一种基于himawari
‑
8遥感影像的时空火点探测方法
技术领域
1.本发明涉及遥感科学技术领域,具体说是一种基于himawari
‑
8遥感影像的时空火点探测方法。
背景技术:
2.火灾是突发性强、破坏性大且难以控制的灾害事件,快速准确的检测火点对于火灾应急管理至关重要。中分辨率成像光谱仪(moderate
‑
resolution imaging spectroradiometer,modis) 和可见光红外成像辐射仪(visible infrared imaging radiometer,viirs)等遥感数据具有易获取、大幅宽等优势,故而成为火点探测的主要遥感数据源之一。然而,它们的时间分辨率较低,因此无法对火点进行快速、实时地检测。himawari
‑
8作为新一代静止气象卫星(表1),能够实现对地连续观测,具有高频次、大幅宽等特性,在火点检测中具有明显优势。
3.4.表1
5.传统的火点探测算法侧重单一的时间信息或空间信息。基于时间信息的火点探测算法通常利用地球静止轨道卫星提供的高频次观测数据,通过分析亮温的多时相变化探测火点。基于空间信息的火点探测算法大致分为固定阈值法和上下文法。其中,固定阈值法难以适应不同火灾场景;上下文法的原理为比较火点候选像元与背景像元间的亮温差以判断真实火点,其中背景像元的亮温由火点候选像元周边像元的平均亮温计算而得,该方法基于周边像元与火点候选像元的下垫面类型和植被覆盖度相同的假设,但不同区域像元的下垫面类型或植被覆盖度差异较大从而对背景亮温的估算造成一定影响。然而,利用单一时间信息或空间信息进行火点探测具有一定的局限性。针对传统的火点探测算法中存在的时空信息利用不充分等问题,本发明通过挖掘火灾的时间与空间特征,充分利用遥感影像的时间信息和空间信息,提出了一种基于多时相himawari
‑
8遥感影像的时空火点探测方法,可有效提高火点探测精度。
技术实现要素:
6.(一)要解决的技术问题
7.本发明提出了一种基于多时相himawari
‑
8遥感影像的时空火点探测方法,充分考虑了遥感影像的时间信息和空间信息,通过开展多时相遥感影像的时空信息相结合提高火点探测精度。
8.(二)技术方案
9.本发明至少包含以下步骤:
10.(1)获取目标时刻t覆盖研究区域的himawari
‑
8遥感影像f,以及相同位置t时刻前一小时内的6景himawari
‑
8遥感影像n
i
,i=1,2,...,6,并分别对上述七幅影像进行几何校正、通道选取、影像裁剪预处理,得到预处理后的影像f1和n
i
,i=1,2,...,6;
11.其中,himawari
‑
8遥感影像的级别为l2级,格式为netcdf,通道选取需要选himawari
‑
8 遥感影像中0.64μm、0.86μm、2.3μm、3.9μm、11.2μm及12.4μm六个通道。
12.(2)分别提取f1与n
i
中的云像元,若像元满足以下任一条件,则提取为云像元;
13.其中,具体条件如下:
[0014][0015]
式中,ρ
0.64
表示0.64μm通道中像元的表观反射率,ρ
0.86
表示0.86μm通道中像元的表观反射率,&表示逻辑“与”运算,t
12.4
表示12.4μm通道中像元的亮温值。
[0016]
(3)分别提取f1与n
i
中的水像元,若像元在2.3μm通道的表观反射率ρ
2.3
小于0.05,则提取为水像元。
[0017]
(4)分别提取f1与n
i
中的耀斑像元,若像元的可见光波段及红外波段的反射率均大于 0.3且耀斑角小于30
°
,则提取该像元为耀斑像元。
[0018]
(5)利用步骤(2)、(3)、(4)提取的f1与n
i
中的云像元、水像元和耀斑像元,分别将其制作成掩膜文件,并利用所得掩膜文件对f1与n
i
分别进行影像的云、水、耀斑的去除,得
到处理后的影像f2与g
i
,i=1,2,...,6。
[0019]
(6)根据步骤(5)所得的g
i
,计算t时刻前一小时内的研究区亮温均值差利用拟合出t时刻f2与前一时刻g6间的研究区亮温均值差
[0020]
(7)生成f2与g6各像元间的亮温差影像以步骤(6)所得为阈值,判断中各像元的属性,若像元值大于则判定该像元为变化像元,反之,判定其为非火点像元。
[0021]
其中,生成亮温差影像时,若f2与g6中的掩膜区域不一致,则直接将f2较g6掩膜不一致的像元判定为变化像元。
[0022]
(8)根据筛选条件,确定潜在火点,具体条件如下:
[0023][0024]
式中,t
3.9
,δt
3.9
分别为f2中变化像元3.9μm通道的亮温值,亮温均值及标准差, t
3.9
‑
11.2
,δt
3.9
‑
11.2
分别为f2中变化像元3.9μm和11.2μm通道的亮温差,亮温差对应的亮温均值和标准差。
[0025]
(9)计算f2中变化像元与g6中相应像元3.9μm通道的亮温差根据筛选条件,确定持续火点,具体条件如下:
[0026][0027]
式中,为g6中相应像元3.9μm通道的亮温值。
[0028]
(10)将步骤(8)得到的潜在火点与步骤(9)得到的持续火点合并,得到最终的火点探测结果。
[0029]
进一步,所述步骤(6)中多项式拟合的方法为:
[0030]
在g
i
,i=1,2,...,6中各取相同位置的100个特征点,计算g
i
间的亮温均值差利用拟合出f2与g6间的亮温均值差
[0031]
其中,亮温均值差公式为:
[0032][0033]
式中,为g
j
中特征点k的亮温值,为g
j 1
中特征点k的亮温值,为g
j 1
与g
j
间的亮温均值差;
[0034]
利用点集拟合温度差函数,根据二元一次方程f(x)=a bx,将五个点集分别带入该二元一次方程,得到如下:
[0035][0036]
为使等式两边的方差最小,可得s(a,b)。
[0037][0038]
对s(a,b)求偏导数,并使一阶导数的值分别等于0,即可求得上述二元一次方程组中a,b的值。因此,在上述五个点集中,通过最小二乘法得到直线方程:f(x)=a bx,将x=6输入直线方程f(x)=a bx,即可得到
[0039]
(三)有益效果
[0040]
由于单一地利用遥感影像的时间信息或空间信息,误检漏检现象严重,具有一定的局限性。本发明以多时相himawari
‑
8遥感影像探测火点,充分利用了遥感影像的时间信息和空间信息以提高火点探测精度。具有较强的可操作性与实用性,对及时发现火点信息具有重要意义。
附图说明:
[0041]
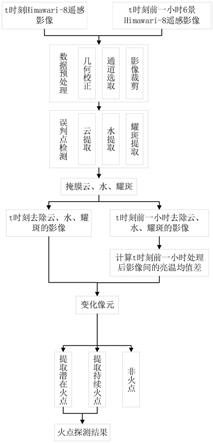
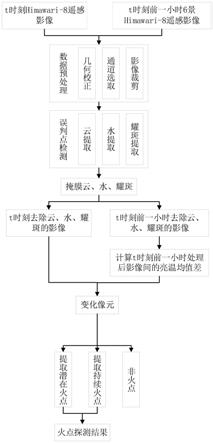
图1为本发明实施的步骤流程图。
[0042]
具体实施方法:
[0043]
为使本发明的目的、内容、和优点更加清楚,下面结合附图,对本发明的具体实施方式作一步详细描述:
[0044]
参照图1,本发明的具体实施步骤为:
[0045]
(1)获取目标时刻t覆盖研究区域的himawari
‑
8遥感影像f,以及相同位置t时刻前一小时内的6景himawari
‑
8遥感影像n
i
,i=1,2,...,6,并分别对上述七幅影像进行几何校正、通道选取、影像裁剪预处理,得到预处理后的影像f1和n
i
,i=1,2,...,6;
[0046]
其中,himawari
‑
8遥感影像的级别为l2级,格式为netcdf,通道选取需要选himawari
‑
8 遥感影像中0.64μm、0.86μm、2.3μm、3.9μm、11.2μm及12.4μm六个通道。
[0047]
(2)分别提取f1与n
i
中的云像元,若像元满足以下任一条件,则提取为云像元;
[0048]
其中,具体条件如下:
[0049][0050]
式中,ρ
0.64
表示0.64μm通道中像元的表观反射率,ρ
0.86
表示0.86μm通道中像元的表观反射率,&表示逻辑“与”运算,t
12.4
表示12.4μm通道的亮温值。
[0051]
(3)分别提取f1与n
i
中的水像元,若像元在2.3μm通道的表观反射率ρ
2.3
小于0.05,则提取为水像元。
[0052]
(4)分别提取f1与n
i
中的耀斑像元,若像元的可见光波段及红外波段的反射率均大于 0.3且耀斑角小于30
°
,则提取该像元为耀斑像元。
[0053]
(5)利用步骤(2)、(3)、(4)提取的f1与n
i
中的云像元、水像元和耀斑像元,分别将其制作成掩膜文件,并利用所得掩膜文件对f1与n
i
分别进行影像的云、水、耀斑的去除,得到处理后的影像f2与g
i
,i=1,2,...,6。
[0054]
(6)根据步骤(5)所得的g
i
,计算t时刻前一小时内的研究区亮温均值差利用拟合出t时刻f2与前一时刻g6间的研究区亮温均值差
[0055]
其中,亮温均值差公式为:
[0056][0057]
式中,为g
j
中特征点k的亮温值,为g
j 1
中特征点k的亮温值,为g
j 1
与g
j
间的亮温均值差。
[0058]
利用点集拟合温度差函数,根据二元一次方程f(x)=a bx,将五个点集分别带入该二元一次方程,得到如下:
[0059][0060]
为使等式两边的方差最小,可得s(a,b)。
[0061][0062]
对s(a,b)求偏导数,并使一阶导数的值分别等于0,即可求得上述二元一次方程组中a,b的值。因此,在上述五个点集中,通过最小二乘法得到直线方程:f(x)=a bx,将x=6输入直线方程f(x)=a bx,即可得到
[0063]
(7)生成f2与g6各像元间的亮温差影像以步骤(6)所得为阈值,判断中各像元的属性,若像元值大于则判定该像元为变化像元,反之,判定其为非火点像元。
[0064]
其中,生成亮温差影像时,若f2与g6中的掩膜区域不一致,则直接将f2较g6掩膜不一致的像元判定为变化像元。
[0065]
(8)根据筛选条件,确定潜在火点,具体条件如下:
[0066][0067]
式中,t
3.9
,δt
3.9
分别为f2中变化像元3.9μm通道的亮温值,亮温均值及标准差,t
3.9
‑
11.2
,δt
3.9
‑
11.2
分别为f2中变化像元3.9μm和11.2μm通道的亮温差,亮温差对应的亮温均值和标准差。
[0068]
(9)计算f2中变化像元与g6中相应像元3.9μm通道的亮温差根据筛选条件,确定持续火点,具体条件如下:
[0069][0070]
式中,为g6中相应像元3.9μm通道的亮温值。
[0071]
(10)将步骤(8)得到的潜在火点与步骤(9)得到的持续火点合并,得到最终的火点探测结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。