1.本发明涉及车辆无人驾驶领域,特别涉及一种基于车辆运动信息的轨迹预测方法、系统和存储介质。
背景技术:
2.轨迹预测模块主要解决自动驾驶车辆与周围环境中的其它运动物体(车辆、行人等)的协同交互问题。该模块对感知模块所检测到的运动物体进行未来一段时间内行为意图的预测,并将预测的结果转化为时间维度和空间维度的轨迹。以这些障碍车、行人、非机动车等运动物体的预测轨迹作为输入,自动驾驶车辆可以做出更加合理的驾驶决策,规划出更加合理、安全的车辆运动行为。比如果我们预测到其它车辆要并入到我们的车道,那我们就需要提前考虑减速,预测的准确性越高,决策就越准确,无人驾驶的可靠性也就越高。
3.现有的车辆的轨迹预测方法大多是在历史轨迹上拟合多项式,进行轨迹的预测,但是预测的准确度不够高,为了提高预测的准确度,本技术提出了一种解决方案。
技术实现要素:
4.发明目的:本发明的目的是提供一种基于车辆运动信息的轨迹预测方法、系统和存储介质,利用障碍物的历史轨迹进行较为准确的障碍物轨迹预测,为自身车辆提供更加准确可靠的驾驶操作决策。
5.技术方案:本发明所述的一种基于车辆运动信息的轨迹预测方法,具体包括以下步骤:
6.s1:采集环境车辆的历史数据信息data1;
7.s2:对采集的历史数据信息data1中的无用数据进行剔除后进一步处理,最终形成数据data;
8.s3:构建轨迹预测的深度学习模型,将data放入深度学习模型中进行计算;
9.s4:对data进行深度学习模型中计算的结果进行处理,得到最终的轨迹预测结果。
10.作为优选,所述s1中采集环境车辆的历史数据data1具体包括以下步骤:
11.s1.1:收集t0时刻环境车辆在地图坐标系下横轴x坐标、y坐标、环境车辆的速度anglee以及环境车辆相对于y轴的角度angle;
12.s1.2:在s1.1的基础上连续收集100个时刻的环境车辆数据,形成环境车辆的历史数据data1;
13.s1.3:对data1中连续100个时刻的环境车辆数据按照时序进行存储。
14.作为优选,所述s1中采集数据的维度为100*4,所述采集数据的频率为100ms一次。
15.作为优选,所述s2中对历史数据信息data1的处理具体包括以下步骤:
16.s2.1:对data1进行剔除操作,计算相邻数据之间的欧式距离,如果两者的欧式距离大于20,则将该数据剔除;
17.s2.2:将data1中完成剔除数据操作的剩余数据进行角度转换,转换为弧度,得到
数据data2;
18.s2.3:对data2中的数据进行随机截取,截取70个作为最终的数据data。
19.作为优选,所述s3具体包括以下步骤:
20.s3.1:构建轨迹预测的深度学习模型;
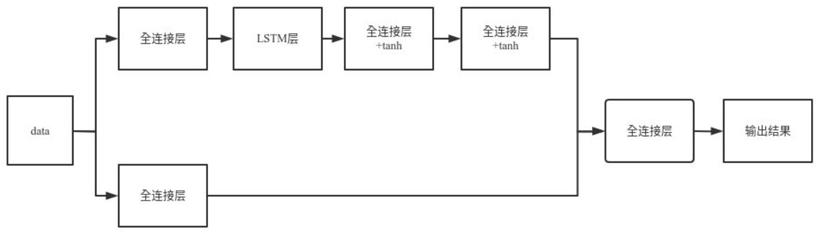
21.s3.2:将s2最终的数据data放入深度学习模型中进行计算,data进入模型后分别进入两个通道,一个通道通过全连接层对历史轨迹特征进行编码后输出;另一个通道通过全连接层对历史轨迹特征进行编码后再接入lstm长短期记忆网络,然后再通过全连接层和激活函数对特征进行进一步编码;最后融合两个通道的结果得出模型回归的结果mr。
22.作为优选,所述s3.2中模型回归的结果mr的维度为70*4。
23.作为优选,所述s4中对data进行深度学习模型中计算的结果进行处理具体为将mr进行处理,截取三十个维度的数据为最终的预测结果trajectpoint,trajectpoint的维度为30*4。
24.有益效果:本发明通过对环境车辆的轨迹数据进行分析,结合lstm算法提高了对车辆的行驶轨迹预测的准确性,使轨迹预测的结果更加符合车辆的行车常识,从而给自身车辆的自动驾驶系统提供更多的预测信息,提高了无人驾驶的可靠性。
附图说明
25.图1是轨迹预测的深度学习模型;
26.图2是部分环境车辆轨迹预测的结果a;
27.图3是部分环境车辆轨迹预测的结果b。
具体实施方式
28.下面将结合本技术实施例中的附图1
‑
3,对本技术实施例中的技术方案进行清楚、完整地描述。
29.本发明中,一种基于车辆运动信息的轨迹预测方法,具体包括以下步骤:
30.s1:采集环境车辆的历史数据信息data1,具体包括以下步骤:
31.s1.1:收集t0时刻环境车辆在地图坐标系下横轴x坐标、y坐标、环境车辆的速度anglee以及环境车辆相对于y轴的角度angle;
32.s1.2:在s1.1的基础上连续收集100个时刻的环境车辆数据,采集的频率为100ms一次,形成环境车辆的历史数据data1;
33.s1.3:对data1中连续100个时刻的环境车辆数据按照时序进行存储。
34.其中采集数据的维度为100*4。
35.s2:对采集的历史数据信息data1进一步处理,最终形成数据data,具体包括以下步骤:
36.s2.1:对data1进行剔除操作,计算相邻数据之间的欧式距离,如果两者的欧式距离大于20,则将该数据剔除;
37.s2.2:将data1中完成剔除数据操作的剩余数据进行角度转换,转换为弧度,得到数据data2;
38.s2.3:对data2中的数据进行随机截取,截取70个作为最终的数据data。
39.s3:运用lstm算法对data进行计算,具体包括以下步骤:
40.s3.1:构建轨迹预测的深度学习模型,如图1所示为模型结构;
41.s3.2:将s2最终的数据data放入深度学习模型中进行计算,data进入模型后分别进入两个通道,一个通道通过全连接层对历史轨迹特征进行编码后输出;另一个通道通过全连接层对历史轨迹特征进行编码后再接入lstm长短期记忆网络,然后再通过全连接层和激活函数对特征进行进一步编码;最后融合两个通道的结果得出模型回归的结果mr,mr的维度为70*4。
42.s4:对data进行深度学习模型中计算的结果进行处理具体为将mr进行处理,截取三十个维度的数据为最终的预测结果trajectpoint,trajectpoint的维度为30*4,最后将trajectpoint作为轨迹预测结果输出,如图2
‑
3所示粗线部分为部分环境车辆轨迹预测的结果。
43.本实施例还提供了一种基于车辆运动信息的轨迹预测系统,包括有网络接口、存储器和处理器,其中网络接口,用于在与其他外部网元之间进行收发信息过程中,实现信号的接收和发送;存储器,用于存储能够在所述处理器上运行的计算机程序指令;处理器,用于在运行所述计算机程序指令时,执行上述基于车辆运动信息的轨迹预测的步骤。
44.本实施例还提供了一种计算机存储介质,该计算机存储介质存储有计算机程序,在处理器执行所述计算机程序时可实现以上所描述的方法。所述计算机可读介质可以被认为是有形的且非暂时性的。非暂时性有形计算机可读介质的非限制性示例包括非易失性存储器电路(例如闪存电路、可擦除可编程只读存储器电路或掩膜只读存储器电路)、易失性存储器电路(例如静态随机存取存储器电路或动态随机存取存储器电路)、磁存储介质(例如模拟或数字磁带或硬盘驱动器)和光存储介质(例如cd、dvd或蓝光光盘)等。计算机程序包括存储在至少一个非暂时性有形计算机可读介质上的处理器可执行指令。计算机程序还可以包括或依赖于存储的数据。计算机程序可以包括与专用计算机的硬件交互的基本输入/输出系统(bios)、与专用计算机的特定设备交互的设备驱动程序、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
45.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
46.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。