技术特征:
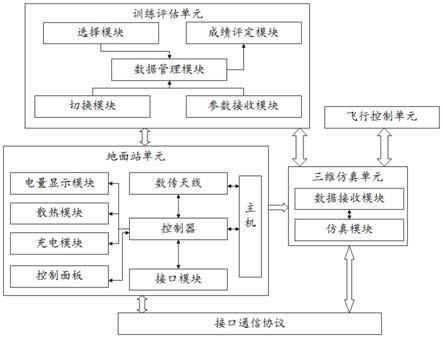
1.一种无人机模拟训练系统,其特征在于,包括:三维仿真单元、地面站单元和训练评估单元;所述三维仿真单元用于根据所述地面站单元输入的无人机飞行控制数据进行飞行模拟,并在智能显示模块显示航线、第一视角、第三视角及三维模拟环境;所述地面站单元用于操控训练人员输入飞行控制指令和飞行参数、并对遥测数据、飞行航迹和控制指令指令发送状态进行管理;所述训练评估单元用于通过互通的网络协议接收所述三维仿真单元虚拟无人机飞行参数,并依据设置的科目和场景参数,实现不同仿真环境下的飞行训练,并对其进行记录和数据回放,读取训练操作数据以评定训练操作成绩。2.如权利要求1所述的无人机模拟训练系统,其特征在于,所述三维仿真单元包括仿真模块,所述仿真模块接收遥控指令改变无人机的飞行姿态,并依托flightgear2018平台利用飞机的气动参数、翼型参数、动力参数建立飞机的方程和控制律建立数学模型,以时间为坐标模拟产生飞机的飞行姿态和飞行距离参数,采用数学仿真的方法仿真出飞控计算机、导航计算机、飞机动力、气动系统和舵机设备。3.如权利要求2所述的无人机模拟训练系统,其特征在于,所述三维仿真单元还包括数据接收模块,所述数据接收模块用于接收输入的飞行交互指令和设置的参数,所述飞行交互指令包括飞行速度、姿态和高度,所述设置的参数包括航点信息和模拟环境参数信息。4.如权利要求3所述的无人机模拟训练系统,其特征在于,所述地面站单元包括控制器、接口模块、控制面板、数传天线、主机和充电模块;所述控制面板包括摇杆模块、第一智能交互模块和多组控制按钮,所述摇杆模块包括速度和方向控制摇杆和飞行姿态控制摇杆,速度和方向控制摇杆上下拨动为控制油门即控制速度快慢,左右拨动为控制方向,所述飞行姿态控制摇杆上下拨动为控制机身俯仰,左右为控制机身测滚,所述第一智能交互模块用于输入飞行控制指令、航线规划指令和显示遥测数据、飞行航迹和控制指令指令发送状态,所述第一智能交互模块输入航线规划指令包括简单航线规划和自动航线规划,所述多组控制按钮包括电源按钮、开机按钮、加锁/解锁按钮、手动按钮、自动按钮、自定义按钮和返航按钮,所述摇杆模块、所述第一智能交互模块和所述多组控制按钮均与所述控制器相连接;所述接口模块包括hdmi高清接口、usb3.0接口和网络接口,所述接口模块和所述控制器均与所述主机相连接,所述主机与所述三维仿真单元相连接用于通过接口协议将飞控参数与仿真模块的虚拟无人机结合;所述充电模块用于为所述地面站单元进行充电。5.如权利要求4所述的无人机模拟训练系统,其特征在于,所述地面站单元还包括电量显示模块和散热模块,电量显示模块用于显示地面指挥单元的剩余电量,所述电量显示模块包括电量显示器,所述散热模块包括一对散热风扇,所述一对散热风扇与所述控制器电连接,当系统温度超过设置的温度阈值时,所述控制器控制一对散热风扇转动散热。6.如权利要求5所述的无人机模拟训练系统,其特征在于,所述训练评估单元包括选择模块、切换模块、数据管理模块和参数接收模块;所述选择模块用于选择不同的虚拟无人机机型和训练科目,并启动对应机型的视景;所述切换模块用于根据所述飞行控制单元发送的状态切换信号进行自动模式和手动
模式切换,在控制台的第二智能交互模块显示当前状态的模式,在手动模式状态下时,模型接受遥感数据驱动;当在自动模式状态下时,模型接受地面站发送的数据驱动飞行;所述数据管理模块用于记录和更新飞行数据、进行数据回放及监控飞行数据,所述数据管理模块包括存储数据库、记录控制模块、数据监管模块和初始化模块,所述存储数据库用于按照存储列表存储模型飞行中的数据,所述记录控制模块包括记录数据/结束记录按钮和存储选择模块,控制记录数据/结束记录按钮,系统开始记录飞行数据,此时操控训练人员开始操作飞机飞行,需要结束记录数据是,再次控制记录数据/结束记录按钮,当需要保存该条数据时,操控训练人员通过所述存储选择模块输入该条数据的名称即可保存,若不输入名称,将保存为默认的数据名称,当不需要保存该条数据时操控训练人员通过所述存储选择模块选择取消保存,所述数据监管模块用于根据数据回放指令进行数据回放和根据数据删除指令对记录数据进行删除及对虚拟无人机的偏航角、滚转角、航向角和高度进行监控并通过所述第二智能交互模块指示空速的数据曲线,所述初始化模块用于对数据和视景进行初始化;所述参数接收模块用于通过所述第二智能交互模块接收操控训练人员输入的初始化指令、数据记录更新指令、数据回放指令和模拟风速及风向的指令。7.如权利要求4所述的无人机模拟训练系统,其特征在于,还包括飞行控制单元,所述飞行控制单元与所述训练评估单元相连接,所述飞行控制单元包括垂飞旋钮、暂停开关、操控杆和多组控制开关,所述垂飞旋钮和所述暂停开关均与所述控制器相连接,当视景启动并完成初始化后,推动所述暂停开关启动模型时钟,操控训练人员通过旋转垂飞旋钮使飞机垂直起飞,当高度达到要求时,可将垂飞旋钮旋转至零位,所述多组控制开关包括机型选择开关、视景启动开关、初始化开关、科目选择开关、记录数据/结束记录开关、数据回放/结束回放开关、手动/自动切换开关。8.如权利要求6所述的无人机模拟训练系统,其特征在于,所述训练评估单元还包括成绩评定模块,所述成绩评定模块读取的飞行操作数据,根据设定的评分规则,对所述飞行操作数据进行比较判断获取训练成绩。
技术总结
本发明提供了一种无人机模拟训练系统,包括:三维仿真单元、地面站单元和训练评估单元;所述三维仿真单元用于根据所述地面站单元输入的无人机飞行控制数据进行飞行模拟,并在智能显示模块显示航线、第一视角、第三视角及三维模拟环境;所述地面站单元用于操控训练人员输入飞行控制指令和飞行参数、并对遥测数据、飞行航迹和控制指令指令发送状态进行管理;所述训练评估单元用于接收所述三维仿真单元虚拟无人机飞行参数,并依据设置的科目和场景参数,实现不同仿真环境下的飞行训练,并对其进行记录和数据回放,读取训练操作数据以评定训练操作成绩,本发明可有效地辅助无人机操控人员进行多模式、多场景训练且扩展性好。多场景训练且扩展性好。多场景训练且扩展性好。
技术研发人员:卢凡 卢思成 孙建峰 金一晖 熊强盛
受保护的技术使用者:海创飞龙(福建)科技有限公司
技术研发日:2021.08.10
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。