1.本实用新型涉及智能机器人技术领域,尤其涉及一种机器人电机双重绝对位置编码装置。
背景技术:
2.现有的足式机器人或机械臂电机,内置有行星减速机,从而使减速机输出端和电机转子之间有速度/位移差。目前,在转子上安装有磁片,相对的霍尔位置传感器获取的转速与转子的转速相同,但减速机输出端输出的转速与电机转子的转速不同,因此,霍尔位置传感器传输给计算机的值与转子旋转的位置相同,但无法在加电初始化时正确获取减速机输出端的绝对位置,又因为安装电机时由于紧固部件的限制,不可能将角度严格设置在规定角度的范围正中间,致使机器人经常发生开机时动作错乱的问题。
技术实现要素:
3.本实用新型的目的在于克服上述不足,提供一种机器人电机双重绝对位置编码装置,通过在电机封闭端的转子端部固装端部齿轮,端部齿轮与齿轮组形成减速机构,与电机输出端减速机构的减速比相同,且在端部齿轮及齿轮组末端齿轮上分别设置处于同一水平面的磁片,每个所述磁片上方均对应安装有相同精度的位置感应装置,且所述磁片与所述位置感应装置设有相同间隙,所述位置感应装置均与计算机相连,即通过双重绝对位置编码装置,能够精确获得当前电机输出端的绝对位置,无论开机时四足机器人或机械臂处于何种角度,电机均可输出当前输出端的绝对角度数据给机器人控制系统,彻底解决了机器人开机时动作错乱的问题。
4.本实用新型提供的具体技术方案如下:
5.一种机器人电机双重绝对位置编码装置,包括电机的定子和转子,在所述电机封闭端的转子端部固装有端部齿轮,还设有与所述端部齿轮相配合形成减速机构的齿轮组,所述齿轮组的末端齿轮及所述端部齿轮的顶端均装有磁片,且所述磁片位于同一水平面,所述减速机构的上部设有电路板,所述电路板内侧对应所述磁片分别设有位置感应装置,且所述磁片与所述位置感应装置设有相同的间隙。
6.优选地,所述齿轮组设有与所述端部齿轮配合的齿轮一,与所述齿轮一同轴的齿轮二与齿轮三相配合,且所述端部齿轮与所述齿轮三的顶端均装有磁片。
7.优选地,所述端部齿轮与所述齿轮组配合旋转形成的减速比与所述电机的输出端的减速机构的减速比相同。
8.优选地,所述电机封闭端还设有支撑板,所述支撑板水平固联在所述定子上,且与所述齿轮组的转轴转动连接。
9.优选地,所述位置感应装置与所述磁片的间距均为1mm。
10.优选地,所述位置感应装置的精度均相同。
11.优选地,所述位置感应装置与计算机相连接。
12.有益效果:
13.本实用新型提供一种机器人电机双重绝对位置编码装置,通过在电机封闭端的转子端部固装端部齿轮,端部齿轮与齿轮组形成减速机构,与电机输出端减速机构的减速比相同,且在端部齿轮及齿轮组末端齿轮上分别设置处于同一水平面的磁片,每个所述磁片上方均对应安装有相同精度的位置感应装置,且所述磁片与所述位置感应装置设有相同间隙,所述位置感应装置均与计算机相连,即通过双重绝对位置编码装置,能够精确获得当前电机输出端的绝对位置,无论开机时四足机器人或机械臂处于何种角度,电机均可输出当前输出端的绝对角度数据给机器人控制系统,彻底解决了机器人开机时动作错乱的问题。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
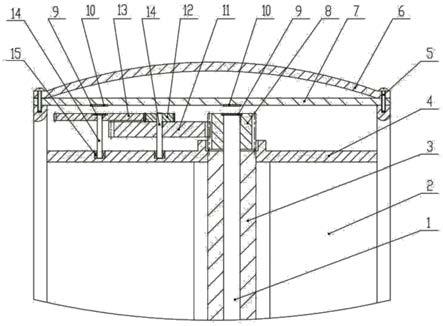
15.图1是本实用新型结构方案示意图;
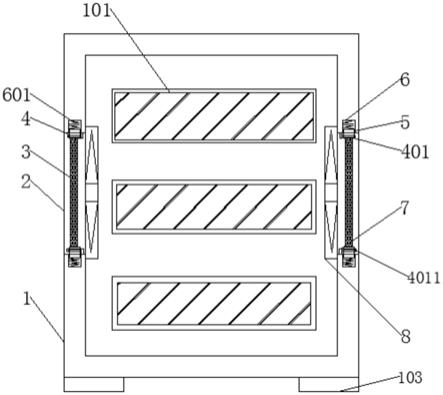
16.图2是本实用新型去掉上盖及电路板的轴侧结构示意图。
17.其中:
[0018]1‑
主转轴;2
‑
定子;3
‑
转子;4
‑
支撑板;5
‑
紧固螺钉;6
‑
上盖;7
‑
电路板;
[0019]8‑
端部齿轮;9
‑
磁片;10
‑
霍尔位置传感器;11
‑
齿轮一;12
‑
齿轮二;13
‑
齿轮三;14
‑
转轴;15
‑
轴承。
具体实施方式
[0020]
如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本技术的较佳实施方式,然所述描述乃以说明本技术的一般原则为目的,并非用以限定本技术的范围。本技术的保护范围当视所附权利要求所界定者为准。
[0021]
参照图1
‑
图2,本实用新型的一个实施例:
[0022]
一种机器人电机双重绝对位置编码装置,在电机的封闭端,包括电机的定子2和位于内部的转子3、齿轮减速机构、电路板7、封闭端的上盖6及计算机(图中未示出)。
[0023]
贯穿所述转子3中心线固装有主转轴1,所述转子3的端部固定安装端部齿轮8,所述端部齿轮8与齿轮组配合形成减速机构,所述齿轮组包括与所述端部齿轮8配合的齿轮一11,齿轮二12为与所述齿轮一11同轴的二级齿轮,所述齿轮二12与齿轮三13相配合,且在所述端部齿轮8的顶端、在所述齿轮三13的顶端均固定安装磁片9,且两所述磁片9在同一水平线上。
[0024]
优选地,在电机的封闭端安装的减速机构与与所述电机输出端减速机构的减速比相同。
[0025]
优选地,在所述减速机构的上部通过紧固螺钉5固定安装有电路板7,所述电路板7的内侧对应所述磁片9分别设有霍尔位置传感器10,且所述磁片9与所述霍尔位置传感器10
设有相同的间隙。
[0026]
优选地,所述霍尔位置传感器10与所述磁片的间距均为1mm。
[0027]
优选地,在所述电机封闭端的定子2内还设有支撑板4,所述支撑板4水平固定安装在所述定子2上,齿轮一11、齿轮二12的转轴14,齿轮三13的转轴14均通过轴承15转动安装在所述支撑板4上。
[0028]
优选地,两个所述霍尔位置传感器10的精度均相同。
[0029]
优选地,所述霍尔位置传感器10与计算机(图中未示出)相连接。
[0030]
所述电路板7上部通过紧固螺钉5安装有上盖6。
[0031]
本实用新型的另一个实施例:
[0032]
一种机器人电机双重绝对位置编码装置,在电机的封闭端,包括电机的定子2和位于内部的转子3、齿轮减速机构、电路板7、封闭端的上盖6及计算机(图中未示出)。
[0033]
贯穿所述转子3中心线固装有主转轴1,所述转子3的端部固定安装端部齿轮8,所述端部齿轮8与齿轮组配合形成减速机构,所述齿轮组包括与所述端部齿轮8配合的齿轮一11,齿轮二12为与所述齿轮一11同轴的二级齿轮,所述齿轮二12与齿轮三13相配合,且在所述端部齿轮8的顶端、在所述齿轮三13的顶端均固定安装磁片9,且两所述磁片9在同一水平线上。
[0034]
优选地,端部齿轮8与齿轮一11的齿数比为18:36,齿轮二12与齿轮三13的齿数比为12:36。
[0035]
优选地,在电机的封闭端安装的减速机构与与所述电机输出端减速机构的减速比相同。
[0036]
优选地,在所述减速机构的上部通过紧固螺钉5固定安装有电路板7,所述电路板7的内侧对应所述磁片9分别设有霍尔位置传感器10,且所述磁片9与所述霍尔位置传感器10设有相同的间隙。
[0037]
优选地,所述霍尔位置传感器10与所述磁片的间距均为1mm。
[0038]
优选地,在所述电机封闭端的定子2内还设有支撑板4,所述支撑板4水平固定安装在所述定子2上,齿轮一11、齿轮二12的转轴14,齿轮三13的转轴14均通过轴承15转动安装在所述支撑板4上。
[0039]
优选地,两个所述霍尔位置传感器10的精度均相同。
[0040]
优选地,所述霍尔位置传感器10与计算机(图中未示出)相连接。
[0041]
所述电路板7上部通过紧固螺钉5安装有上盖6。
[0042]
本实用新型的有益效果为:
[0043]
本实用新型提供一种机器人电机双重绝对位置编码装置,通过在电机封闭端的转子端部固装端部齿轮,端部齿轮与齿轮组形成减速机构,与电机输出端减速机构的减速比相同,且在端部齿轮及齿轮组末端齿轮上分别设置处于同一水平面的磁片,每个所述磁片上方均对应安装有相同精度的位置感应装置,且所述磁片与所述位置感应装置设有相同间隙,所述位置感应装置均与计算机相连,即通过双重绝对位置编码装置,能够精确获得当前电机输出端的绝对位置,无论开机时四足机器人或机械臂处于何种角度,电机均可输出当前输出端的绝对角度数据给机器人控制系统,彻底解决了机器人开机时动作错乱的问题。
[0044]
上述说明示出并描述了本技术的若干优选实施例,但如前所述,应当理解本技术
并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述申请构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本技术的精神和范围,则都应在本技术所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。