1.本发明涉及质量时变结构模态识别技术领域,特别是指一种考虑质量波动共振声混料机实时固有频率识别方法。
背景技术:
2.共振声混合(resonant acoustic mixing,ram)是基于振动宏观混合和声流微观混合耦合作用的混合的工艺技术,其主要原理是对混料机施加与其结构固有频率一致的周期激振力,使混料机其达到共振状态,使待混材料获得一定的加速度,从而达到均匀混合的目的。该混合工艺具有混合效率高、均匀性好、危险刺激量小等优势;适用于超细材料、高粘态材料等的分散混合,已逐渐应用到医药、食品、生物、化妆品、含能材料等化工领域。
3.据其原理,共振声混合工艺的技术首先是获取混料机结构固有频率,然后施加与混料机结构固有频率一致的周期激振力使其达到共振状态。传统的的获取混料机固有频率的方法主要是扫频法,列如申请号为cn201621117554.0的专利中所述,此方法缺点是没有考虑到混合过程中由于材料在容器中的运动导致质量波动引起的固有频率变化的影响,由于混料时容器内的材料运动过程中受到抛掷力及惯性力的影响导致负载机构等效质量在不断变化,由于输入与输出的关系,混料机质量波动必然导致其响应输出也在不断变化。在实际使用中由于质量波动引起的固有频率微小变化会导致结构响应会有较明显的改变,容易造成混料机运行不稳,存在安全隐患。
技术实现要素:
4.针对现有技术在实际使用中由于质量波动引起的固有频率微小变化会导致结构响应会有较明显的改变,容易造成混料机运行不稳,存在安全隐患的技术问题,本发明提出了一种考虑质量波动共振声混料机实时固有频率识别方法,旨在共振声混料机在运行过程中实时在线的识别其固有频率,控制音圈电机激振力的频率与固有频率保持一致,使机器能够稳定运行。
5.本发明的技术方案是这样实现的:
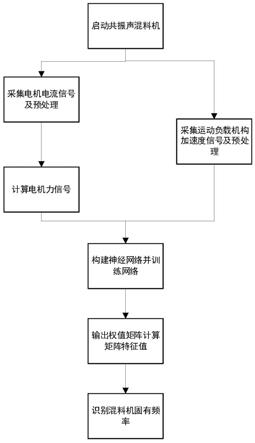
6.一种考虑质量波动共振声混料机实时固有频率识别方法,其步骤如下:
7.步骤一:启动混料机,给混料机音圈电机施加一稳定周期的电压信号,混料机音圈电机输出周期变化的激振力,使混料机处于受迫振动状态;
8.步骤二:利用电流传感器采集混料机音圈电机的电流信号,同时利用加速度传感器采集混料机运动负载机构的加速度信号,并分别对采集到的电流信号和加速度信号进行预处理;
9.步骤三:根据步骤二中预处理后的电流信号计算混料机音圈电机的激振力信号;
10.步骤四:建立线性神经网络训练模型,将步骤三中的激振力信号作为混料机输入值,将步骤二中的预处理后的加速度信号作为混料机输出值,利用输入值和输出值对线性神经网络训练模型进行训练,训练完成后输出权值矩阵;
11.步骤五:根据振动原理和权值矩阵计算混料机的实时固有频率,并根据实时固有频率调节混料机音圈电机输入的电流信号的频率。
12.优选地,所述电压信号为正弦电压信号或余弦电压信号。
13.优选地,所述分别对采集到的电流信号和加速度信号进行预处理的方法为:
14.利用递推平均滤波方法分别对电流信号和加速度信号进行处理,去除信号中的尖峰脉冲;递推平均滤波方法的原理为:
[0015][0016][0017]
其中,n为每次平均的信号点数,t表示时刻,i1(t)为去除尖峰脉冲后的电流信号,i(t
‑
i)为t
‑
i时刻采集到的电流信号,a1(t)为去除尖峰脉冲后的加速度信号,a(t
‑
i)为t
‑
i时刻采集到的加速度信号,i=1,2,
…
,n
‑
1;
[0018]
利用最小二乘法分别对电流信号和加速度信号进行非线性处理,去除非线性趋势项;
[0019]
利用最小二乘法对电流信号拟合出的多项式为:g(t)=c0 c1t c2t2 ... c
k
t
k
;
[0020]
利用最小二乘法对加速度信号拟合出的多项式为:u(t)=b0 b1t b2t2 ... b
k
t
k
;
[0021]
其中,c
j
、b
j
均表示多项式的系数,j=0,1,
…
,k,g(t)表示电流信号的非线性趋势项,u(t)表示加速度信号的非线性趋势项;
[0022]
利用电流信号i1(t)减去g(t)得到预处理后的电流信号i2(t):i2(t)=i1(t)
‑
g(t);
[0023]
利用加速度信号a1(t)减去u(t)得到预处理后的加速度信号a2(t):a2(t)=a1(t)
‑
u(t)。
[0024]
根据权利要求3所述的考虑质量波动共振声混料机实时固有频率识别方法,其特征在于,所述混料机音圈电机的激振力信号的计算方法为:
[0025]
f(t)=bli2(t)n;
[0026]
其中,f(t)为激振力信号,b为电机磁场强度,l为电机每匝线圈有效长度,i(t)为预处理后的电流信号,n电机线圈匝数。
[0027]
优选地,在步骤四中,根据混料机实际结构自由度数n选择神经元个数s,选取网络学习率和目标误差e对线性神经网络训练模型进行训练;
[0028]
根据离散系统的运动差分方程构建线性神经网络训练模型的矩阵方程:
[0029][0030]
其中,均为s1×
s1的权值系数方阵,w
q
表示加速度权值矩阵待求元素,v
q
表示力信号矩阵待求元素,q=1,2,
…
,s1,a
t
表示t时刻的预处理后的加速度值,a
t
‑1表示t
‑
1时刻的预处理后的加速度值,f
t
表示t时刻的激振力,i
为单位矩阵;
[0031]
根据混料机输入值和输出值构建线性神经网络训练样本p:
[0032]
p=[(f
t
,a
t
);a
t 1
];
[0033]
其中,(f
t
,a
t
)为神经网络输入值,a
t 1
为网络期望输出,a
t 1
表示t 1时刻的预处理后的加速度值。
[0034]
优选地,所述神经元个数s选取的规则为s=2n/m,其中,n为混料机系统自由度数m为采集响应信号的通道数。
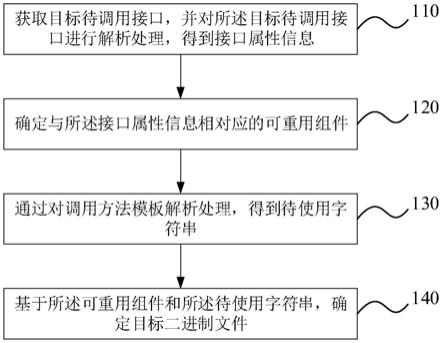
[0035]
优选地,所述混料机的实时固有频率的计算方法为:
[0036]
计算权值矩阵的共轭特征值λ
i
、λ
i*
和特征向量为则混料机的实时固有频率w
i
为:
[0037][0038]
其中,δt表示信号采样时间间隔。
[0039]
一种考虑质量波动共振声混料机实时固有频率识别系统,包括运动负载机构、加速度传感器、共振混料机固有频率测控系统、电流传感器和混料机音圈电机,运动负载机构上设有加速度传感器,加速度传感器与共振混料机固有频率测控系统相连接;运动负载机构下部设有混料机音圈电机,混料机音圈电机与电流传感器相连接,电流传感器与共振混料机固有频率测控系统相连接。
[0040]
优选地,所述运动负载机构通过弹簧机构固定在地面上。
[0041]
与现有技术相比,本发明产生的有益效果为:
[0042]
1)本发明提出的混料机固有频率识别的方法,通过实时采集电机电流信号,进一步计算激振力信号结合运动负载机构的加速度响应信号尽力神经网络训练样本,通过神经网络方法,能够实现混料机在运行过程中的实时固有频率识别。
[0043]
2)本发明采用递推平均滤波方法和最小二乘法去除趋势项方法,可以有效的去除传感器信号中存在的尖峰脉冲噪声以及由于结构温度变化引起的信号线性和非线性趋势项。得到理想的电流和加速度信号。
[0044]
3)本发明提出的混料机固有频率识别方法基于一种神经网络模型,其识别结果抗噪性强,具有较好的鲁棒性。由于神经网络模型中神经元个数选择考虑了混料机结构自由度数,且训练样本前期进行了预处理去除了高频噪声和低阶趋势项,因此采用本方法识别出的固有频率,避免了虚假模态的干扰,识别准确性高。
[0045]
4)本发明提出的混料机固有频率识别方法优点是其识别出的固有频率考虑了混料机在运行过程中的负载机构质量变化,由于混料时容器内的材料运动过程中受到抛掷作用导致负载机构等效质量在不断变化,由于输入与输出的关系,混料机质量波动必然导致其响应输出也在不断变化。本方法根据传感器采集的不断变化的激振力及加速度输出信号,构建神经网络训练模型能够成功识别出随质量变化的混料机固有频率。
附图说明
[0046]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0047]
图1为本发明方法的流程图;
[0048]
图2为本发明实施例中涉及的系统框图,其中,1为运动负载机构,2为加速度传感器,3为共振混料机固有频率测控系统,4为电流传感器,5为弹簧机构,6为混料机音圈电机;
[0049]
图3为共振声混料机音圈电机激振力产生原理示意图,其中,7为永磁体,8为运动机构,9为电机线圈。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0051]
如图2所示,本发明方法涉及的一种考虑质量波动共振声混料机实时固有频率识别系统,包括运动负载机构1、加速度传感器2、共振混料机固有频率测控系统3、电流传感器4和混料机音圈电机6,所述运动负载机构1下部设有混料机音圈电机6,混料机音圈电机6与电流传感器4相连接,电流传感器4与共振混料机固有频率测控系统3相连接。电流传感器4负责采集混料机音圈电机6的输入电流i(t),并反馈到共振混料机固有频率测控系统3中。运动负载机构1通过弹簧机构5固定在地面上;运动负载机构1上安装有加速度传感器2,加速度传感器2与共振混料机固有频率测控系统3相连接;加速度传感器2采集到的加速度信号a(t)同样反馈到共振混料机固有频率测控系统3中,由共振混料机固有频率测控系统3对激振力信号与加速度响应信号进行处理,实时的识别出共振声混料机振动过程中的固有频率。
[0052]
如图1所示,一种考虑质量波动共振声混料机实时固有频率识别方法,由于混料时容器内的材料运动过程中受到抛掷作用导致负载机构等效质量在不断变化,由于输入与输出的关系,混料机质量波动必然导致其响应输出也在不断变化。本发明根据传感器采集的不断变化的激振力及加速度输出信号,根据离散的混料机激振力与加速度响应对应的差分方程,将差分方程系数矩阵当做待求参数,建立线性神经网络(lnn)训练模型,将混料机激振力作为网络输入,测得的加速度响应信号作为网络输出,对网络进行训练,训练结束输出权值矩阵,求解权值矩阵特征值和特征向量,进一步求出结构实时固有频率。控制音圈电机激振力的频率与固有频率保持一致,使机器能够稳定运行。具体步骤如下:
[0053]
步骤一:启动混料机,给混料机音圈电机施加一稳定周期的电压信号,混料机音圈电机输出周期变化的激振力,使混料机处于受迫振动状态;如图3所示,电机线圈9在接收到周期电压信号后线圈中会产生方向变化的电流,由于洛伦兹力原理,电机线圈9在永磁体7生成的固定磁场中会产生方向周期变化的力,使得线圈运动机构8推动混料机系统处于受迫振动状态;所述电压信号为正弦电压信号或余弦电压信号。本实施例中合适的启动电压幅值大小为
±
1~
±
3v,电压信号频率为30~80hz。
[0054]
步骤二:利用电流传感器采集混料机音圈电机的电流信号,同时利用加速度传感器采集混料机运动负载机构的加速度信号,并分别对采集到的电流信号和加速度信号进行
预处理;传感器在采集电流时,由于电路噪声的影响采集的电流信号会产生小的尖峰脉冲,且混料机在运行时处于高频共振状态,混料容器中材料由于自身摩擦作用温度会略微升高,由于热传导作用,传感器温度也会升高,为了去除传感器采集信号时温漂现象,对步骤一中采集到的音圈电机电流信号与混料机加速度响应信号进行预处理,去除信号尖峰脉冲及趋势项。
[0055]
利用递推平均滤波方法分别对电流信号和加速度信号进行处理,去除信号中的尖峰脉冲;递推平均滤波方法的原理为:
[0056][0057][0058]
其中,n为每次平均的信号点数,t表示时刻,i1(t)为去除尖峰脉冲后的电流信号,i(t
‑
i)为t
‑
i时刻采集到的电流信号,a1(t)为去除尖峰脉冲后的加速度信号,a(t
‑
i)为t
‑
i时刻采集到的加速度信号,i=1,2,
…
,n
‑
1。本实施例中n=20。
[0059]
利用最小二乘法分别对电流信号和加速度信号进行非线性处理,去除非线性趋势项;
[0060]
利用最小二乘法对电流信号拟合出的多项式为:g(t)=c0 c1t c2t2 ... c
k
t
k
;
[0061]
利用最小二乘法对加速度信号拟合出的多项式为:u(t)=b0 b1t b2t2 ... b
k
t
k
;
[0062]
其中,c
j
、b
j
均表示多项式的系数,j=0,1,
…
,k,g(t)表示电流信号的非线性趋势项,u(t)表示加速度信号的非线性趋势项;k为选取的拟合阶数,一般取1~2阶,本实施例中k=2。
[0063]
利用电流信号i1(t)减去g(t)得到预处理后的电流信号i2(t):i2(t)=i1(t)
‑
g(t)。
[0064]
利用加速度信号a1(t)减去u(t)得到预处理后的加速度信号a2(t):a2(t)=a1(t)
‑
u(t)。
[0065]
步骤三:根据步骤二中预处理后的电流信号计算混料机音圈电机的激振力信号;
[0066]
混料机音圈电机工作原理为,给电机施加一定周期变化的电压u(t),电机线圈中产生同样周期变化的电流i(t),由于洛伦兹力的作用,电机会输出一个周期变化的激振力f(t),由于电机处于运动状态,加上混料机结构的限制,直接测量音圈电机激振力较为困难,所以本发明中所采集的混料机音圈电机激振力f(t)信号是根据混料机输入的电流信号i(t)转化为音圈电机洛伦兹力求得,具体计算方法为:
[0067]
f(t)=bli2(t)n;
[0068]
其中,f(t)为激振力信号,b为电机磁场强度,l为电机每匝线圈有效长度,i(t)为预处理后的电流信号,n电机线圈匝数。有激振力计算原理可知f与电流i频率一致。
[0069]
步骤四:建立线性神经网络训练模型,将步骤三中的激振力信号作为混料机输入值,将步骤二中的预处理后的加速度信号作为混料机输出值,利用输入值和输出值对线性神经网络训练模型进行训练,训练完成后输出权值矩阵。
[0070]
在步骤四中,根据混料机实际结构自由度数n选择神经元个数s,选取网络学习率和目标误差e对线性神经网络训练模型进行训练。
[0071]
离散系统的运动差分方程形式为:
[0072]
y(t)=wy(t
‑
1) vf
′
(t
‑
1);
[0073]
其中,下标n为结构自由度个数。y
n
(t)表示当前时刻第n个自由度响应输出,f
n
′
(t)表示当前时刻第n个自由度激振力输入;可知当前时刻的结构响应输出y(t)只与前一时刻的响应与激振力有关,w与v为待求参数矩阵。
[0074]
根据离散系统的运动差分方程构建线性神经网络训练模型的矩阵方程:
[0075][0076]
其中,均为s1×
s1的权值系数方阵,w
q
表示加速度权值矩阵待求元素,v
q
表示力信号矩阵待求元素,q=1,2,
…
,s1,a
t
表示t时刻的预处理后的加速度值,a
t
‑1表示t
‑
1时刻的预处理后的加速度值,f
t
表示t时刻的激振力,i为单位矩阵。权值系数方阵和的元素为未知量,通过训练神经网络求出矩阵未知量。
[0077]
根据混料机输入值和输出值构建线性神经网络训练样本p:
[0078]
p=[(f
t
,a
t
);a
t 1
];
[0079]
其中,(f
t
,a
t
)为神经网络输入值,a
t 1
为网络期望输出,a
t 1
表示t 1时刻的预处理后的加速度值。
[0080]
所述神经元个数s选取的规则为s=2n/m,其中,m为采集响应信号的通道数。一般的混料机响应信号采集通道只有一个,故m值为1,即神经网络模型神经元个数为s=2
×
2/1=4个,训练时使用神经元激活函数使用线性的purelin函数。为了保证神经网络的训练速度以及网络的稳定性,网络学习速率不能过大或过小,一般学习速率的取值范围在0.001
‑
0.8之间;本实施例中,学习网络设置为0.7。为了保证训练后神经网络的准确性,设置的目标误差e不宜过大,但误差过小导致训练时间过长,有可能导致网络训练不能收敛。为了确保训练后神经网络的准确性以及保证网络训练误差能够正常收敛,本实施例中训练误差e为10
‑3。
[0081]
步骤五:根据振动原理和权值矩阵计算混料机的实时固有频率,并根据实时固有频率调节混料机音圈电机输入的电流信号的频率。
[0082]
对于步骤四中输出的权值矩阵求特征值λ及特征向量根据特征值λ及特征向量求解结构固有频率w
i
。计算权值矩阵的共轭特征值λ
i
、λ
i*
和特征向量为则混料机的实时固有频率w
i
为:
[0083][0084]
其中,δt表示信号采样时间间隔。由于前期对信号进行了预处理,去除了高频尖峰脉冲噪声以及低阶非线性趋势项,本实施例中,识别出的固有频率w
i
个数和结构自由度
数n一致,由于混料时容器中材料运动过程中的质量波动,识别出的混料机实时固有频率也是一波动值,本实施例中识别出的混料机固有频率为20.72~21.35hz,二阶固有频率为54.14~55.08hz。
[0085]
根据识别出混料机i阶固有频率,为了使混料机混料时容器内的加速度能够达到较大值,在控制输入混料机电流频率时优选高阶频率。根据识别出的混料机固有频率,调节电机输入的电流信号的频率,即保持音圈电机输出的实时激振力频率与混料机固有频率保持一致,使其能够在共振状态下正常运行。
[0086]
本发明可以在共振声混料机运行过程中实时在线的识别出其固有频率,通过进一步控制音圈电机激振力的频率使其与混料机固有频率保持一致,使机器能够稳定运行。
[0087]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。