1.本发明涉及全站仪扫描技术领域,具体而言,涉及一种基于全站仪的扫描方法、装置及系统。
背景技术:
2.钢结构在土木工程中应用广泛,其精度的控制要点不仅仅在加工和安装阶段,测量精度的控制同样非常重要。目前通常采取的做法是全站仪加自贴式反射片的测量方案,有时也采用三维激光扫描的方式。
3.三维激光扫描对于获取一定区域内的测量数据优势明显,所得通常为百万数量级以上的海量点云数据,应用在虚拟拼装对接时优势明显。但精度受环境亮度和距离的限制,且在扫描过程中要求仪器架设稳定,轻微的扰动会影响大量数据的精度。而且后期数据处理耗时较长,无法获得实时的读数。全站仪测量射程远,可以立时读取测量数据,对环境亮度要求不高,可以在夜间操作。但是测量标靶的入射角度对精度影响较大,当入射角大于30
°
时,测量误差明显增加,容易受到场地限制和临时措施的干扰。
技术实现要素:
4.本发明解决的问题是如何提高测量的高效性和精准性。
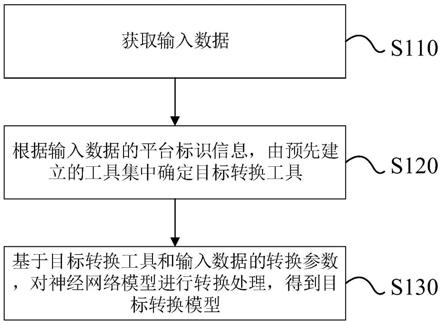
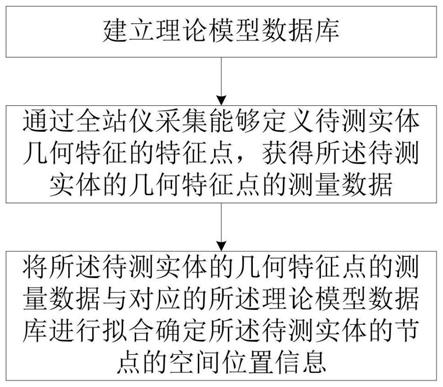
5.为解决上述问题,本发明提供一种基于全站仪的扫描方法,包括:建立理论模型数据库;通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据;将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息。
6.本发明所述的基于全站仪的扫描方法,通过建立理论模型数据库并利用全站仪采集能够定义待测实体几何特征的特征点,将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息,兼具全站仪测量的高效和三维激光扫描的精准,且能够保障测量的时效性,大大提高了控制测量的效率,进而提高了施工效率。
7.可选地,所述建立理论模型数据库包括:将标定物体分解为多个标定平面和/或标定曲面和/或标定线段;确定所述标定平面和/或标定曲面和/或标定线段的方程以及相邻面之间交线的方程,根据多个所述方程确定方程组;将所述方程组录入excel表格以建立所述理论模型数据库。
8.本发明所述的基于全站仪的扫描方法,通过建立理论模型数据库,进而能够将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息,兼具全站仪测量的高效和三维激光扫描的精准,且能够保障测量的时效性,大大提高了控制测量的效率,进而提高了施工效率。
9.可选地,所述通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据包括:将所述待测实体分解为多个待测平面和/或待测曲
面,在多个所述待测平面和/或所述待测曲面上测量多个能够定义所述待测平面和/或所述待测曲面几何特征的特征点,形成微点云;通过全站仪测量所述微点云获得所述待测实体的几何特征点的测量数据。
10.本发明所述的基于全站仪的扫描方法,通过对微点云的测量完成对待测实体的测量,得到待测实体的几何特征点的测量数据。
11.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息包括:通过最小二乘法将对应的所述理论模型数据库拟合到所述待测实体的几何特征点的测量数据中,以确定所述待测实体的节点的空间位置信息。
12.本发明所述的基于全站仪的扫描方法,通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点测量数据中,以确定待测实体的节点的空间位置信息,有效保证了拟合的准确性。
13.可选地,所述通过最小二乘法将对应的所述理论模型数据库拟合到所述待测实体的几何特征点的测量数据中包括:根据最小二乘法确定所述理论模型数据库中与所述待测实体的几何特征点的测量数据误差最小的数据,将所述误差最小的数据对应的空间位置信息确定为所述待测实体的节点的空间位置信息。
14.本发明所述的基于全站仪的扫描方法,通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点的测量数据中,以确定待测实体的节点的空间位置信息,有效保证了拟合的准确性。
15.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定与所述待测实体的节点的空间位置信息还包括:根据实时温度对所述待测实体的几何特征点的测量数据进行修正。
16.本发明所述的基于全站仪的扫描方法,根据实时温度对几何特征点的测量数据进行修正,有效提高几何特征点的测量数据的准确性。
17.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定与所述待测实体的节点的空间位置信息还包括:将所述待测实体的多个待测平面和/或待测曲面的几何特征点的测量数据分别与对应的所述理论模型数据库的平面和/或曲面进行拟合。
18.本发明所述的基于全站仪的扫描方法,将待测实体的多个待测平面和/或待测曲面的几何特征点的测量数据分别与对应的理论模型数据库的平面和/或曲面进行拟合,起到了平差的作用,提高了空间位置测量数据的准确性。
19.本发明还提供一种基于全站仪的扫描装置,包括:建模模块,用于建立理论模型数据库;扫描模块,用于通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据;拟合模块,用于将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息。所述基于全站仪的扫描装置与上述基于全站仪的扫描方法相对于现有技术所具有的优势相同,在此不再赘述。
20.本发明还提供一种基于全站仪的扫描系统,包括存储有计算机程序的计算机可读存储介质和处理器,所述计算机程序被所述处理器读取并运行时,实现如上所述的基于全
站仪的扫描方法。所述基于全站仪的扫描系统与上述基于全站仪的扫描方法相对于现有技术所具有的优势相同,在此不再赘述。
21.本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如上所述的基于全站仪的扫描方法。所述计算机可读存储介质与上述基于全站仪的扫描方法相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
22.图1为本发明实施例的基于全站仪的扫描方法的流程示意图;
23.图2为本发明实施例的压环节点的平面与柱面的示意图;
24.图3为本发明实施例的压环节点的测量点的示意图。
具体实施方式
25.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
26.如图1所示,本发明实施例提供一种基于全站仪的扫描方法,包括:建立理论模型数据库;通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据;将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息。
27.具体地,在本实施例中,基于全站仪的扫描方法包括:
28.建立理论模型数据库,例如钢结构的施工设计模型,或根据钢构件的实际加工尺寸,对构件模型进行修正后,将构件模型函数化,编写进excel表格,完成模型数据库的建立。至此,理论模型数据库就建立完成。其中,理论模型数据库指的是通过对构件模型的函数化和编程等方式从而建立的静态模型数据库,理论模型数据库是通过测量标定物体并进行数据分析而来的,由此在测量具体物体时,可以将理论模型数据库中对应的数据模型用来拟合以确定具体物体的节点信息。
29.将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息,几何特征点的测量数据也就是实测空间三维坐标数据,即将理论模型数据库中的信息利用最小二乘法拟合到实测空间三维坐标数据中,从而达到反求实物节点或待测目标点空间三维坐标的目的,实现化繁为简及数据分析模块化。
30.本实施例中结合三维激光扫描仪的点云的工作原理,提出全站仪扫描法,兼具全站仪测量的高效和三维激光扫描的精准。通过测量整个节点上几何特征点来推导目标点位的坐标,有效解决了全站仪测量入射角的限制以及孔洞中心无法直接测量的问题。全站仪扫描法前期需要做的工作较多,包括对实际加工的构件的精度的复核、对模型的函数化和编程等等,但当程序编撰完成后,只需要将数据库中指定的模型与实时监控数据进行拟合从而反求出实测数据的节点信息就能完成扫描,能够保障测量的时效性,大大提高了数据处理的效率,基本能够做到实时反馈。
31.其中,构件实际加工的精度可能影响全站仪扫描法精度,由于测量数据是用设计模型进行拟合的,如果构件的加工精度与设计模型偏差较大,则会影响拟合的精度。可以通
过对实际加工的构件进行精确测量建模,使用实测模型进行拟合,来消除误差。
32.其中,一个复杂的大型结构可以被分割成若干个待测节点实体。分割的原则需要参考结构的几何特征,温度场影响最小化等。
33.在本实施例中,通过建立理论模型数据库并利用全站仪采集能够定义待测实体几何特征的特征点,将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息,兼具全站仪测量的高效和三维激光扫描的精准,且能够保障测量的时效性,大大提高了控制测量的效率,进而提高了施工效率。
34.可选地,所述建立理论模型数据库包括:将标定物体分解为多个标定平面和/或标定曲面和/或标定线段;确定所述标定平面和/或标定曲面和/或标定线段的方程以及相邻面之间交线的方程,根据多个所述方程确定曲面方程组;将所述曲面方程组录入excel表格以建立所述理论模型数据库。
35.具体地,在本实施例中,建立理论模型数据库包括:
36.将标定物体分解为多个标定平面和/或标定曲面和/或标定线段;确定标定平面和/或标定曲面和/或标定线段的方程以及相邻面之间交线的方程,根据多个方程确定方程组,用来表示物体的三维形态;将方程组录入excel表格以建立理论模型数据库。任何物体的外表面都可以被拆解成若干个标定平面和标定曲面,钢构件一般为了便于加工,都是由比较规则的几何形状构成。结合图2所示,所有构件均为直管和板。这就为钢构件外表面函数化提供了便利。以主索耳板所在的压环节点为例,整个节点的设计模型可以拆分为4个柱面和6个平面,几个面域之间存在一定的几何关系。
37.平面方程为一次曲面方程,可表示为:
38.z=ax by c
ꢀꢀꢀ
(1)
39.每个平面方程有一组三个系数a、b、c。
40.柱面方程为二次曲面方程,可表示为:
41.z=dx2 exy fy2 gx hy i
ꢀꢀꢀꢀ
(2)
42.每个柱面有一组六个系数d、e、f、g、h、i。相邻两个面之间存在一条交线,这条交线上的点同时满足这两个面的曲面方程。由此可以推导出每组系数之间的数学关系,并得到一个曲面方程组,用来表达该节点的三维形态。
43.建立理论模型数据库后,可以在标定物体各个标定平面和/或标定曲面和/或标定线段上选取能够定义该标定平面和/或标定曲面和/或标定线段的几何特征点。结合图3所示,通过全站仪测量几何特征点“微点云”,将所得测量数据根据所在标定平面和/或标定曲面和/或标定线段分组记录。由于此步骤可以随机在标定平面和/或标定曲面和/或标定线段选取测量点,因此选点可以集中在入射角满足精度要求的区域。以测量耳板为例,所有耳板都正对着场心,因此只需将全站仪架设在场心,就可以同时测量所有的耳板。当全站仪架设在场心时,仰视压环,因此在耳板节点的下半区选取测量点能够保证入射角在30
°
以内。
44.将几何控制点“微点云”与理论模型拟合后,通过最小二乘法将所测“微点云”与设计模型拟合,将设计模型投射到实测位置。将理论模型的节点或特征点视为标定物体的节点或特征点,以确定标定物体的空间位置。
45.对于平面的拟合,给定测量数据点(x
j
,y
j
,z
j
)j=1,2,
…
,n,求作一平面方程(1)使
总误差为最小。
46.对于柱面的拟合,给定测量数据点(x
k
,y
k
,z
k
)k=1,2,
…
,n,求作二次曲面方程(2)使误差使误差最小。同时根据每套系数之间的数学关系,联立方程组,求得最优解,以建立标定物体的理论模型数据库。
47.其中,拟合指的是实测几何特征点的空间三维坐标数据与理论模型之间的拟合,理论模型里面的节点或特征点就是物体的节点或特征点,例如通过曲线拟合的方式确定标定数据的方程曲线。
48.在本实施例中,通过建立理论模型数据库,进而能够将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息,兼具全站仪测量的高效和三维激光扫描的精准,且能够保障测量的时效性,大大提高了控制测量的效率,进而提高了施工效率。
49.可选地,所述通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据包括:将所述待测实体分解为多个待测平面和/或待测曲面,在多个所述待测平面和/或所述待测曲面上测量多个能够定义所述待测平面和/或所述待测曲面几何特征的特征点,形成微点云;通过全站仪测量所述微点云获得所述待测实体的几何特征点的测量数据。
50.具体地,在本实施例中,通过全站仪采集能够定义待测实体几何特征的特征点的过程与建立模型数据库时对标定物体的扫描过程类似,将待测实体分解为多个待测平面和/或待测曲面,在多个待测平面和/或待测曲面上测量多个几何特征点形成“微点云”;通过全站仪测量待测几何特征点“微点云”以完成对待测实体的测量,得到待测实体的几何特征点的测量数据,达到三维扫描的效果。
51.其中,待测实体的几何特征点测量数据指的是在多个待测平面和/或待测曲面上测量多个几何特征点形成“微点云”的三维空间坐标。
52.在本实施例中,通过对微点云的测量完成对待测实体的测量,得到待测实体的几何特征点的测量数据。
53.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息包括:通过最小二乘法将对应的所述理论模型数据库拟合到所述待测实体的几何特征点的测量数据中,以确定所述待测实体的节点的空间位置信息。
54.具体地,在本实施例中,将待测实体的几何特征点的测量数据与对应的模型数据库进行拟合确定待测实体的节点的空间位置信息包括:通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点的测量数据中,以确定待测实体的节点的空间位置信息,进而能够达到三维扫描的效果。通过最小二乘法进行拟合,就可以认为理论模型里面的节点或特征点的空间坐标就是待测实体的节点或特征点的空间坐标。
55.在本实施例中,通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点的测量数据中,以确定待测实体的节点的空间位置信息,有效保证了拟合的准确性。
56.可选地,所述通过最小二乘法将对应的所述理论模型数据库拟合到所述待测实体
的几何特征点的测量数据中包括:根据最小二乘法确定所述理论模型数据库中与所述实体的几何特征点的测量数据误差最小的数据,将所述误差最小的数据对应的空间位置信息确定为所述待测实体的节点的空间位置信息。
57.具体地,在本实施例中,通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点的测量数据中包括:根据最小二乘法确定理论模型数据库中与几何特征点的测量数据误差最小的数据,将误差最小的数据对应的待测实体的空间位置信息确定为待测实体的节点的空间位置信息。最小二乘法通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小,从而能够确保拟合后的节点信息的准确性。
58.在本实施例中,通过最小二乘法将对应的理论模型数据库拟合到待测实体的几何特征点的测量数据中,以确定待测实体的节点的空间位置信息,有效保证了拟合的准确性。
59.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息还包括:根据实时温度对所述待测实体的几何特征点的测量数据进行修正。
60.具体地,在本实施例中,将待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息还包括:根据实时温度对待测实体的几何特征点的测量数据进行修正,即引入温度变形的函数,根据实时温度对空间位置测量数据进行修正,有效提高空间位置测量数据的准确性。由于温度存在热胀冷缩等效应,因此对应不同温度,几何特征点测量数据都会有所不同,因此需要对几何特征点测量数据进行修订,以将实时温度下的几何特征点测量数据换算到一个标准温度下的几何特征点测量数据。
61.在本实施例中,根据实时温度对几何特征点的测量数据进行修正,有效提高几何特征点的测量数据的准确性。
62.可选地,所述将所述待测实体的几何特征点的测量数据与对应的所述理论模型数据库进行拟合确定与所述待测实体的节点的空间位置信息还包括:将所述待测实体的多个待测平面和/或待测曲面的几何特征点的测量数据分别与对应的所述理论模型数据库的平面和/或曲面进行拟合。
63.具体地,在本实施例中,将几何特征点的测量数据与对应的理论模型数据库进行拟合确定待测实体的节点的空间位置信息还包括:将多组待测实体的几何特征点的测量数据与对应的理论模型数据库进行拟合,起到了平差的作用,提高了空间位置测量数据的准确性。例如任一组几何特征点测量数据与模型数据库中该组几何特征点所在平面/或曲面/或直线方程拟合,确定一组方程系数,使得该组方程系数总误差最小,确定最终的拟合结果。
64.在本实施例中,将待测实体的多个待测平面和/或待测曲面的几何特征点的测量数据分别与对应的理论模型数据库的平面和/或曲面进行拟合,起到了平差的作用,提高了空间位置测量数据的准确性。
65.本发明另一实施例提供一种基于全站仪的扫描装置,包括:建模模块,用于建立理论模型数据库;扫描模块,用于通过全站仪采集能够定义待测实体几何特征的特征点,获得所述待测实体的几何特征点的测量数据;拟合模块,用于将所述待测实体的几何特征点的
测量数据与对应的所述理论模型数据库进行拟合确定所述待测实体的节点的空间位置信息。
66.本发明另一实施例提供一种基于全站仪的扫描系统,包括存储有计算机程序的计算机可读存储介质和处理器,所述计算机程序被所述处理器读取并运行时,实现如上所述的基于全站仪的扫描方法。
67.本发明另一实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如上所述的基于全站仪的扫描方法。
68.虽然本发明公开披露如上,但本发明公开的保护范围并非仅限于此。本领域技术人员在不脱离本发明公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。