技术特征:
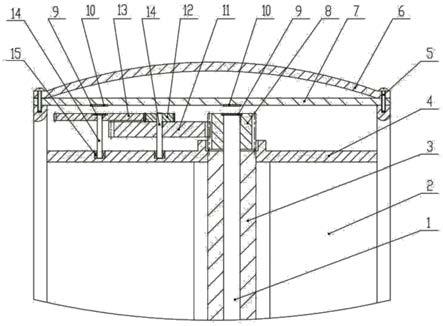
1.一种机器人电机双重绝对位置编码装置,包括电机的定子和转子,其特征在于,在电机封闭端的转子端部固装有端部齿轮,还设有与所述端部齿轮相配合形成减速机构的齿轮组,所述齿轮组的末端齿轮及所述端部齿轮的顶端均装有磁片,且所述磁片位于同一水平面,所述减速机构的上部设有电路板,所述电路板内侧对应所述磁片分别设有位置感应装置,且所述磁片与所述位置感应装置设有相同的间隙。2.根据权利要求1所述的机器人电机双重绝对位置编码装置,其特征在于,所述齿轮组设有与所述端部齿轮配合的齿轮一,与所述齿轮一同轴的齿轮二与齿轮三相配合,且所述端部齿轮与所述齿轮三的顶端均装有磁片。3.根据权利要求2所述的机器人电机双重绝对位置编码装置,其特征在于,所述端部齿轮与所述齿轮组配合旋转形成的减速比与所述电机的输出端的减速机构的减速比相同。4.根据权利要求3所述的机器人电机双重绝对位置编码装置,其特征在于,所述电机封闭端还设有支撑板,所述支撑板水平固联在所述定子上,且与所述齿轮组的转轴转动连接。5.根据权利要求4所述的机器人电机双重绝对位置编码装置,其特征在于,所述位置感应装置与所述磁片的间距均为1mm。6.根据权利要求5所述的机器人电机双重绝对位置编码装置,其特征在于,所述位置感应装置的精度均相同。7.根据权利要求6所述的机器人电机双重绝对位置编码装置,其特征在于,所述位置感应装置与计算机相连接。
技术总结
本实用新型涉及智能机器人技术领域,公开了一种机器人电机双重绝对位置编码装置,通过在电机封闭端的转子端部固装端部齿轮,端部齿轮与齿轮组形成减速机构,与电机输出端减速机构的减速比相同,且在端部齿轮及齿轮组末端齿轮上分别设置处于同一水平面的磁片,每个所述磁片上方均对应安装有相同精度的位置感应装置,且所述磁片与所述位置感应装置设有相同间隙,所述位置感应装置均与计算机相连,即通过双重绝对位置编码装置,能够精确获得当前电机输出端的绝对位置,无论开机时四足机器人或机械臂处于何种角度,电机均可输出当前输出端的绝对角度数据给机器人控制系统,彻底解决了机器人开机时动作错乱的问题。器人开机时动作错乱的问题。器人开机时动作错乱的问题。
技术研发人员:秦剑
受保护的技术使用者:北京比得机器人科技有限公司
技术研发日:2021.01.28
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。