于所述多个第一子电极之间。
15.所述第一电极还可以包括第一辅助电极,所述第一辅助电极与所述第一主电极间隔开,且所述第一子电极位于所述第一辅助电极和所述第一主电极之间;其中,所述第二电极还包括第二辅助电极,所述第二辅助电极与所述第二主电极间隔开,且所述第二子电极位于所述第二辅助电极和所述第二主电极之间;其中,在所述第一区域中,所述第一子电极和所述第一辅助电极位于所述第二主电极和所述第二子电极之间;并且其中,在平面图中,所述第一辅助电极和所述第二辅助电极在所述第二区域中彼此交叉。
16.所述第一电极还可以包括位于所述第一区域中的至少一个连接图案,所述至少一个连接图案将所述第一主电极连接到所述第一子电极并且在平面图中与所述第二子电极交叉。
附图说明
17.根据结合附图所做的以下简要描述,将更清楚地理解实施例。附图表示如本文描述的非限制性的实施例。
18.图1是示出了根据本公开的一些实施例的电子装置的透视图。
19.图2a和图2b是示出了根据本公开的一些实施例的电子装置的截面图。
20.图3是示出了根据本公开的一些实施例的显示面板的平面图。
21.图4是示意性地示出了根据本公开的一些实施例的输入传感器的平面图。
22.图5是沿着图4的线i
‑
i'截取的截面图。
23.图6a是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分。
24.图6b是显示出根据本公开的一些实施例的接收第一信号的输入传感器的信号的曲线图。
25.图6c是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分。
26.图7a是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分。
27.图7b是显示出根据本公开的一些实施例的接收第一信号的输入传感器的信号的曲线图。
28.图8a是示出了根据本公开的一些实施例的电子装置的一部分的透视图。
29.图8b是示出了根据本公开的一些实施例的电子装置的区域aa的放大图。
30.图9是示出了根据本公开的一些实施例的输入传感器的平面图。
31.图10是示出了根据本公开的一些实施例的输入传感器的平面图。
32.应当注意,这些附图旨在示出在一些实施例中利用的方法、结构和/或材料的一般
特性,并且补充下面提供的书面描述。然而,这些附图不是按比例绘制的,并且可能未精确地反映任何给定的实施例的精确结构或性能特征,并且不应被解释为定义或限制实施例所涵盖的值或性质的范围。例如,为了清楚起见,可以减小或夸大分子、层、区域和/或结构元件的相对厚度和位置。在各个附图中使用相似或相同的附图标记旨在指示存在相似或相同的元件或特征。
具体实施方式
33.通过参考实施例的详细描述以及附图,可以更容易地理解本公开的一些实施例的方面及其实现方法。在下文中,将参照附图更详细地描述实施例。然而,所描述的实施例可以以各种不同的形式来实施,并且不应该被解释为仅局限于这里示出的实施例。而是,提供这些实施例作为示例以使本公开将是彻底的和完全的,并将向本领域技术人员充分地传达本公开的方面。因此,可能未描述对于本领域普通技术人员充分理解本公开的方面而言不必要的工艺、元件和技术。
34.除非另外指出,否则同样的附图标记、字符或其组合在整个附图和书面描述中指示同样的元件,并且因此,将不重复其描述。此外,为了使描述清楚,可能未示出与实施例的描述无关的部分。在附图中,为了清楚起见,可能夸大了元件、层和区域的相对尺寸。另外,通常提供在附图中使用交叉影线和/或阴影来阐明相邻元件之间的边界。这样,除非另有说明,否则交叉影线或阴影的存在与否都不传达或表示对元件的特定材料、材料性质、尺寸、比例、示出的元件之间的共性、和/或任何其他特性、属性、性质等的任何偏好或要求。
35.这里参照作为实施例和/或中间结构的示意图的截面图来描述各种实施例。这样,预计这些示图的形状由于例如制造技术和/或公差而发生变化。此外,这里公开的特定结构或功能描述仅仅是说明性的,目的是为了描述根据本公开的构思的实施例。因此,这里公开的实施例不应该被理解为局限于区域的特定示出的形状,而是要包括例如由制造导致的形状偏差。
36.例如,示出为矩形的注入区域在其边缘通常具有圆角或曲线的特征和/或注入浓度的梯度,而不是从注入区域到非注入区域的二元变化。同样地,通过注入形成的埋区可导致在埋区和发生注入所通过的表面之间的区域中出现一定注入。因此,在图中示出的区域实际上是示意性的,它们的形状并不意图示出装置的区域的实际形状,也不意图是限制性的。另外,如本领域技术人员将认识到,在都不脱离本公开的精神或范围的情况下,所描述的实施例可以以各种不同的方式进行修改。
37.在详细描述中,出于解释的目的,阐述了许多具体细节以提供对各种实施例的透彻理解。然而,显而易见的是,可以在没有这些具体细节的情况下或者利用一个或多个等同布置来实践各种实施例。在其他情况下,以框图形式示出了公知的结构和装置,以避免不必要地模糊各种实施例。
38.将理解的是,尽管在这里可使用术语“第一”、“第二”、“第三”等来描述不同的元件、组件、区域、层和/或部分,但是这些元件、组件、区域、层和/或部分不应受这些术语的限制。这些术语仅是用来将一个元件、组件、区域、层或部分与另一个元件、组件、区域、层或部分区分开。因此,在不脱离本公开的精神和范围的情况下,下面描述的第一元件、组件、区域、层或部分可被命名为第二元件、组件、区域、层或部分。
39.为了便于说明,在这里可使用空间相对术语,如“在
…
下面”、“在
…
下方”、“下”、“在
…
之下”、“在
…
上方”和“上”等来描述如图中所示的一个元件或特征与其他(多个)元件或(多个)特征的关系。将理解的是,除了在附图中描绘的方位之外,空间相对术语还意在涵盖装置在使用或操作中的不同方位。例如,如果在附图中装置被翻转,则描述为在其他元件或特征“下方”或“下面”或“之下”的元件随后将被定向为“在”其他元件或特征“上方”。因此,示例术语“在
…
下方”和“在
…
之下”可涵盖“在
…
上方”和“在
…
下方”两种方位。装置可被另外定位(例如,旋转90度或者在其他方位),并应当相应地解释这里使用的空间相对术语。类似地,当第一部件被描述为布置在第二部件“上”时,这表示第一部件布置在第二部件的上侧或下侧,而不限于基于重力方向的其上侧。
40.此外,在本说明书中,短语“在平面上”或“平面图”是指从上方观察目标部分,而短语“在截面上”是指通过从侧面垂直切割目标部分而形成的截面。
41.将理解的是,当元件、层、区域或组件被称作“形成在”另一元件、层、区域或组件“上”,“在”另一元件、层、区域或组件“上”,“连接到”或“结合到”另一元件、层、区域或组件时,该元件、层、区域或组件可以直接形成在另一元件、层、区域或组件上,直接在另一元件、层、区域或组件上,直接连接到或直接结合到另一元件、层、区域或组件,或者间接形成在另一元件、层、区域或组件上,间接在另一元件、层、区域或组件上,间接连接到或间接结合到另一元件、层、区域或组件,从而可以存在一个或多个居间元件、层、区域或组件。例如,当元件、层、区域或组件被称作“电连接”或“电结合”到另一元件、层、区域或组件时,该元件、层、区域或组件可以直接电连接或结合到另一元件、层、区域和/或组件,或者可以存在居间元件、层、区域或组件。然而,“直接连接/直接结合”是指一个组件直接连接或结合另一组件而不存在居间组件。同时,可以类似地解释描述组件之间的关系的其他表述,诸如“在
…
之间”、“直接在
…
之间”或者“与
…
相邻/相邻于”和“与
…
直接相邻/直接相邻于”。另外,还将理解的是,当元件或层被称作“在”两个元件或层“之间”时,该元件或层可以是这两个元件或层之间的唯一元件或层,或者也可以存在一个或多个居间元件或层。
42.在示例中,x轴、y轴和/或z轴不限于直角坐标系的三个轴,并且可以以更宽广的含义来解释。例如,x轴、y轴和z轴可以彼此垂直,或者可以表示彼此不垂直的不同方向。同样适用于第一方向dr1、第二方向dr2和/或第三方向dr3。
43.这里使用的术语仅是为了描述特定实施例的目的,而不意图限制本公开。如这里所使用的,除非上下文另外明确指出,否则单数形式的“一个”和“一种”也意图包括复数形式。还将理解的是,当在本说明书中使用术语“包括(comprises/comprising)”、“具有(have/having)”和“包含(includes/including)”时,说明存在列举的特征、整数、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。
44.如这里所使用的,术语“基本上”、“大约”、“近似”和类似术语用作为近似的术语而不是程度的术语,并且旨在解释本领域普通技术人员将认识到的测量值或计算值的固有偏差。考虑到讨论中的测量和与特定量的测量相关的误差(即,测量系统的限制),如这里所使用的“大约”或“近似”包括列举的值,并且意指在如本领域普通技术人员确定的用于特定值的可接受的偏差范围内。例如,“大约”可以指在一个或多个标准偏差内,或者在列举的值的
±
30%、
±
20%、
±
10%、
±
5%内。此外,当描述本公开的实施例时使用“可以”是指“本公开
的一个或多个实施例”。
45.另外,这里公开和/或列举的任何数值范围旨在包括列举的范围内包含的相同数值精度的所有子范围。例如,“1.0至10.0”的范围旨在包括列举的最小值1.0和列举的最大值10.0之间(并且包括端点值)的所有子范围,即,具有等于或大于1.0的最小值和等于或小于10.0的最大值,例如,2.4至7.6。这里列举的任何最大数值限制旨在包括其中包含的所有较小的数值限制,并且本说明书中提及的任何最小数值限制旨在包括其中包含的所有较大的数值限制。因此,申请人保留修改本说明书(包括权利要求)的权利,以明确地列举包含在这里明确列举的范围内的任何子范围。
46.根据这里描述的本公开的实施例的电子或电气装置和/或任何其他相关装置或组件可以利用任何合适的硬件、固件(例如,专用集成电路)、软件或者软件、固件和硬件的组合来实现。例如,这些装置的各种组件可以形成在一个集成电路(ic)芯片上或形成在单独的ic芯片上。此外,这些装置的各种组件可以在柔性印刷电路膜、带载封装(tcp)、印刷电路板(pcb)上实现,或者形成在一个基板上。
47.此外,这些装置的各种组件可以是在一个或多个计算装置中,在一个或多个处理器上运行,执行计算机程序指令并与其他系统组件交互以执行这里描述的各种功能的进程或线程。计算机程序指令存储在存储器中,该存储器可以使用标准存储装置(诸如,例如,随机存取存储器(ram))在计算装置中实现。计算机程序指令还可以存储在其他非暂时性计算机可读介质(诸如,例如,cd
‑
rom或闪存驱动器等)中。另外,本领域技术人员应该认识到,在不脱离本公开的实施例的精神和范围的情况下,各种计算装置的功能可以组合或集成到单个计算装置中,或者特定计算装置的功能可以分布在一个或多个其他计算装置上。
48.除非另有定义,否则这里使用的所有术语(包括技术术语和科学术语)具有与本公开所属领域的普通技术人员所通常理解的意思相同的意思。将进一步理解,除非这里如此明确定义,否则术语(例如在通用的字典中定义的术语)应该被解释为具有与它们在相关领域和/或本说明书的上下文中的意思一致的意思,并且不应解释为理想的或过于形式化的意思。
49.图1是示出了根据本公开的一些实施例的电子装置的透视图。
50.参照图1,电子装置ea可以被施加至此的电信号激活。电子装置ea可以以各种形式实现。例如,电子装置ea可以用于大型电子装置(例如,电视机、监视器和户外广告牌)或中小型电子装置(例如,个人计算机、膝上型计算机、个人数字助理、汽车导航系统、游戏机、便携式电子装置、智能电话和相机)。然而,这些仅仅是本公开的示例,并且可以使用其他电子装置来实现本公开,只要它们不脱离本公开即可。为了简单起见,随后的描述将参考电子装置ea为智能电话的示例。
51.电子装置ea可以包括用于显示图像im的显示表面ea
‑
is。显示表面ea
‑
is可以包括彼此相邻的有源区域ea
‑
aa和外围区域ea
‑
naa。有源区域ea
‑
aa可以是其上显示图像im的区域。外围区域ea
‑
naa可以不用于显示图像im。图像im可以为视频图像或静止图像。图1示出了作为图像im的示例的时钟和图标。
52.有源区域ea
‑
aa可以平行于由彼此交叉的第一方向dr1和第二方向dr2限定的表面。与有源区域ea
‑
aa正交的方向(例如,电子装置ea的厚度方向)将被称为第三方向dr3。
53.在下文中,每个元件或单元的前表面或顶表面和后表面或底表面基于第三方向
dr3来区分。第三方向dr3可以是与第一方向dr1和第二方向dr2二者交叉的方向。例如,第一方向dr1、第二方向dr2和第三方向dr3可以彼此垂直。在本说明书中,由第一方向dr1和第二方向dr2限定的表面可以被称为“平面”,并且“当在平面图中观察时”的表述可以指在第三方向dr3上观看这里将描述的对象。
54.电子装置ea可以基于主动笔pn的运动来对感测坐标进行感测。主动笔pn可以包括主体部分bd和位于主体部分bd的端部处的感测部分dt。主体部分bd可以包括电源部分。感测部分dt可以对应于传统的笔尖。感测部分dt可以由导电材料形成,或者可以包括导电材料。感测部分dt可以通过使用从电源部分供应的电力在感测部分dt和相邻的导电对象之间产生电场。主动笔pn可以包括主动式静电(aes)笔。后文将更详细地描述主动笔pn。
55.图2a是示出了根据本公开的一些实施例的电子装置的截面图。
56.参照图2a,电子装置ea可以包括显示面板dp、输入传感器is和抗反射层pol。
57.显示面板dp可以包括第一基体层bs1、显示电路层dp
‑
cl、图像显示层dp
‑
oled和薄膜封装层tfe。
58.第一基体层bs1可以是或可以包括硅基板、塑料基板、玻璃基板、绝缘膜或具有多个绝缘层的堆叠件。
59.显示电路层dp
‑
cl可以位于第一基体层bs1上。显示电路层dp
‑
cl可以包括多个绝缘层、多个导电层和至少一个半导体层。显示电路层dp
‑
cl的导电层可以构成信号线或像素控制电路。
60.图像显示层dp
‑
oled可以位于显示电路层dp
‑
cl上。图像显示层dp
‑
oled可以为发光型显示层,但是本公开不限于此示例。例如,图像显示层dp
‑
oled可以为有机发光显示层、量子点显示层、纳米led显示层或微型led显示层。有机发光显示层可以由有机发光材料形成,或者可以包括有机发光材料。量子点显示层可以由电子点或量子棒等形成,或者可以包括电子点或量子棒等。纳米led显示层和微型led显示层可以包括几百微米或更小的小型led器件。为了简单起见,随后的描述将参考其中图像显示层dp
‑
oled为有机发光显示层的示例。
61.薄膜封装层tfe可以位于图像显示层dp
‑
oled上,以覆盖图像显示层dp
‑
oled。薄膜封装层tfe可以包括在第三方向dr3上顺序地堆叠的第一无机层、有机层和第二无机层。然而,本公开不限于薄膜封装层tfe的此结构。例如,在一些实施例中,薄膜封装层tfe还可以包括多个无机层和多个有机层。
62.第一无机层可以减少或防止外部湿气或氧渗透到图像显示层dp
‑
oled中。例如,第一无机层可以由氮化硅、氧化硅和其化合物中的至少一种形成,或者可以包括氮化硅、氧化硅和其化合物中的至少一种。
63.有机层可以位于第一无机层上,并且可以具有平坦的顶表面。形成在第一无机层的顶表面上的不平坦结构或颗粒可以被有机层覆盖。有机层可以由例如丙烯酸类有机材料中的至少一种形成,或者可以包括例如丙烯酸类有机材料中的至少一种,但是本公开不限于此示例。
64.第二无机层可以位于有机层上,以覆盖有机层。第二无机层可以封装或密封有机层,并且因此,可以减少或防止有机层中的湿气泄漏到外部。第二无机层可以由氮化硅、氧化硅和其化合物中的至少一种形成,或者可以包括氮化硅、氧化硅和其化合物中的至少一
种。
65.输入传感器is可以以连续的方式形成在显示面板dp上。在这种情况下,输入传感器is可以直接位于显示面板dp上,这意味着没有其他元件位于输入传感器is和显示面板dp之间。例如,在输入传感器is和显示面板dp之间不存在粘附构件。然而,本公开不限于此示例,并且在一些实施例中,输入传感器is可以通过另外的粘附构件结合到显示面板dp。
66.输入传感器is可以包括基体绝缘层is
‑
il0和感测电路层ml
‑
t。
67.基体绝缘层is
‑
il0可以位于薄膜封装层tfe上。基体绝缘层is
‑
il0可以由无机材料、有机材料和复合材料中的至少一种形成,或者可以包括无机材料、有机材料和复合材料中的至少一种。基体绝缘层is
‑
il0可以直接位于薄膜封装层tfe上。例如,基体绝缘层is
‑
il0可以与薄膜封装层tfe直接接触。基体绝缘层is
‑
il0可以具有单层或多层结构。在一些实施例中,可以省略基体绝缘层is
‑
il0。
68.感测电路层ml
‑
t可以位于基体绝缘层is
‑
il0上。感测电路层ml
‑
t可以包括多个绝缘层和多个导电层。导电层可以包括用于感测外部输入的多个感测电极和分别电连接到感测电极的多条感测线,如下面将更详细地描述的。
69.抗反射层pol可以位于输入传感器is上。抗反射层pol可以包括偏振层。抗反射层pol可以包括偏振器和相位延迟器。偏振器和相位延迟器可以是伸长型合成树脂膜或涂覆型合成树脂膜。例如,抗反射层pol可以通过用碘化合物对聚乙烯醇(pva)膜进行染色来提供。抗反射层pol可以被配置为减小从外部入射的外部光的光学反射率。
70.在一些实施例中,抗反射层pol可以包括滤色器。在一些实施例中,滤色器可以以具体或特定的方式布置。可以考虑要从图像显示层dp
‑
oled中的像素发射的光的颜色来确定滤色器的布置。
71.在一些实施例中,抗反射层pol可以包括相消干涉结构。例如,相消干涉结构可以包括位于不同层的第一反射层和第二反射层。分别被第一反射层和第二反射层反射的第一反射光和第二反射光可以彼此相消干涉,并且因此,可以减小外部光的反射率。
72.图2b是示出了根据本公开的一些实施例的电子装置的截面图。在图2b的以下描述中,为了简洁起见,参照图2a描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
73.参照图2b,电子装置ea
‑
1可以包括显示面板dp
‑
1、输入传感器is
‑
1和抗反射层pol。
74.显示面板dp
‑
1可以包括第一基体层bs1、显示电路层dp
‑
cl和图像显示层dp
‑
oled。
75.输入传感器is
‑
1可以位于显示面板dp
‑
1上。输入传感器is
‑
1可以包括第二基体层bs2和感测电路层ml
‑
t。
76.第二基体层bs2可以是或可以包括硅基板、塑料基板、玻璃基板、绝缘膜或具有多个绝缘层的堆叠件。
77.结合构件slm可以位于第一基体层bs1和第二基体层bs2之间。结合构件slm可以与第一基体层bs1和第二基体层bs2组合。结合构件slm可以由有机材料(例如,光固化或光塑性树脂)和无机材料(例如,玻璃料密封剂)中的至少一种形成,或者可以包括有机材料(例如,光固化或光塑料树脂)和无机材料(例如,玻璃料密封剂)中的至少一种,但是本公开不限于这些示例或特定实施例。
78.图3是示出了根据本公开的一些实施例的显示面板的平面图。
79.参照图3,可以在显示面板dp中限定彼此相邻的有源区域dp
‑
aa和外围区域dp
‑
naa。有源区域dp
‑
aa可以是用于显示图像im(例如,参见图1)的区域。多个像素px可以位于有源区域dp
‑
aa中。有源区域dp
‑
aa可以对应于电子装置ea的有源区域ea
‑
aa(例如,参见图1)。外围区域dp
‑
naa可以是驱动电路或驱动线所在的区域。外围区域dp
‑
naa可以对应于电子装置ea的外围区域ea
‑
naa(例如,参见图1)。
80.每个像素px可以被配置为显示原色之一或混合色之一。原色可以包括红色、绿色和蓝色。混合色可以包括诸如白色、黄色、青色和品红色的各种颜色。然而,通过像素px可以显示的颜色不限于以上颜色。
81.显示面板dp可以包括基体层bs1、多个像素px、多条信号线gl、dl、pl和el、多个显示焊盘pdd以及多个感测焊盘pdt。
82.信号线gl、dl、pl和el可以位于基体层bs1上。基体层bs1可以是图2a的第一基体层bs1。信号线gl、dl、pl和el可以连接到像素px,以将电信号传递到像素px。信号线gl、dl、pl和el可以包括多条扫描线gl、多条数据线dl、多条电力线pl和多条发光控制线el。然而,本公开不限于信号线gl、dl、pl和el的所描述的结构。例如,信号线gl、dl、pl和el还可以包括至少一条初始化电压线。
83.电力图案vdd可以位于外围区域dp
‑
naa中。电力图案vdd可以结合到电力线pl。因为显示面板dp包括电力图案vdd,所以可以向像素px提供相同的电力信号。
84.显示焊盘pdd可以位于外围区域dp
‑
naa中。显示焊盘pdd可以包括第一焊盘pd1和第二焊盘pd2。在一些实施例中,可以提供多个第一焊盘pd1。第一焊盘pd1可以分别电连接到数据线dl。第二焊盘pd2可以通过电力图案vdd电连接到电力线pl。显示面板dp可以经由显示焊盘pdd将从外部提供的电信号提供到像素px。在一些实施例中,除了第一焊盘pd1和第二焊盘pd2之外,显示焊盘pdd还可以包括用于接收其他电信号的焊盘,但是本公开不限于此示例或任何特定实施例。
85.驱动芯片ic可以安装在外围区域dp
‑
naa上。驱动芯片ic可以是以芯片的形式提供的时序控制电路。数据线dl可以通过驱动芯片ic分别电连接到第一焊盘pd1。然而,本公开不限于此示例,并且在一些实施例中,驱动芯片ic可以安装在与显示面板dp不同的膜上。在这种情况下,驱动芯片ic可以通过膜电连接到显示焊盘pdd。
86.感测焊盘pdt可以位于外围区域dp
‑
naa中。感测焊盘pdt可以分别电连接到设置在输入传感器is(例如,参见图2a)中并且后文将描述的多个感测电极。感测焊盘pdt可以包括多个第一感测焊盘td1和多个第二感测焊盘td2。
87.图4是示意性地示出了根据本公开的一些实施例的输入传感器的平面图,并且图5是沿着图4的线i
‑
i'截取的截面图。
88.参照图4和图5,可以在输入传感器is中限定第一区域is
‑
ar1、第二区域is
‑
ar2和第三区域is
‑
ar3。第二区域is
‑
ar2可以包围第一区域is
‑
ar1。第三区域is
‑
ar3可以包围第二区域is
‑
ar2。第二区域is
‑
ar2可以位于第一区域is
‑
ar1和第三区域is
‑
ar3之间。第一区域is
‑
ar1可以与显示面板dp的有源区域dp
‑
aa(例如,参见图3)交叠。第三区域is
‑
ar3可以与显示面板dp的外围区域dp
‑
naa(例如,参见图3)交叠。
89.在一些实施例中,第二区域is
‑
ar2可以与显示面板dp的有源区域dp
‑
aa(例如,参
见图3)交叠。然而,本公开不限于第二区域is
‑
ar2的这种交叠结构。例如,第二区域is
‑
ar2可以与显示面板dp的外围区域dp
‑
naa(例如,参见图3)交叠。
90.输入传感器is可以包括基体绝缘层is
‑
il0、多个感测电极te1和te2以及多条感测线tl1和tl2。
91.感测电极te1和te2可以位于第一区域is
‑
ar1和第二区域is
‑
ar2中。感测电极te1和te2可以包括多个第一感测电极te1和多个第二感测电极te2。
92.每个第一感测电极te1可以在第一方向dr1上延伸。第一感测电极te1可以布置为在第二方向dr2上彼此间隔开。每个第一感测电极te1可以包括主电极me1和子电极se1。例如,每个第一感测电极te1可以包括一个主电极me1和彼此间隔开的两个子电极se1,且主电极me1介于两个子电极se1之间。
93.主电极me1可以包括多个感测图案sp1和多个桥图案bp1。感测图案sp1可以被称为第一感测图案sp1。
94.第一感测电极te1之一可以被称为第一电极te1
‑
1。与第一电极te1
‑
1相邻的另一个第一感测电极te1可以被称为第二电极te1
‑
2。第一电极te1
‑
1的主电极可以被称为第一主电极me1
‑
1,并且第一电极te1
‑
1的子电极可以被称为第一子电极se1
‑
1。第二电极te1
‑
2的主电极可以被称为第二主电极me1
‑
2,并且第二电极te1
‑
2的子电极可以被称为第二子电极se1
‑
2。
95.在第一区域is
‑
ar1中,第一主电极me1
‑
1和第一子电极se1
‑
1可以彼此间隔开,且第二子电极se1
‑
2介于第一主电极me1
‑
1和第一子电极se1
‑
1之间。第二主电极me1
‑
2和第二子电极se1
‑
2可以彼此间隔开,其中第一子电极se1
‑
1介于第二主电极me1
‑
2和第二子电极se1
‑
2之间。
96.当在平面图中观察时,第一子电极se1
‑
1和第二子电极se1
‑
2可以在第二区域is
‑
ar2中彼此交叉。
97.在第一区域is
‑
ar1中,第一主电极me1
‑
1、第二子电极se1
‑
2、第一子电极se1
‑
1和第二主电极me1
‑
2可以在第二方向dr2上顺序地布置。
98.每个第二感测电极te2可以在第二方向dr2上延伸。第二感测电极te2可以布置为在第一方向dr1上彼此间隔开。每个第二感测电极te2可以包括主电极me2和子电极se2。例如,每个第二感测电极te2可以包括一个主电极me2和彼此间隔开的两个子电极se2,且主电极me2介于两个子电极se2之间。
99.主电极me2可以包括多个第一部分sp2和多个第二部分bp2。第一部分sp2可以被称为第二感测图案。
100.第二感测电极te2之一可以被称为第三电极te2
‑
1。与第三电极te2
‑
1相邻的另一个第二感测电极te2可以被称为第四电极te2
‑
2。第三电极te2
‑
1的主电极可以被称为第三主电极me2
‑
1,并且第三电极te2
‑
1的子电极可以被称为第三子电极se2
‑
1。第四电极te2
‑
2的主电极可以被称为第四主电极me2
‑
2,并且第四电极te2
‑
2的子电极可以被称为第四子电极se2
‑
2。
101.在第一区域is
‑
ar1中,第三主电极me2
‑
1和第三子电极se2
‑
1可以彼此间隔开,且第四子电极se2
‑
2介于第三主电极me2
‑
1和第三子电极se2
‑
1之间。第四主电极me2
‑
2和第四子电极se2
‑
2可以彼此间隔开,且第三子电极se2
‑
1介于第四主电极me2
‑
2和第四子电极
se2
‑
2之间。
102.当在平面图中观察时,第三子电极se2
‑
1和第四子电极se2
‑
2可以在第二区域is
‑
ar2中彼此交叉。
103.在第一区域is
‑
ar1中,第三主电极me2
‑
1、第四子电极se2
‑
2、第三子电极se2
‑
1和第四主电极me2
‑
2可以在第一方向dr1上顺序地定位。
104.桥图案bp1和第二部分bp2可以位于不同的层。第二部分bp2可以以电断开的方式与第一感测电极te1交叉。例如,第二部分bp2可以以电断开的方式与每个桥图案bp1交叉。
105.桥图案bp1可以位于基体绝缘层is
‑
il0上。第一绝缘层is
‑
il1可以位于桥图案bp1上。第一绝缘层is
‑
il1可以覆盖桥图案bp1。第一绝缘层is
‑
il1可以由无机材料、有机材料和复合材料中的至少一种形成,或者可以包括无机材料、有机材料和复合材料中的至少一种。桥图案bp1可以具有网格结构。
106.感测图案sp1、第一部分sp2和第二部分bp2可以位于第一绝缘层is
‑
il1上。感测图案sp1、第一部分sp2和第二部分bp2可以具有网格结构。
107.多个接触孔cnt1可以设置为在第三方向dr3上穿过第一绝缘层is
‑
il1。感测图案sp1中的两个相邻的感测图案sp1可以通过相应的接触孔cnt1电连接到桥图案bp1。
108.第二绝缘层is
‑
il2可以位于感测图案sp1、第一部分sp2和第二部分bp2上。第二绝缘层is
‑
il2可以覆盖感测图案sp1、第一部分sp2和第二部分bp2。第二绝缘层is
‑
il2可以由无机材料、有机材料和复合材料中的至少一种形成,或者可以包括无机材料、有机材料和复合材料中的至少一种。
109.图5示出了其中桥图案bp1位于感测图案sp1、第一部分sp2(见图4)和第二部分bp2下方的底桥结构,但是输入传感器is的结构不限于此。例如,在一些实施例中,输入传感器is可以具有其中桥图案bp1位于感测图案sp1、第一部分sp2和第二部分bp2上方的顶桥结构。
110.感测线tl1和tl2可以位于第三区域is
‑
ar3中。感测线tl1和tl2可以包括多条第一感测线tl1和多条第二感测线tl2。第一感测线tl1可以分别电连接到第一感测电极te1。每条第一感测线tl1可以电连接到主电极me1和子电极se1。第二感测线tl2可以分别电连接到第二感测电极te2。每条第二感测线tl2可以电连接到主电极me2和子电极se2。
111.第一感测线tl1可以包括第一线tl1
‑
1和第二线tl1
‑
2。第一主电极me1
‑
1和第一子电极se1
‑
1可以电连接到第一线tl1
‑
1。第二主电极me1
‑
2和第二子电极se1
‑
2可以电连接到第二线tl1
‑
2。
112.第一感测焊盘td1(例如,参见图3)可以通过接触孔分别电连接到第一感测线tl1。第二感测焊盘td2(例如,参见图3)可以通过接触孔分别电连接到第二感测线tl2。
113.电子装置ea(例如,参见图1)还可以包括控制输入传感器is的控制单元ct。输入传感器is的操作模式可以在控制单元ct的控制下交替地切换到第一模式或第二模式。
114.第一模式可以是用于检测输入的触摸模式,所述输入可以通过用户身体的一部分提供。在第一模式下,第一感测电极te1可以输出感测信号,并且第二感测电极te2可以接收驱动信号。这里,电子装置ea可以将驱动信号施加到第二感测电极te2以扫描第一区域is
‑
ar1,并且可以通过使用从第一感测电极te1输出的感测信号感测被施加触摸至此的区域。例如,当输入传感器is处于第一模式时,输入传感器is可以以静电电容方式操作。
115.然而,本公开不限于此示例。例如,在一些实施例中,第一感测电极te1可以被配置为接收驱动信号,并且第二感测电极te2可以被配置为输出感测信号。可选地,第一感测电极te1和第二感测电极te2中的至少一者可以被配置为输出或接收其他另外的电信号。
116.第二模式可以不同于第一模式。第二模式可以是用于检测主动笔pn的笔模式。在第二模式下,可以向第一感测电极te1和第二感测电极te2提供相同的感测信号。
117.输入传感器is可以检测提供到第一感测电极te1和第二感测电极te2的感测信号的在电压和/或电流方面的变化量。输入传感器is可以基于在电压和/或电流方面的变化量计算感测坐标。例如,当输入传感器is处于第二模式时,输入传感器is可以以感测将从外部(例如,主动式静电(aes)笔)输入的驱动信号的方式操作。
118.根据本公开的一些实施例,在第二模式下,随着主动笔pn与输入传感器is接触或移向输入传感器is,可以通过输入传感器is的控制单元ct计算感测坐标。如果主动笔pn的感测部分dt与输入传感器is接触或移向输入传感器is,则感测部分dt与感测电极te1和te2之间的电场可以改变。
119.提供到感测部分dt的电压的幅值可以不同于提供到感测电极te1和te2的电压的幅值。因此,主动笔pn的移动可以导致在感测部分dt与感测电极te1和te2之间的电位方面的变化。由于在电位方面的这种变化,所以在感测部分dt与感测电极te1和te2之间可以存在电场方面的变化。电场的这种变化可以导致在感测电极te1和te2之间的静电电容方面的变化,其由控制单元ct检测并且用于计算主动笔pn的位置坐标。
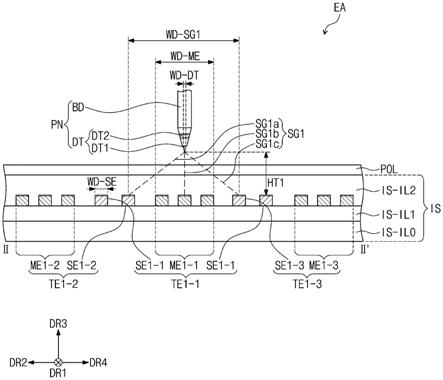
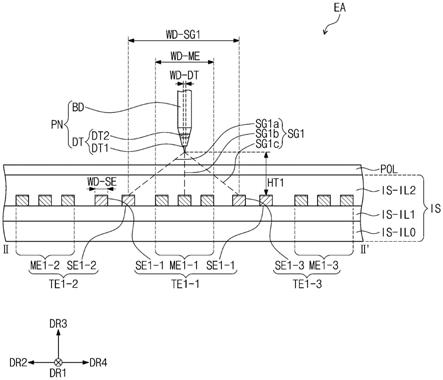
120.图6a是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分,并且图6b是显示出根据本公开的一些实施例的接收第一信号的输入传感器的信号的曲线图。在图6a的以下描述中,为了简洁起见,参照图4和图5描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
121.参照图6a和图6b,抗反射层pol可以位于输入传感器is上。主动笔pn可以位于抗反射层pol上以发送第一信号sg1。
122.感测部分dt可以包括第一笔电极dt1和第二笔电极dt2。第一笔电极dt1可以位于主动笔pn的端部处。第二笔电极dt2可以位于主体部分bd的侧表面上。后文将更详细地描述第二笔电极dt2。
123.第一感测电极te1可以包括还将被称为第二电极te1
‑
3的电极,并且此电极相邻于第一电极te1
‑
1且在第二方向dr2上与第二电极te1
‑
2间隔开,且第一电极te1
‑
1介于第二电极te1
‑
3和第二电极te1
‑
2之间。第二电极te1
‑
3的主电极还可以被称为第二主电极me1
‑
3。第二电极te1
‑
3的子电极还可以被称为第二子电极se1
‑
3。
124.第一电极te1
‑
1以及相邻于第一电极te1
‑
1的第二电极te1
‑
2和te1
‑
3可以具有网格结构。
125.第一主电极me1
‑
1的宽度wd
‑
me可以大于第一子电极se1
‑
1的宽度wd
‑
se。
126.第一笔电极dt1可以发送第一信号sg1。第一信号sg1可以具有第一频率。第一频率可以在从大约100khz至大约140khz的范围内。在一些实施例中,第一频率可以为大约120khz。第一信号sg1可以用于导致在电场方面的变化。控制单元ct可以从基于由感测电极te1和te2测量的电场的变化的计算来获得具有高斯强度分布的感测信号is
‑
sg1。
127.第一信号sg1可以包括第一子信号sg1a、第二子信号sg1b和第三子信号sg1c。第一
子信号sg1a、第二子信号sg1b和第三子信号sg1c可以通过第一信号sg1的发射角来分类。
128.第二子电极se1
‑
2可以用于感测第一子信号sg1a。第一主电极me1
‑
1可以用于感测第二子信号sg1b。另一第二子电极se1
‑
3可以用于感测第三子信号sg1c。
129.控制单元ct(例如,参见图4)可以从由第二子电极se1
‑
2感测的第一子信号sg1a来计算在第二电极te1
‑
2的位置p1处的第一感测信号is
‑
sg1a的第一强度s1。控制单元ct(例如,参见图4)可以从由第一主电极me1
‑
1感测的第二子信号sg1b来计算在第一电极te1
‑
1的位置p2处的第二感测信号is
‑
sg1b的第二强度s2。控制单元ct(例如,参见图4)可以从由另一第二子电极se1
‑
3感测的第三子信号sg1c来计算在另一第二电极te1
‑
3的位置p3处的第三感测信号is
‑
sg1c的第三强度s3。
130.在控制单元ct(例如,参见图4)中,第一感测信号is
‑
sg1a、第二感测信号is
‑
sg1b和第三感测信号is
‑
sg1c可以组合,以形成感测信号is
‑
sg1。控制单元ct(例如,参见图4)可以从感测信号is
‑
sg1以改善的精确度计算主动笔pn的位置坐标。图6b示出了其中第一强度s1等于第三强度s3的示例,但是根据主动笔pn的位置,第一强度s1和第三强度s3可以被识别为不同的强度。
131.例如,如果第一感测信号is
‑
sg1a的第一强度s1不同于第三感测信号is
‑
sg1c的第三强度s3,则可以比较第一强度s1和第三强度s3,从而更精确地计算主动笔pn的位置。如果第一强度s1大于第三强度s3,则控制单元ct(例如,参见图4)可以获得主动笔pn的与从第一主电极me1
‑
1的中心在第二方向dr2上移动的位置对应的坐标。如果第一强度s1小于第三强度s3,则控制单元ct(例如,参见图4)可以获得主动笔pn的与从第一主电极me1
‑
1的中心在与第二方向dr2相反的第四方向dr4上移动的位置对应的坐标。
132.根据本公开的一些实施例,第二子电极se1
‑
2和se1
‑
3中的每一者可以位于第一主电极me1
‑
1与相应的一个第一子电极se1
‑
1之间。第二子电极se1
‑
2和se1
‑
3可以定位成相邻于第一主电极me1
‑
1。第二子电极se1
‑
2和se1
‑
3可以用于感测第一信号sg1或其一部分。控制单元ct(例如,参见图4)可以通过使用第一感测信号is
‑
sg1a和第三感测信号is
‑
sg1c来校正主动笔pn的位置坐标。因此,可以通过使用第一信号sg1改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea。
133.第一信号sg1的电场的有效宽度wd
‑
sg1可以由第一笔电极dt1的宽度wd
‑
dt和/或第一笔电极dt1与感测电极te1和te2之间的距离ht1(例如,在第三方向dr3上的距离ht1)来确定。电场的有效宽度wd
‑
sg1可以是第一子信号sg1a和第三子信号sg1c分别与感测电极te1和te2(例如,参见图4)相遇处的点之间的距离。如果减小第一笔电极dt1的宽度wd
‑
dt来减小主动笔pn的尺寸,则第一信号sg1的电场的有效宽度wd
‑
sg1可以减小。如果减小第一笔电极dt1与感测电极te1和te2(例如,参见图4)之间的距离ht1(例如,通过减小电子装置ea的厚度或尺寸),则第一信号sg1的强度可以增大,并且第一信号sg1的电场的有效宽度wd
‑
sg1可以减小。
134.如果与本公开的实施例不同,第二子电极se1
‑
2和se1
‑
3均不位于第一主电极me1
‑
1和第一子电极se1
‑
1之间,则宽度wd
‑
dt和距离ht1方面的减小可以导致电场的有效宽度wd
‑
sg1的减小,并且在这种情况下,可能难以检测到与第一电极te1
‑
1相邻的第二电极te1
‑
2和te1
‑
3处的第一信号sg1,或者可能难以以高精确度来校正坐标。在这种情况下,由主动笔pn输入的直线可能被识别为z字形。
135.相比之下,在根据本公开的一些实施例的电子装置ea中,感测电极的数目可以不变,每个感测电极可以分为主电极和子电极,并且第二子电极se1
‑
2和se1
‑
3中的每一者可以位于第一主电极me1
‑
1和相应的一个第一子电极se1
‑
1之间。即使当宽度wd
‑
dt或距离ht1减小时,第一信号sg1也可以被位于第一主电极me1
‑
1和第一子电极se1
‑
1之间的第二子电极se1
‑
2和se1
‑
3检测到。在控制单元ct(例如,参见图4)中,可以通过使用第一感测信号is
‑
sg1a和第三感测信号is
‑
sg1c校正主动笔pn的位置坐标。可以通过使用第一信号sg1改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea。
136.图6c是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分。在图6c的以下描述中,为了简洁起见,参照图6a描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
137.参照图6c,电子装置ea
‑
1还可以包括窗口wp。窗口wp可以位于抗反射层pol上。窗口wp可以由光学透明绝缘材料形成,或者可以包括光学透明绝缘材料。例如,窗口wp可以由玻璃和塑料材料中的至少一种形成,或者可以包括玻璃和塑料材料中的至少一种。窗口wp可以具有多层或单层结构。例如,窗口wp可以包括通过粘附材料彼此组合的多个塑料膜,或者通过粘附材料彼此组合的玻璃基板和塑料膜。
138.在一些实施例中,窗口wp可以是厚度ht
‑
wp为大约0.5mm或更薄的薄板。由于窗口wp的这种小厚度,所以可以减小电子装置ea
‑
1的厚度。第一笔电极dt1与感测电极te1和te2(例如,参见图4)之间的距离ht1
‑
1会减小。第一信号sg1的电场的有效宽度wd
‑
sg1会减小。根据本公开的一些实施例,第二子电极se1
‑
2和se1
‑
3中的每一者可以位于第一主电极me1
‑
1与相应的一个第一子电极se1
‑
1之间。控制单元ct(例如,参见图4)可以通过使用由第二子电极se1
‑
2和se1
‑
3感测的信号来校正主动笔pn的位置坐标。可以通过使用第一信号sg1改善主动笔pn相对于电子装置ea
‑
1的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea
‑
1。
139.图7a是沿着图4的线ii
‑
ii'截取的截面图,以示出根据本公开的一些实施例的电子装置的一部分,并且图7b是显示出根据本公开的一些实施例的接收第一信号的输入传感器的信号的曲线图。在图7a的以下描述中,为了简洁起见,参照图6a描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
140.参照图7a和图7b,主动笔pn可以在电子装置ea上进行悬停运动。第一笔电极dt1可以发送第一信号sg1
‑
1。第一信号sg1
‑
1可以包括第一子信号sg1a
‑
1、第二子信号sg1b
‑
1和第三子信号sg1c
‑
1。第一子信号sg1a
‑
1、第二子信号sg1b
‑
1和第三子信号sg1c
‑
1可以由第一信号sg1
‑
1的发射角进行分类。感测电极te1和te2(例如,参见图4)可以用于感测第一信号sg1
‑
1,并且控制单元ct(例如,参见图4)可以从第一信号sg1
‑
1来计算感测信号is
‑
sg2。
141.第二主电极me1
‑
2可以用于感测第一子信号sg1a
‑
1。第一主电极me1
‑
1可以用于感测第二子信号sg1b
‑
1。另一第二主电极me1
‑
3可以用于感测第三子信号sg1c
‑
1。
142.控制单元ct(例如,参见图4)可以从由第二主电极me1
‑
2感测的第一子信号sg1a
‑
1来计算在第二电极te1
‑
2的位置p1
‑
1处的第一感测信号is
‑
sg2a的第一强度s1
‑
1。控制单元ct(例如,参见图4)可以从由第一主电极me1
‑
1感测的第二子信号sg1b
‑
1来计算在第一电极te1
‑
1的位置p2
‑
1处的第二感测信号is
‑
sg2b的第二强度s2
‑
1。控制单元ct(例如,参见图4)
可以从由另一第二主电极me1
‑
3感测的第三子信号sg1c
‑
1来计算在另一第二电极te1
‑
3的位置p3
‑
1处的第三感测信号is
‑
sg2c的第三强度s3
‑
1。
143.控制单元ct(例如,参见图4)可以组合第一感测信号is
‑
sg2a、第二感测信号is
‑
sg2b和第三感测信号is
‑
sg2c,以形成感测信号is
‑
sg2。控制单元ct(例如,参见图4)可以从感测信号is
‑
sg2以改善的精确度来计算主动笔pn的位置坐标。
144.根据本公开的一些实施例,即使当由主动笔pn的悬停运动导致的第一信号sg1
‑
1未被第二子电极se1
‑
2和se1
‑
3正常地检测到时,第一信号sg1
‑
1也可以被第二主电极me1
‑
2和me1
‑
3检测到。因此,可以增加在电子装置ea上处于悬停运动的主动笔pn的可检测到的高度ht2。此外,在控制单元ct(例如,参见图4)中,可以通过使用第一感测信号is
‑
sg2a和第三感测信号is
‑
sg2c来校正主动笔pn的位置坐标。因此,可以通过使用第一信号sg1
‑
1改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea。
145.图8a是示出了根据本公开的一些实施例的电子装置的一部分的透视图,并且图8b是示出了根据本公开的一些实施例的图8a的区域aa的放大图。
146.参照图4、图8a和图8b,感测部分dt可以包括第一笔电极dt1和第二笔电极dt2。第二笔电极dt2可以位于主体部分bd的侧表面上。第二笔电极dt2可以在与主动笔pn的中心轴ax垂直的方向上发送第二信号sg2。第二信号sg2可以具有与第一信号sg1的第一频率不同的第二频率。第二频率可以在从大约210khz至大约250khz的范围内。在一些实施例中,第二频率可以为大约230khz。
147.第一感测电极te1和第二感测电极te2可以用于感测第一信号sg1,并且控制单元ct(例如,参见图4)可以从第一信号sg1来计算第一点pt1的坐标。另外,第一感测电极te1和第二感测电极te2可以用于感测第二信号sg2,并且控制单元ct(例如,参见图4)可以从第二信号sg2来计算第二点pt2的坐标。控制单元ct可以计算第一点pt1和第二点pt2之间的距离ds
‑
pt。
148.控制单元ct可以基于主动笔pn和输入传感器is的几何构型来计算主动笔pn相对于输入传感器is的顶表面is
‑
t的角度ag。例如,可以使用预先记录的第一笔电极dt1与第二笔电极dt2之间的距离ds
‑
dt以及第一点pt1与第二点pt2之间的距离ds
‑
pt来进行该计算。这里,因为主动笔pn足够地靠近输入传感器is,所以可以忽略第一笔电极dt1与输入传感器is的顶表面is
‑
t之间的距离,并且因此,可以将由第一笔电极dt1和第二笔电极dt2以及第一点pt1和第二点pt2限定的几何元素视为三角形。
149.根据本公开的一些实施例,第二子电极se1
‑
2可以位于第一主电极me1
‑
1和第一子电极se1
‑
1之间。第二子电极se1
‑
2可以定位成相邻于第一主电极me1
‑
1。第二子电极se1
‑
2可以用于感测第二信号sg2。控制单元ct可以通过使用由第二子电极se1
‑
2感测的信号来校正第二点pt2的坐标,第二点pt2的坐标用于计算主动笔pn相对于输入传感器is的顶表面is
‑
t的角度ag。因此,可以通过使用第二信号sg2改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea(例如,参见图1)。
150.每个第一感测电极te1的主电极me1可以具有基本上一致的宽度wd
‑
me1。每个第二感测电极te2的主电极me2可以具有基本上一致的宽度wd
‑
me2。
151.在主电极me1和me2中的每一者的宽度不一致的情况下,与由感测电极te1和te2中
的每一者感测的第二信号sg2相关联的值可能因宽度的改变而变化。这可以导致在检测第二信号sg2方面的误差以及在计算主动笔pn相对于输入传感器is的顶表面is
‑
t的角度ag方面的误差。相比之下,根据本公开的一些实施例,因为主电极me1和me2中的每一者具有一致的宽度,所以可以改善与由感测电极te1和te2检测的第二信号sg2相关联的值的可靠性。可以精确地计算主动笔pn相对于输入传感器is的顶表面is
‑
t的角度ag。这可以提供具有改善的可靠性的电子装置ea(例如,参见图1)。
152.图9是示出了根据本公开的一些实施例的输入传感器的平面图。在图9的以下描述中,为了简洁起见,参照图4描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
153.参照图9,第一电极te1
‑
1a可以包括第一主电极me1
‑
1、第一子电极se1
‑
1和第一辅助电极ae1
‑
1。第一辅助电极ae1
‑
1可以在第一方向dr1上延伸。作为与第一电极te1
‑
1a相邻的一个第一感测电极的第二电极te1
‑
2a可以包括第二主电极me1
‑
2、第二子电极se1
‑
2和第二辅助电极ae1
‑
2。第二辅助电极ae1
‑
2可以在第一方向dr1上延伸。
154.第一辅助电极ae1
‑
1可以与第一主电极me1
‑
1间隔开,且第一子电极se1
‑
1介于第一辅助电极ae1
‑
1和第一主电极me1
‑
1之间。在第一区域is
‑
ar1中,第一子电极se1
‑
1和第一辅助电极ae1
‑
1可以位于第二主电极me1
‑
2和第二子电极se1
‑
2之间。
155.第二辅助电极ae1
‑
2可以与第二主电极me1
‑
2间隔开,且第二子电极se1
‑
2介于第二辅助电极ae1
‑
2和第二主电极me1
‑
2之间。在第一区域is
‑
ar1中,第二子电极se1
‑
2和第二辅助电极ae1
‑
2可以位于第一主电极me1
‑
1和第一子电极se1
‑
1之间。
156.当在平面图中观察时,第一辅助电极ae1
‑
1和第二辅助电极ae1
‑
2可以在第二区域is
‑
ar2中彼此交叉。
157.第三电极te2
‑
1a可以包括第三主电极me2
‑
1、第三子电极se2
‑
1和第三辅助电极ae2
‑
1。第三辅助电极ae2
‑
1可以在第二方向dr2上延伸。作为与第三电极te2
‑
1a相邻的一个第二感测电极的第四电极te2
‑
2a可以包括第四主电极me2
‑
2、第四子电极se2
‑
2和第四辅助电极ae2
‑
2。第四辅助电极ae2
‑
2可以在第二方向dr2上延伸。
158.第三辅助电极ae2
‑
1可以与第三主电极me2
‑
1间隔开,且第三子电极se2
‑
1介于第三辅助电极ae2
‑
1和第三主电极me2
‑
1之间。在第一区域is
‑
ar1中,第三子电极se2
‑
1和第三辅助电极ae2
‑
1可以位于第四主电极me2
‑
2和第四子电极se2
‑
2之间。
159.第四辅助电极ae2
‑
2可以与第四主电极me2
‑
2间隔开,且第四子电极se2
‑
2介于第四辅助电极ae2
‑
2和第四主电极me2
‑
2之间。在第一区域is
‑
ar1中,第四子电极se2
‑
2和第四辅助电极ae2
‑
2可以位于第三主电极me2
‑
1和第三子电极se2
‑
1之间。
160.当在平面图中观察时,第三辅助电极ae2
‑
1和第四辅助电极ae2
‑
2可以在第二区域is
‑
ar2中彼此交叉。
161.在一些实施例中,第二辅助电极ae1
‑
2可以定位成相邻于第一主电极me1
‑
1。第二辅助电极ae1
‑
2可以用于感测第一信号sg1(例如,参见图6a)。控制单元ct(例如,参见图4)可以通过使用由第二辅助电极ae1
‑
2感测的信号来校正主动笔pn(例如,参见图6a)的位置坐标。参照图6a,可以通过使用第一信号sg1改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea(例如,参见图6a)。尽管基于第二辅助电极ae1
‑
2给出了以上描述,但是本公开不限于此,并且其他辅助电极ae1
‑
1、ae2
‑
1和ae2
‑
2也可以被构造为与第二辅助电极ae1
‑
2具有相同的效果。
162.图10是示出了根据本公开的一些实施例的输入传感器的平面图。在图10的以下描述中,为了简洁起见,参照图4描述的元件可以由相似或相同的附图标记标识,而未重复对其的重叠描述。
163.参照图10,第一电极te1
‑
1b可以包括第一主电极me1
‑
1、第一子电极se1
‑
1和至少一个第一连接图案cp1
‑
1。所述至少一个第一连接图案cp1
‑
1可以在第一区域is
‑
ar1中将第一主电极me1
‑
1和第一子电极se1
‑
1彼此连接。
164.作为与第一电极te1
‑
1b相邻的一个第一感测电极的第二电极te1
‑
2b可以包括第二主电极me1
‑
2、第二子电极se1
‑
2和至少一个第二连接图案cp1
‑
2。所述至少一个第二连接图案cp1
‑
2可以在第一区域is
‑
ar1中将第二主电极me1
‑
2和第二子电极se1
‑
2彼此连接。
165.图10示出了提供了两个第一连接图案cp1
‑
1和一个第二连接图案cp1
‑
2的示例,但是第一连接图案cp1
‑
1和第二连接图案cp1
‑
2中的每一者的数目不限于此。
166.当在平面图中观察时,第一连接图案cp1
‑
1可以以电断开的方式与第二子电极se1
‑
2交叉。第二连接图案cp1
‑
2可以以电断开的方式与第一子电极se1
‑
1交叉。
167.第三电极te2
‑
1b可以包括第三主电极me2
‑
1、第三子电极se2
‑
1和至少一个第三连接图案cp2
‑
1。所述至少一个第三连接图案cp2
‑
1可以在第一区域is
‑
ar1中将第三主电极me2
‑
1和第三子电极se2
‑
1彼此连接。
168.作为与第三电极te2
‑
1b相邻的一个第二感测电极的第四电极te2
‑
2b可以包括第四主电极me2
‑
2、第四子电极se2
‑
2和至少一个第四连接图案cp2
‑
2。所述至少一个第四连接图案cp2
‑
2可以在第一区域is
‑
ar1中将第四主电极me2
‑
2和第四子电极se2
‑
2彼此连接。
169.图10示出了其中提供了三个第三连接图案cp2
‑
1和两个第四连接图案cp2
‑
2的示例,但是第三连接图案cp2
‑
1和第四连接图案cp2
‑
2中的每一者的数目不限于此。
170.当在平面图中观察时,第三连接图案cp2
‑
1可以以电断开的方式与第四子电极se2
‑
2交叉。第四连接图案cp2
‑
2可以以电断开的方式与第三子电极se2
‑
1交叉。
171.根据本公开的一些实施例,所述至少一个第一连接图案cp1
‑
1可以在第一区域is
‑
ar1中将第一主电极me1
‑
1和第一子电极se1
‑
1彼此连接。所述至少一个第一连接图案cp1
‑
1可以减小第二区域is
‑
ar2的面积。因此,可以提供具有减小的边框区域的电子装置ea(例如,参见图1)。尽管基于第一连接图案cp1
‑
1给出了以上描述,但是本公开不限于此,并且其他连接图案cp1
‑
2、cp2
‑
1和cp2
‑
2也可以被构造为与第一连接图案cp1
‑
1具有相同的效果。
172.根据本公开的一些实施例,多个第一连接图案cp1
‑
1可以连接到第一主电极me1
‑
1和第一子电极se1
‑
1中的每一者。在这种情况下,可以减小第一电极te1
‑
1b的电阻。此外,可以抑制与第一电极te1
‑
1b相关联的rc延迟问题。即,可以减小或防止通过第一电极te1
‑
1b传送的信号的延迟,由此提高了信号的传输速度。因此,可以提供具有改善的可靠性的电子装置ea(例如,参见图1)。尽管基于第一连接图案cp1
‑
1给出了以上描述,但是本公开不限于此,并且其他连接图案cp1
‑
2、cp2
‑
1和cp2
‑
2也可以被构造为与第一连接图案cp1
‑
1具有相同的效果。
173.根据本公开的一些实施例,第二子电极se1
‑
2可以定位成相邻于第一主电极me1
‑
1。第二子电极se1
‑
2可以用于感测第一信号sg1(例如,参见图6a)。控制单元ct(例如,参见图4)可以通过使用由第二子电极se1
‑
2感测的信号来校正主动笔pn(例如,参见图6a)的位
置坐标。参照图6a,可以通过使用第一信号sg1改善主动笔pn相对于电子装置ea的位置坐标方面的精确度。这可以提供具有改善的感测可靠性的电子装置ea(例如,参见图6a)。
174.根据本公开的一些实施例,每个感测电极可以包括主电极和子电极。在每个感测电极的主电极和子电极之间可以存在相邻的感测电极的子电极。控制单元可以通过每个感测电极的主电极和相邻的感测电极的子电极感测从主动笔提供的信号。在控制单元中,可以通过使用通过每个感测电极的主电极和相邻的感测电极的子电极输入的信号来校正主动笔的位置坐标。因此,可以改善用于输入信号的主动笔相对于电子装置的位置坐标方面的精确度。因此,可以提供具有改善的感测可靠性的电子装置。
175.尽管已经具体示出并描述了本公开的实施例,但是本领域普通技术人员将理解,可以在不脱离所附权利要求的精神和范围的情况下在其中进行形式和细节上的变化,其功能等同物将被包括在其中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。