技术特征:
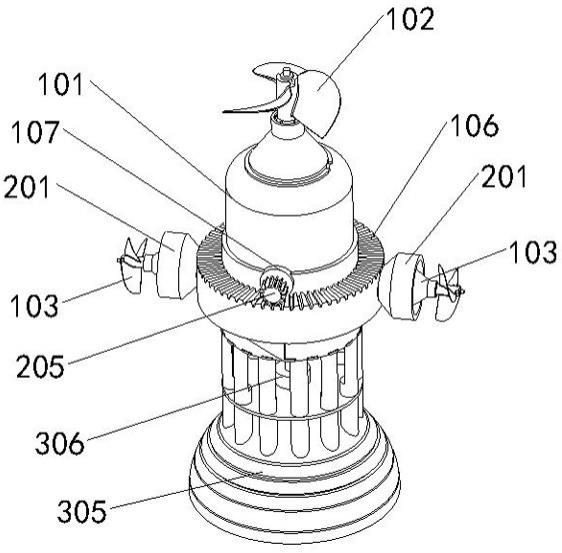
1.一种基于石墨烯电刷供电的水下机器人系统,包括机身以及安装在机身上的驱动组件,其特征在于:所述驱动组件包括第一驱动机构与第二驱动机构,所述第一驱动机构用于带动机器人上下游动,所述第二驱动机构用于带动机器人平移游动;所述第一驱动机构设置在所述机身的顶部,所述第一驱动机构包括第一螺旋桨以及用于带动所述第一螺旋桨旋转的第一电机;所述第二驱动机构包括圆形齿环以及用于带动圆形齿环转动的第二电机,所述机身的侧壁沿径向开设有两条弧形通槽,所述圆形齿环转动套设在所述机身的弧形通槽上,所述圆形齿环的侧边对称两个设置有两个安装孔,所述安装孔上固定安装有固定座,所述固定座上固定安装有第二螺旋桨以及用于带动所述第二螺旋桨转动的第三电机,且所述固定座的底部开设有圆形通孔,所述圆形通孔与所述弧形通槽连通;所述固定座的圆形通孔上安装有电刷机构,所述电刷机构包括石墨烯导电棒、弹簧、安装座,所述石墨烯导电棒的一端固定安装在所述安装座上,另一端穿过所述弧形通槽伸入至机身内部,所述弹簧的一端与所述安装座的底部固定连接,另一端抵持在所述第三电机的底部;所述机身内设置有电刷转向器,所述电刷转向器的边缘与所述石墨烯导电棒伸入机身内部一端的端部相贴合。2.根据权利要求1所述的一种基于石墨烯电刷供电的水下机器人系统,其特征在于:所述安装座与所述弹簧均能够沿所述圆形通孔的轴向方向滑动,所述石墨烯导电棒与所述第三电机通过可伸缩的第一导电探针电性连接,所述第三电机的底部还设置有压力传感器,所述压力传感器用于检测所述弹簧的压力信息。3.根据权利要求1所述的一种基于石墨烯电刷供电的水下机器人系统,其特征在于:所述第二电机的输出端配合连接有齿轮,所述齿轮能够与所述圆形齿环上的齿牙啮合传动,以使得第二电机能够带动圆形齿环沿机身的外壁转动。4.根据权利要求1所述的一种基于石墨烯电刷供电的水下机器人系统,其特征在于:所述机身内设置有供电电源,所述第一电机通过第二导电探针与所述供电电源电性连接,所述电刷转向器通过第三导电探针与所述供电电源电性连接。5.根据权利要求1所述的一种基于石墨烯电刷供电的水下机器人系统,其特征在于:所述机身的底部还配合连接有打捞机构,所述打捞机构能够对目标物进行打捞并储存,所述打捞机构的下方设置有探测机构,所述探测机构包括视觉相机、雷达探测仪、定位系统、激光探测仪的一种或多种组合。6.一种基于石墨烯电刷供电的水下机器人系统的目标搜寻方法,其特征在于,包括如下步骤:s1、获取目标物信息以及搜索区域位置信息,其中所述目标物信息包括目标物特征与目标物类型,不同目标物类型对应有不同目标物的检测神经网络模型,将所述搜索区域位置信息定义为搜索的节点;s2、执行蚁群算法,所述蚁群算法是指模拟蚂蚁寻找食物的过程,机器人通过该算法能够求出从原点出发,经过若干个节点后,最终返回原点的最短路径;s3、当机器人到达步骤s1得到的节点后,开启雷达探测仪,进入目标搜索阶段;
s4、对该节点的每个波位采用1判1检准则进行目标物检测,所述1判1检准则为在每个波位上仅停留1帧,若未检测到目标物,则直接进入下一波位进行搜索;若检测到目标物,则立即进入步骤s5;s5、采用3判2准则对该波位进行目标物检测,所述3判2准则为在每个搜索波位上停留3帧的时间,若3帧信号中,有2帧或3帧信号检测到目标物,则认为该波位上存在目标物,确认该目标物为真实存在,而非虚警,记录该目标物的坐标位置后,再返回步骤s4搜索下一波位,直至搜索完当前节点的所有波位后,进入步骤s6;s6、根据当前节点所有搜索到目标物的坐标位置,机器人逐一移动至每个目标物的坐标位置上,通过图像技术对目标物进行最终确认;s7、确认完毕后,对目标物进行打捞,然后移动到下一个节点进行搜索。7.根据权利要求6所述的一种基于石墨烯电刷供电的水下机器人系统的目标搜寻方法,其特征在于,根据当前节点所有搜索到目标物的坐标位置,机器人逐一移动至每个目标物的坐标位置上,还包括:获取当前机器人位置坐标,根据机器人当前位置坐标与每个搜索到的目标坐标生成多条路线信息,筛选出最优路线,机器人按照最优路线进行移动;实时采集机器人位置信息,将机器人位置信息与目标物位置信息进行比较,判断机器人与目标物之间的距离;将机器人与目标物之间的距离与预设距离进行比较,得到距离差值;判断距离差值是否大于或等于第一距离,若是,则生成第一移动方式,机器人按照第一移动方式进行移动;判断距离差值是否小于第一距离,若是,则生成第二移动方式,机器人按照第二移动方式进行移动。8.根据权利要求7所述的一种基于石墨烯电刷供电的水下机器人系统的目标搜寻方法,其特征在于:所述第一移动方式为机器人按照均加速方式运动,所述第二移动方式为机器人按照均减速方式运动。9.根据权利要求6所述的一种基于石墨烯电刷供电的水下机器人系统的目标搜寻方法,其特征在于,通过图像技术对目标物进行最终确认,还包括:启动视觉相机拍摄以获得目标物图像,对目标物图像进行预处理以生成检测图像;将检测图像输入到对应的目标物检测神经网络模型进行目标物检测,生成检测结果,其中所述检测图像包括多张不同分辨率、不同拍摄角度的目标物图像;经最终确认后,若是目标物,则通过打捞机构进行打捞;若不是目标物,则放弃打捞。10.根据权利要求6所述的一种基于石墨烯电刷供电的水下机器人系统的目标搜寻方法,其特征在于,根据当前节点所有搜索到目标物的坐标位置,机器人逐一移动至每个目标物的坐标位置上,还包括:在移动过程中实时采集机器人的位置信息,将机器人实时位置信息与预设位置信息进行比较,得到偏差率;判断所述偏差率是否大于预设偏差率阈值;若大于,则生成修正信息,根据修正信息对最优路线进行实时调整。
技术总结
本发明公开了一种基于石墨烯电刷驱动的水下机器人系统,一种基于石墨烯电刷供电的水下机器人系统,包括机身以及安装在机身上的驱动组件,所述驱动组件包括第一驱动机构与第二驱动机构,所述第一驱动机构用于带动机器人上下游动,所述第二驱动机构用于带动机器人平移游动,所述第一驱动机构设置在所述机身的顶部,所述第一驱动机构包括第一螺旋桨以及用于带动所述第一螺旋桨旋转的第一电机,通过石墨烯电刷供电的方式为第三电机供电,具有导电性能优良,磨损率低,运行平稳的优点,并且只需要在机身内安装一个供电电源即可,大大降低了机器人的重量与体积,具有更大的续航能力。具有更大的续航能力。具有更大的续航能力。
技术研发人员:刘鑫
受保护的技术使用者:单县多米石墨烯科技有限公司
技术研发日:2021.11.04
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。