1.本发明属于智能优化技术领域,涉及一种面向智能计算的群智能进化式优化方法。
背景技术:
2.近年来,国内外出现了很多各具优点的群智能优化算法,但随着这些优化方法与科学技术、工程应用的快速发展和深度融合,新机制、新方法、新思路、新应用乃至新问题都在不断被提出,呈现出百花齐放、仍需继续探究的繁荣局面,许多问题都有进一步研究的空间,许多算法也存在着求解不够稳定,有时寻优精度不高,收敛速度较慢,易陷入局部极值、维度适应性不佳等问题。为此,本发明提出并公开了一种面向智能计算的群智能进化式优化方法,用于求解复杂函数极值优化问题和工程设计约束优化问题。在求解复杂函数优化方面,主要是通过将本方法所构建的算法对ieee cec基准测试函数集进行优化求解。由于cec测试集包含了不同类型并具有旋转、偏移、混合、组合等特性的大量复杂优化问题测试函数,因此,其求解难度非常大且具有问题广泛性,在评价各类智能优化算法时,相对客观和公正,是验证本方法有效性的有利佐证之一。在求解约束优化问题方面,主要是通过将本方法所构建的算法用于求解不同类型的工程设计约束优化问题,以进一步客观、公正地检验本方法的有效性。
技术实现要素:
3.优化问题的规模越来越大、复杂程度越来越高,传统优化方法难以在合理时间内给出有效解。元启发式群智能优化算法是解决这类问题最有效的方法之一,但相关算法也普遍存在着求解不够稳定,有时寻优精度不高,收敛速度较慢,易陷入局部极值、维度适应性不佳等缺点。本发明的目的在于提供一种面向智能计算的群智能进化式优化方法,以此为机制,用于构建新的或改进已有的元启发式智能优化算法,以解决上述这些问题。
4.本发明所采用的技术方案是,一种面向智能计算的群智能进化式优化方法,具体按照以下步骤实施:
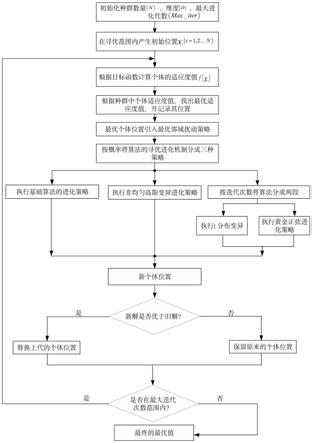
5.步骤1、设置初始参数:种群中个体数量n、最大迭代次数max_iter、个体维度d,并在寻优范围内随机生成每个个体的初始位置x
i
,i=1,2,3
……
n;
6.步骤2、根据目标函数f(x)计算个体的适应度值f(x
i
);
7.步骤3、根据步骤2所得适应度值f(x
i
),找出最优适应度值f
min
,并记录最优适应度值f
min
的位置,即最优个体位置x
best
(t);
8.步骤4、对种群中的最优个体位置进行邻域扰动,生成邻域个体位置,并计算新旧最优个体的适应度值,采用贪婪选择策略对新旧解进行对比,得到新的最优个体位置;
9.步骤5、在保持种群规模不变的情况下,按概率将算法的寻优进化机制分成三种策略:
10.a、1/3概率的个体执行基础算法的进化策略;
11.b、1/3个体执行非均匀高斯变异进化策略;
12.c、其余1/3个体再按迭代次数将算法分成两段:前半段执行t分布变异,后半段执行黄金正弦进化策略;
13.通过三种策略得到原个体位置对应的新个体位置;
14.步骤6、根据目标函数f(x)求出由步骤5所得新个体位置的适应度值,采用贪婪选择策略对原个体位置与新个体位置的适应度值进行选择,得到个体现位置;
15.步骤7、比较当前迭代次数t是否达到最大迭代次数,若t≤max_iter,返回步骤2,继续迭代进化的寻优过程;
16.步骤8、确定最终的最优值并输出。
17.本发明的特点还在于:
18.步骤4包括以下步骤:
19.步骤4.1、对步骤3所得最优个体位置x
beat
(t)进行邻域扰动,生成邻域个体位置,计算邻域个体位置的适应度值;
20.步骤4.2、采用贪婪选择策略对最优个体位置x
best
(t)与邻域个体位置的适应度值进行选择,得到最优个体位置。
21.步骤4.1的计算式如下:
[0022][0023]
式(1)中,rand为[0,1]之间均匀分布的随机数,x
best
(t)为当前代最优个体位置。
[0024]
步骤4.2的计算式如下:
[0025][0026]
式(2)中,x
best
(t 1)为更新后下一代最优个体位置,即个体现位置。
[0027]
步骤5包括以下实施步骤:
[0028]
步骤5.1、m=rand;
[0029]
步骤5.2、若m<1/3,则执行基础算法的进化策略
[0030]
步骤5.3、若m>2/3,由公式(3)对个体的位置进行更新
;
[0031]
x
i
(t 1)=x
i
(t) δ(t,g
i
(t))
ꢀꢀꢀ
(3)
[0032]
步骤5.4、若1/3≤m≤2/3,则判断算法是在迭代前半段进行探索还是在迭代后半段执行开发,若t<1/2
·
max_iter,则由公式(4)对个体的位置进行更新;
[0033]
x
i
(t 1)=x
i
(t) tmd(t)
·
x
i
(t)
ꢀꢀꢀ
(4)
[0034]
否则,由公式(5)对个体的位置进行更新;
[0035]
x
i
(t 1)=x
i
(t)
·
|sin(r1)| r2·
sin(r1)
·
|x1·
x
best
(t)
‑
x2·
x
i
(t)|
ꢀꢀꢀ
(5)
[0036]
式(5)中,r1为[0,2π]之间均匀分布的随机数,用于决定下一次迭代中个体的移动距离;r2为[0,π]之间均匀分布的随机数,用于决定下一次迭代第i个个体的更新方向;x1和x2是黄金分割系数,黄金分割数则x1=
‑
π (1
‑
q)
·
2π,x2=
‑
π q
·
2π,max_iter为
最大迭代次数,x
i
(t)是当前代中第i个个体的位置,x
i
(t 1)是更新后下一代中第i个个体的位置;
[0037]
式(3)中,δ(t,g
i
(t))为非均匀变异步长,是一种通过高斯分布自适应调节步长的变异算子,δ(t,g
i
(t))计算式如下:
[0038][0039]
g
i
(t)=n
·
((x
bext
(t)
‑
x
i
(t)),σ)
ꢀꢀꢀ
(7)
[0040]
式(6)~(7)中,y=g
i
(t),p为[0,1]之间均匀分布的随机数,max_iter为最大迭代次数,b为系统系数,决定变异计算的非均匀程度,b=2,n为种群个体数量,σ为高斯分布标准差。
[0041]
本发明的有益效果是:
[0042]
1、本发明通过采用最优邻域扰动策略和包含了非均匀高斯变异、t分布变异、黄金正弦进化策略等机制的基于分段思想的差异学习策略构建智能优化算法或对已有算法进行改进,算法的寻优精度、收敛速度和适应性均有明显提升。
[0043]
2、本发明将构建或改进的算法应用在求解ieee cec基准函数测试套件以及工程设计约束优化问题上,实验结果表明,算法的寻优能力有明显的优越性和有效性,且本方法实现简单,没有增加算法的时间复杂度,不会造成运行缓慢的问题。
附图说明
[0044]
图1是本发明一种面向智能计算的群智能进化式优化方法的流程图。
具体实施方式
[0045]
下面结合附图和具体实施方式对本发明进行详细说明。
[0046]
本发明一种面向智能计算的群智能进化式优化方法,如图1所示,具体按照以下步骤实施:
[0047]
步骤1、设置初始参数:种群中个体数量n、最大迭代次数max_iter、个体维度d,并在寻优范围内随机生成每个个体的初始位置x
i
(i=1,2,...,n);
[0048]
步骤2、根据目标函数f(x)计算个体的适应度值f(x
i
);
[0049]
步骤3、根据步骤2所得的种群中个体的适应度值f(x
i
);找出最优适应度值f
min
,并记录所述最优适应度值f
min
的位置,即最优个体位置x
best
(t);
[0050]
步骤4、对种群中的最优个体位置进行邻域扰动,生成邻域个体位置,并计算新旧最优个体的适应度值,采用贪婪选择策略对新旧解进行对比,若新解较优,则替换原来的最优个体位置;否则保留原来的最优个体位置得到新的最优个体位置;
[0051]
步骤5、在保持种群规模不变的情况下,按概率将算法的寻优进化机制分成三种策略:
[0052]
a、1/3概率的个体执行基础算法的进化策略;
[0053]
b、1/3个体执行非均匀高斯变异进化策略;
[0054]
c、其余1/3个体再按迭代次数将算法分成两段:前半段执行t分布变异,后半段执
行黄金正弦进化策略;
[0055]
通过三种策略得到原个体位置对应的新个体位置,即由旧解产生新解;
[0056]
步骤6、根据目标函数f(x)求出由步骤5所得新个体的适应度值,采用贪婪选择策略对原个体位置与新个体的适应度值进行选择,并对新旧解进行对比,若新解较优,则用新个体替换上代的个体位置;否则保留原来的个体位置,得到个体现位置;
[0057]
步骤7、比较当前迭代次数t是否达到最大迭代次数,若t≤max_iter,返回步骤2,继续迭代进化的寻优过程;
[0058]
步骤8、确定最终的最优值并输出。
[0059]
由于大多数基础性智能优化算法都以当前最优个体位置作为本次迭代的目标,在整个迭代过程中,最优个体位置只有在优于原来的最优个体位置时才会进行更新,因此,最优个体总的更新次数往往较少,尤其在迭代中后期更是如此,致使算法寻优效率不高。为此,本发明在步骤4中引入最优邻域扰动策略来解决这一问题,该策略是在最优个体位置附近随机生成邻域个体位置,采用“贪婪选择”策略对新旧解进行对比,若新解较优,则替换原来的最优个体位置,否则保留原来的最优个体位置。这不仅可以提升算法的收敛速度,而且还能提高算法跳出局部极值区域的概率。步骤4具体按照步骤实施:
[0060]
步骤4.1、对步骤3所得种群中的最优个体位置x
best
(t)进行邻域扰动,生成邻域个体位置,计算所述邻域个体位置的适应度值;
[0061]
步骤4.2、采用贪婪选择策略对最优个体位置x
best
(t)与邻域个体位置的适应度值进行选择,得到最优个体位置。
[0062]
所述步骤4.1的计算式如下:
[0063][0064]
式(1)中,rand为[0,1]之间均匀分布的随机数,x
best
(t)为当前代最优个体位置。
[0065]
步骤4.2的计算式如下:
[0066][0067]
式(2)中,x
best
(t 1)为更新后下一代最优个体位置,即个体现位置。
[0068]
对于一些复杂多极值优化问题,多数基础性元启发式智能优化算法都存在着前期全局搜索不够充分容易陷入局部极值,而后期在最优解附近局部精细挖掘能力不强导致寻优精度不高的问题。为此,本方法在步骤5中概率性引入基于分段思想的差异学习策略来解决这一问题,以平衡元启发式智能优化算法的全局探索和局部挖掘能力,进一步提高算法的寻优精度和收敛性能。步骤5包括以下实施步骤:
[0069]
步骤5.1、m=rand;
[0070]
步骤5.2、若m<1/3,则执行基础算法的进化策略
[0071]
步骤5.3、若m>2/3,由公式(3)对个体的位置进行更新;
[0072]
x
i
(t 1)=x
i
(t) δ(t,g
i
(t))
ꢀꢀꢀ
(3)
[0073]
步骤5.4、若1/3≤m≤2/3,则判断算法是在迭代前半段进行探索还是在迭代后半
cec基准函数测试套件以及工程设计约束优化问题上,实验结果表明,算法的寻优能力有明显的优越性和有效性,且本方法实现简单,没有增加算法的时间复杂度,不会造成运行缓慢的问题。
[0089]
采用本方法对基本jaya、粒子群和萤火虫等智能优化算法进行改进,并将改进后的算法应用在求解ieee cec基准函数测试套件及三杆桁架、拉伸弹簧、悬臂梁、焊接梁、压力容器、减速机和齿轮系统等具有不同求解难度的工程设计约束优化问题上,实验结果清楚地表明,改进后算法的寻优能力和求解结果都有显著提升,与多个代表性对比算法相比具有明显优势。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。