1.本技术涉及水下目标识别和追踪技术领域,尤其涉及一种舰船被动辐射 噪声数值仿真方法和装置及设备。
背景技术:
2.目标辐射噪声即为被动声纳系统的声源。通过对舰船被动辐射噪声进行 仿真,为被动目标识别和追踪提供了有效参考。在相关技术中,舰船被动辐 射噪声数值仿真大多只关注螺旋桨叶片的低频线谱,结构单一,不能体现出 目标运动产生的多普勒效应,这就使得仿真出来的结果较为单一,完整度较 低。
技术实现要素:
3.有鉴于此,本技术提出了一种舰船被动辐射噪声数值仿真方法,可以有 效提高仿真结果的完整度,从而提高仿真结果的精确度。
4.根据本技术的一方面,提供了一种舰船被动辐射噪声数值仿真方法,包 括:
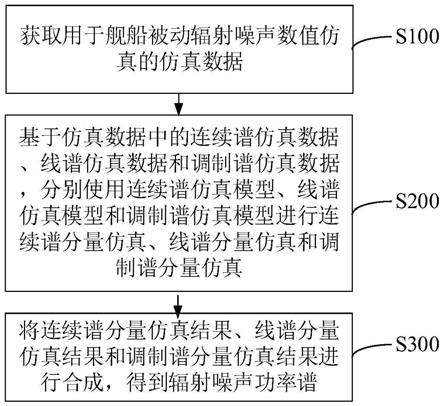
5.获取用于舰船被动辐射噪声数值仿真的仿真数据;
6.基于所述仿真数据中的连续谱仿真数据、线谱仿真数据和调制谱仿真数 据,分别使用连续谱仿真模型、线谱仿真模型和调制谱仿真模型进行连续谱 分量仿真、线谱分量仿真和调制谱分量仿真;
7.将连续谱分量仿真结果、线谱分量仿真结果和调制谱分量仿真结果进行 合成,得到辐射噪声功率谱。
8.在一种可能的实现方式中,获取用于舰船被动辐射噪声数值仿真的仿真 数据时,基于用户所选择的仿真模式进行;
9.其中,所述仿真模式包括经验模式和实测模式中的至少一种。
10.在一种可能的实现方式中,基于用户所选择的仿真模式获取所述仿真数 据时,包括:
11.判断当前用户选择的仿真模式是否为经验模式;
12.在所述仿真模式为经验模式时,由目标参数库中调取相应的目标参数作 为所述仿真数据;
13.在所述仿真模式为实测模式时,获取输入的实测数据并以所述实测数据 作为所述仿真数据。
14.在一种可能的实现方式中,基于所述仿真数据中的连续谱仿真数据,使 用连续谱仿真模型进行连续谱分量仿真时,所述连续谱仿真数据包括:噪声 谱转折频率、声源级、转折频率前倍频程斜率、转折后倍频程斜率和分析带 宽中的至少一种;
15.其中,所述声源级基于所述连续谱仿真模型获取,所述连续谱仿真模型 基于当前进行仿真的目标类型进行确定。
16.在一种可能的实现方式中,基于所述仿真数据中的线谱仿真数据,使用 线谱仿真
模型进行线谱分量仿真时,所述线谱仿真模型如下所示:
17.f
m
=mns;
18.其中,f
m
是叶片速率线谱的第m次谐波,单位为hz;n是舰船的螺旋桨 叶片数;s是舰船的螺旋桨转速,单位为转/秒。
19.在一种可能的实现方式中,基于所述仿真数据中的调制谱仿真数据,使 用调制谱仿真模型进行调制谱分量仿真时,所述调制谱仿真模型如下所示:
[0020][0021]
其中,t
m
为第m号螺旋桨转动周期,的上标m表示桨数,下标r表 示叶片数,的上标m表示第m号螺旋桨。和为第m号螺旋 桨的第r片叶片在不均匀尾流场中转动一周时,激发的叶片辐射脉冲形状函 数和脉冲幅值函数。
[0022][0023]
在一种可能的实现方式中,将连续谱分量仿真结果、线谱分量仿真结果 和调制谱分量仿真结果进行合成后,还包括:对合成得到的所述辐射噪声功 率谱进行连续谱级插值处理的步骤。
[0024]
在一种可能的实现方式中,对合成得到的所述辐射噪声功率谱进行连续 谱级插值处理时,使用三次样条插值法进行。
[0025]
根据本技术的另一方面,还提供了一种舰船被动辐射噪声数值仿真装置, 包括:数据获取模块、噪声仿真模块和仿真合成模块;
[0026]
所述数据获取模块,被配置为获取用于舰船被动辐射噪声数值仿真的仿 真数据;
[0027]
所述噪声仿真模块,被配置为基于所述仿真数据中的连续谱仿真数据、 线谱仿真数据和调制谱仿真数据,分别使用连续谱仿真模型、线谱仿真模型 和调制谱仿真模型进行连续谱分量仿真、线谱分量仿真和调制谱分量仿真;
[0028]
所述仿真合成模块,被配置为将连续谱分量仿真结果、线谱分量仿真结 果和调制谱分量仿真结果进行合成,得到辐射噪声功率谱。
[0029]
根据本技术的另一方面,还提供了一种舰船被动辐射噪声数值仿真设备, 包括:
[0030]
处理器;
[0031]
用于存储处理器可执行指令的存储器;
[0032]
其中,所述处理器被配置为执行所述可执行指令时实现前面任一所述的 方法。
[0033]
通过在获取到用于被动辐射噪声数值仿真的仿真数据后,根据仿真数据 中的连续谱仿真数据、线谱仿真数据和调制谱仿真数据分别进行连续谱仿真、 线谱仿真和调制谱仿真,然后再将连续谱仿真结果、线谱仿真结果和调制谱 仿真结果进行合成来得到舰船被动辐射噪声数值仿真的辐射噪声功率谱,相 较于相关技术中只关注螺旋桨叶片的低频线谱的方式,有效丰富了舰船被动 辐射噪声数值仿真的仿真结果,使得仿真结果更加完整,进而也就有效提高 了被动辐射噪声数值仿真结果的准确性。
[0034]
根据下面参考附图对示例性实施例的详细说明,本技术的其它特征及方 面将变得清楚。
附图说明
[0035]
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了 本技术的示例性实施例、特征和方面,并且用于解释本技术的原理。
[0036]
图1示出本技术实施例的舰船被动辐射噪声数值仿真方法的流程图;
[0037]
图2示出本技术实施例的舰船被动辐射噪声数值仿真方法的另一流程图;
[0038]
图3示出本技术实施例的舰船被动辐射噪声数值仿真方法中进行连续谱 分量仿真时所依据的潜艇辐射噪声连续谱的曲线图。
[0039]
图4示出本技术实施例的舰船被动辐射噪声数值仿真方法中进行连续谱 分量仿真过程中所使用的辐射声源级计算模型的示意图;
[0040]
图5示出本技术实施例的舰船被动辐射噪声数值仿真装置的结构框图;
[0041]
图6示出本技术实施例的舰船被动辐射噪声数值仿真设备的结构框图。
具体实施方式
[0042]
以下将参考附图详细说明本技术的各种示例性实施例、特征和方面。附 图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施 例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0043]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为
ꢀ“
示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
[0044]
另外,为了更好的说明本技术,在下文的具体实施方式中给出了众多的 具体细节。本领域技术人员应当理解,没有某些具体细节,本技术同样可以 实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路 未作详细描述,以便于凸显本技术的主旨。
[0045]
图1示出根据本技术一实施例的舰船被动辐射噪声数值仿真方法的流程 图。如图1所示,该方法包括:步骤s100,获取用于舰船被动辐射噪声数值 仿真的仿真数据。此处,需要说明的是,所获取的仿真数据可以为实测数据, 也可以为由目标参数库中调用的预先存储的目标参数。然后,再通过步骤 s200,基于仿真数据中的连续谱仿真数据、线谱仿真数据和调制谱仿真数据, 分别使用连续谱仿真模型、线谱仿真模型和调制谱仿真模型进行连续谱分量 仿真、线谱分量仿真和调制谱分量仿真。在分别通过连续谱仿真,线谱仿真 和调制谱仿真后,再通过步骤s500,将连续谱分量仿真结果、线谱分量仿真 结果和调制谱分量仿真结果进行合成,得到辐射噪声功率谱。
[0046]
由此,本技术实施例的舰船被动辐射噪声数值仿真方法,通过在获取到 用于被动辐射噪声数值仿真的仿真数据后,根据仿真数据中的连续谱仿真数 据、线谱仿真数据和调制谱仿真数据分别进行连续谱仿真、线谱仿真和调制 谱仿真,然后再将连续谱仿真结果、线谱仿真结果和调制谱仿真结果进行合 成来得到舰船被动辐射噪声数值仿真的辐射噪声功率谱,相较于相关技术中 只关注螺旋桨叶片的低频线谱的方式,有效丰富了舰船被动辐射噪声数值仿 真的仿真结果,使得仿真结果更加完整,进而也就有效提高了被动辐射噪声 数值仿真结果的准确性。
[0047]
其中,在本技术实施例的舰船被动辐射噪声数值仿真方法中,在获取用 于舰船被动辐射噪声数值仿真的仿真数据时,可以基于用户所选择的仿真模 式来进行。
[0048]
具体的,仿真模式可以包括经验模式和实测模式中的至少一种。经验模 式指的是,利用经验模型进行仿真。实测模式则指的是利用实际检测的数据 进行仿真。也就是说,在使用经验模式获取仿真数据时,仿真数据不需要当 前进行实时检测,而是由预先存储的目标参数库中直接调用相应的目标参数 即可。使用实测模式获取仿真数据时,仿真数据则需要通过当前实际检测来 获取。通过设置上述两种仿真模式,使得在进行舰船被动辐射噪声数值仿真 时,能够灵活选择当前最适合的仿真模式,这也就有效提高了舰船被动辐射 噪声数值仿真的灵活性和多样性。
[0049]
其中,基于用户所选择的仿真模式获取仿真数据时,可以通过以下方式 来实现。
[0050]
参阅图2,首先,通过步骤s001,判断当前用户选择的仿真模式是否为 经验模式。如果判断出当前所选择的仿真模式为经验模式时,则通过步骤 s110,由目标参数库中调取相应的目标参数作为仿真数据。在判断出当前所 选择的仿真模式不是经验模式时,则表明当前所选择的仿真模式为实测模式, 因此直接读取所输入的实测数据,以实测数据作为仿真数据。
[0051]
另外,还需要说明的是,在本技术实施例的方法中,在上述实施例中, 通过步骤s110,由目标参数库中调取相应的目标参数作为仿真数据之前,还 需要通过步骤s011,获取当前进行仿真的目标类型。即,在由目标参数库中 调取目标参数时,先确定当前要进行仿真的目标类型,然后再基于所确定的 目标类型调取相应的目标参数,使得在调取目标参数时能够更加准确。
[0052]
其中,应当指出的是,目标类型包括水面舰艇、潜艇、商船、渔船和鱼 雷中的任意一种。不同的目标类型所调取的目标参数不同。
[0053]
此外,在使用经验模式进行被动辐射噪声数值仿真的过程中,通过步骤 s110,由目标参数库中调取相应的目标参数之后,在仿真之前还可以通过步 骤s120,对调取的目标参数进行修改,进而再基于修改后的目标参数通过步 骤s200,分别进行连续谱分量的仿真、线谱分量的仿真以及调制谱分量的仿 真。
[0054]
进一步的,在本技术实施例的方法中,通过步骤s200,基于仿真数据中 的连续谱仿真数据、线谱仿真数据和调制谱仿真数据,分别使用连续谱仿真 模型、线谱仿真模型和调制谱仿真模型进行连续谱分量仿真、线谱分量仿真 和调制谱分量仿真时,可以通过以下方式来实现。
[0055]
首先,对于连续谱分量的仿真,由于空化噪声是由大量的气泡破裂引起 的,是由随机小脉冲构成的,所以空化噪声有连续谱,它是潜艇螺旋桨辐射 噪声连续谱的最主要成分。如图3所示,空化噪声在高频段的谱级随频率以 大约6db/倍频程斜率下降,在低频段噪声谱级以6~12db/倍频程的速率增加。 潜艇空化噪声谱中有一个峰值,对于潜艇来说,这个峰值通常位于 100~1000hz内,且峰值随航速的增加向低频方向移动。
[0056]
在噪声谱转折频率、转折频率谱级、转折频率前倍频程斜率和转折后倍 频程斜率已知情况下,可以据此得到声纳分析带宽[f
l
,f
h
]的下限频率f
l
对应 的辐射噪声谱级i0,在辐射噪声谱非平坦情况下,可以在全部声纳分析带宽 内对声强进行积分得到带宽总声强。以声强在每个倍频程上减少6db为例, 在分析带宽[f
l
,f
h
]内的总声强为:
[0057][0058]
故此可以按照声源级计算公式得到分析带宽内辐射噪声连续谱分量。即, 在一种可能的实现方式中,进行连续谱分量的仿真时,所使用的仿真数据包 括噪声谱转折频率、声源级、转折频率前倍频程斜率、转折后倍频程斜率和 分析带宽中的至少一种。即,在使用经验模式进行连续谱分量的仿真时,目 标参数可以为噪声谱转折频率、声源级、转折频率前倍频程斜率、转折后倍 频程斜率和分析带宽中的至少一种。同理,对于实测模式,所使用的实测数 据也可以为噪声谱转折频率、声源级、转折频率前倍频程斜率、转折后倍频 程斜率和分析带宽中的至少一种。
[0059]
同时,还需要指出的是,不同的目标类型对应的声源级计算公式有所不 同。具体的,对于舰船噪声声源级的计算,ross根据测量资料统计,得出适 用于100
‑
10khz的舰船辐射噪声声源级经验公式:
[0060]
对于30000吨以下舰船:
[0061][0062][0063]
其中,v代表航速(节),t代表吨位(吨),参考声压为1μpa。
[0064]
对于30000吨以上舰船:
[0065][0066]
ross和mccormick认为,对于旋转叶片的空化来说,有代表性的局部流 速是叶梢速度,即:
[0067]
u=πnd;
[0068]
其中,d为螺旋桨直径大小。
[0069]
上式指出,螺旋桨空化噪声功率,应当与发生空化的叶片总数和螺旋桨 直径成正比,而且是叶梢速度的函数。对于大型船只,除螺旋桨叶片数和直 径的乘积较大以外,船只的大小和吨位不体现在公式里。对于长度超过100 米的船只(战斗舰和航空母舰),在叶梢速度从15m/s到50m/s的范围内,噪 声数据可用下式表示:
[0070][0071]
其中,b为螺旋桨叶片数。一般来说,战斗舰和航空母舰用上式要好些, 它们声压级较高的原因在于有大量的空化叶片(8~12片)。
[0072]
在urick的水声原理一书中,有大量大船数据拟合而来的经验公式:
[0073]
sl=51logu 15logt
‑
20logf 20logd
‑
13.5;
[0074]
其中,u代表螺旋桨叶梢速度(英尺/秒);t代表舰船排水量(吨);f 表示频率(khz);d表示距离(码)。
[0075]
该式根据11种不同类型的77艘舰船的157个航次(大部分是货船、油船 和大型军舰)得到的,但仅在螺旋桨空化是主要噪声源的1000hz以上频率才 适用。在螺旋桨叶片速
度未知时,可使用由船速求声源级更为方便的公式:
[0076]
sl=60logv 9logt
‑
20logf 20logd 35;
[0077]
其中,v是以节为单位的舰船前进速度,这个公式和客船、运输船、军 舰在5000hz的测量级相符,有5.5db的标准方差,但不适用于货船和油船。
[0078]
几种典型舰船的总声源级如下表1所示:
[0079]
表1典型的舰船总声源级
[0080][0081][0082]
由此,根据以上所述,不同的目标类型所对应的声源级计算经验公式如 表2所示:
[0083]
表2舰船噪声经验公式统计表
[0084][0085]
将上述所示的目标类型与对应的声源级计算经验公式的映射关系存储至数 据库中,在进行不同目标类型的被动辐射噪声数值仿真时,直接根据当前所 进行仿真的目标类型,基于上述映射关系得到相应的声源级数据后,再结合 所获取到的噪声谱转折频率、转折频率前倍频程斜率、转折后倍频程斜率和 分析带宽进行连续谱分量的仿真。
[0086]
其中,需要说明的是,sl广义表征声源级,在声纳被动探测中,目标辐 射噪声即为声源;在连续谱仿真中,谱级表征的是一定带宽的sl大小。
[0087]
在一种可能的实现方式中,根据噪声谱转折频率、声源级、转折频率前 倍频程斜率、转折后倍频程斜率和分析带宽进行连续谱仿真的过程具体如下:
[0088]
参照图4,得到噪声谱转折频率f
t
、转折频率谱级sl
t
、转折频率前倍频 程斜率a1(正值)和转折后倍频程斜率a2(负值),另外还有声纳参数中设置的 分析带宽[f
l
,f
h
]。其中,f
l
为分析带宽中的最低带宽,f
h
为分析带宽中的最 高带宽。
[0089]
首先,计算噪声谱转折频率f
t
对应的声强:
[0090][0091]
其中,该公式中的sl
t
为根据目标类型所确定的声源级。
[0092]
然后,计算前倍频程斜率对应的计算因子κ1和后倍频程斜率对应的计算 因子κ2:
[0093]
[0094]
接着,对应前倍频程斜率和后倍频程斜率计算转折频率处声强的频率修 正值:
[0095][0096]
进而,再对噪声谱转折频率f
t
进行以下判断及计算:
[0097]
若f
h
≤f
t
,计算f
l
对应的声强:计算分析带宽[f
l
,f
h
]内的总声 强:
[0098]
若f
l
≥f
t
,计算f
l
对应的声强:计算分析带宽[f
l
,f
h
]内的总声 强:
[0099]
若f
l
<f
t
且f
h
>f
t
,计算f
l
对应的声强:计算分析带宽[f
l
,f
t
]内 的总声强:计算分析带宽[f
t
,f
h
]内的总声强:计算分析带宽[f
l
,f
h
]内的总声强:i
t
=i
t1
i
t2
。
[0100]
最后,再计算分析带宽内的目标噪声宽带谱级,即可得到连续谱分量的 仿真结果:sl=10lg
10
i
t
。
[0101]
进一步的,对于线谱分量的仿真,所使用的线谱仿真模型如下所示:
[0102]
f
m
=mns;
[0103]
其中,f
m
是叶片速率线谱的第m次谐波,单位为hz;n是舰船的螺旋桨 叶片数;s是舰船的螺旋桨转速,单位为转/秒。
[0104]
即,功率谱中的线谱反映了噪声信号中的周期性噪声部分的能量分布, 多分布于1000hz以下,而且不同舰船的线谱频率和幅度并不相同。对于线谱 分量,一种是频率较高的叶片共振,另一种是频率较低的“叶片速率”谱,它 是由螺旋桨叶片切割所有进入螺旋桨及其周围的不规则流动引起的,一般比 周围连续谱高10~25db,这些线谱带有明显的目标识别特征信息,是舰船噪 声的重要成分。
[0105]
由此,在本技术实施例的方法中,在进行线谱分量的仿真时,则只需要 获取当前所进行仿真的螺旋桨叶片数n和螺旋桨转速s,再按照上述公式进行 仿真即可。其中,在使用经验模式进行线谱分量的仿真时,目标参数还包括 螺旋桨叶片数n和螺旋桨转速s。同理,对于实测模式下线谱分量的仿真,实 测数据同样可以包括螺旋桨叶片数n和螺旋桨转速s。
[0106]
还需要指出的是,在实际应用中,在通过上述公式完成线谱分量的仿真 之后,还
可以使用不同周期的正弦信号来产生不同的线谱分量时域波形,即:
[0107][0108]
其中,m为线谱数,a
i
、f
i
、分别为第m条线谱对应的幅度、频率和 相位。
[0109]
更进一步的,螺旋桨空化噪声是舰船的主要噪声源之一。螺旋桨节拍对 其辐射的空化噪声有明显的振幅调制作用,使得目标空化噪声具有丰富的周 期性调制信息。其中,舰船辐射噪声的轴频及其谐波具有较大的功率,会对 高频段的舰船辐射噪声形成调制。调制的频率主要对应于螺旋桨的叶频、轴 频及谐波,在宽带检测经过不同频带的滤波,在进行检波分析可以得到不同 节奏特点的振幅调制。对调制包络做谱分析可以得到包络谱,其中包含了丰 富的线谱结构。
[0110]
由此,对于调制谱分量的仿真,在一种可能的实现方式中,所使用的调 制谱仿真模型如下所示:
[0111][0112]
其中,t
m
为第m号螺旋桨转动周期,的上标m表示桨数,下标r表 示叶片数,的上标m表示第m号螺旋桨。和为第m号螺旋 桨的第r片叶片在不均匀尾流场中转动一周时,激发的叶片辐射脉冲形状函 数和脉冲幅值函数。
[0113]
同时,在实际应用中,还可以将调制包络谱(即,仿真得到的调制谱分 量结果)作为具有随机幅度、同样形状、相同重复周期的脉冲性随机过程来 处理,其中单个脉冲μ
ξ
(t)的形状取为高斯型:
[0114][0115]
其中,ξ为脉冲幅度;σ表示脉冲宽度的参数。
[0116]
σ=t/(bd);
[0117]
其中,t表示螺旋桨旋转周期;b为叶片数;d为节拍之间间隔,取值 越大,节拍越清晰。
[0118]
在通过以上所述任一方式分别得到连续谱分量仿真结果、线谱分量仿真 结果和调制谱分量仿真结果之后,即可将所得到的连续谱分量仿真结果、线 谱分量仿真结果和调制谱分量仿真结果进行合成,得到所仿真的目标的被动 辐射噪声功率谱。此处,需要说明的是,将连续谱分量仿真结果、线谱分量 仿真结果和调制谱分量仿真结果进行合成时,可以采用本领域常规的频谱合 成技术手段,此处不再进行赘述。
[0119]
更进一步的,在本技术实施例中,通过上述任一所述的方式得到舰船被 动辐射噪声数值仿真结果(即,被动辐射噪声功率谱)之后,还包括对合成 得到的辐射噪声功率谱进行连续谱级插值处理的步骤。
[0120]
其中,在一种可能的实现方式中,对合成得到的辐射噪声功率谱进行连 续谱级插
值处理时,可以使用三次样条插值法进行。
[0121]
具体的,为了便于理解,首先对高次多项式插值拟合曲线的原理进行说 明。
[0122]
高次多项式插值拟合曲线原理如下:
[0123]
设在区间[a,b]上给定n 1个点x
i
,i=0,1,...,n有a≤x0<...<x
n
≤b,其对应函 数值y
i
=f(x
i
),i=0,1,...,n。构造次数不超过n的多项式p(x),使得 p(x
i
)=y
i
,i=0,1,...,n,由此可得到关于系数a0,a1,a2,...,a
n
的n 1元线性方程组:
[0124][0125]
此方程组的系数矩阵为范德蒙德矩阵,表示为:
[0126][0127]
由于x
i
,i=0,1,...,n互异,则
[0128][0129]
因此线性方程组的存在唯一解,各高次多项式插值具体算法如下:
[0130]
同线性插值法,三次样条插值法在每个间隔区间中使用三次多项式来拟 合曲线,使得曲线能在节点平滑连接,连接点两次连续可微。对于给定频率 区间[f0,f
n
],测量频率f
i
(i=0,1,...,n),对应测量辐射噪声谱级为 slf
i
(i=0,1,...,n)。假设各频率区间[f
i
,f
i 1
]的辐射噪声谱级曲线分段函数为 s
i
(f)=a
i
f3 b
i
f2 c
i
f d
i
(i=0,1,...,n
‑
1),其满足条件:
[0131]
各实测点连续,
[0132]
s
i
‑1(f
i
)=slf
i
=s
i
(f
i
);
[0133]
各实测点,一阶导数存在且连续,
[0134]
s
i
'
‑1(f
i
)=m
i
=s
i
'(f
i
);
[0135]
假设一阶导数m
i
(i=0,1,...,n)已知,则在频率区间[f
i
,f
i 1
]的三次样条插值 函数为:
[0136][0137]
设δf
i
=f
i 1
‑
f
i
,则
[0138][0139]
求得m
i
(i=0,1,...,n)即可得到函数曲线s(f)。假设给定端点的二阶导数 s'0'(f0)=m0,s”n
‑1(f
n
)=m
n
已知,通过解方程组:
[0140][0141]
得到m
i
。
[0142]
式中:
[0143][0144]
g
i
=3(λ
i
s[f
i
‑1,f
i
] μ
i
s[f
i
,f
i 1
])(i=1,2,...,n
‑
1)
[0145][0146][0147]
由此,基于以上原理,采用三次样条插值法对辐射噪声功率谱进行连续 谱级插值处理时,具体包括:将上述三次样条插值算法工程化,形成去耦的 插值模块,保留输入输出接口,输入参数为目标舰船被动噪声连续谱级,经 插值模块处理(即,对目标舰船被动噪声连续谱级进行上述处理过程)后, 输出插值后的噪声连续谱数据。
[0148]
通过以上所述方式实现对舰船被动辐射噪声数值的仿真之后,即可根据 所得到的仿真结果进行被动目标识别、目标跟踪路径规划等。其中,在根据 所得到的仿真结果进行被动目标识别时,可以通过以下方式实现被动目标的 识别。
[0149]
即,首先,通过预处理手段对信号频段进行滤波。预处理手段可以采用 本领域常规的滤波技术,以去除信号频段中的噪声等信息,此处不再进行赘 述。同时,还需要说明的是,通过预处理手段对信号频段进行滤波处理时, 所处理的信号数据为声呐阵元域所接收到的所有频段的信号。通过对接收到 的所有频段的信号进行滤波采样,得到被动目标识别所需要的频段的信号数 据。
[0150]
然后,预处理子模块中的输出数据(即,滤波采样后得到的被动目标识 别时所需
要的频段的信号数据)输入到空间处理子模块,空间处理子模块根 据前面任一所述的仿真方法对阵元域采样数据进行处理,得到相应的仿真结 果。
[0151]
同时,预处理子模块中的输出数据还输入到时间处理子模块,时间处理 子模块对阵元域采样数据先进行时延匹配处理得到目标的距离信息,再进行 多普勒匹配处理得到目标的多普勒信息。此处,需要说明的是,进行时延匹 配得到目标的距离信息和进行多普勒匹配得到目标的多普勒信息均为本领 域的常规技术手段,此处不再赘述。
[0152]
最后,谱分析模块利用空间处理子模块和时间处理子模块的检测结果进 行lofar谱和demon谱分析,得到被动目标的特征信息,进而在根据所得 到的被动目标的特征信息得到被动目标的识别结果。其中,谱分析模块进行 lofar谱和demon谱分析同样也可以采用本领域的常规谱分析技术手段 来实现,此处也不再赘述。
[0153]
需要说明的是,尽管以图1至图4作为示例介绍了如上所述的舰船被动辐 射噪声数值仿真方法的实现技术手段,但本领域技术人员能够理解,本技术 应不限于此。事实上,用户完全可根据个人喜好和/或实际应用场景灵活设定 各步骤的具体实现方式,只要能够保证仿真结果能够体现目标运动产生的多 普勒效应,完整展示舰船螺旋桨桨叶特征即可。
[0154]
相应的,基于前面任一所述的舰船被动辐射噪声数值仿真方法,本技术 还提供了一种舰船被动辐射噪声数值仿真装置。由于本技术提供的舰船被动 辐射噪声数值仿真装置的工作原理与本技术的舰船被动辐射噪声数值仿真 方法的原理相同或相似,因此重复之处不再赘述。
[0155]
参阅图5,本技术提供的舰船被动辐射噪声数值仿真装置100,包括数据 获取模块110、噪声仿真模块120和仿真合成模块130。其中,数据获取模块 110,被配置为获取用于舰船被动辐射噪声数值仿真的仿真数据。噪声仿真 模块120,被配置为基于仿真数据中的连续谱仿真数据、线谱仿真数据和调 制谱仿真数据,分别使用连续谱仿真模型、线谱仿真模型和调制谱仿真模型 进行连续谱分量仿真、线谱分量仿真和调制谱分量仿真。仿真合成模块130, 被配置为将连续谱分量仿真结果、线谱分量仿真结果和调制谱分量仿真结果 进行合成,得到辐射噪声功率谱。
[0156]
更进一步地,根据本技术的另一方面,还提供了一种舰船被动辐射噪声 数值仿真设备200。参阅图6,本技术实施例的舰船被动辐射噪声数值仿真设 备200包括处理器210以及用于存储处理器210可执行指令的存储器220。其中, 处理器210被配置为执行可执行指令时实现前面任一所述的舰船被动辐射噪 声数值仿真方法。
[0157]
此处,应当指出的是,处理器210的个数可以为一个或多个。同时,在 本技术实施例的舰船被动辐射噪声数值仿真设备200中,还可以包括输入装 置230和输出装置240。其中,处理器210、存储器220、输入装置230和输出 装置240之间可以通过总线连接,也可以通过其他方式连接,此处不进行具 体限定。
[0158]
存储器220作为一种计算机可读存储介质,可用于存储软件程序、计算 机可执行程序和各种模块,如:本技术实施例的舰船被动辐射噪声数值仿真 方法所对应的程序或模块。处理器210通过运行存储在存储器220中的软件程 序或模块,从而执行舰船被动辐射噪声数值仿真设备200的各种功能应用及 数据处理。
[0159]
输入装置230可用于接收输入的数字或信号。其中,信号可以为产生与 设备/终端/服务器的用户设置以及功能控制有关的键信号。输出装置240可以 包括显示屏等显示
设备。
[0160]
以上已经描述了本技术的各实施例,上述说明是示例性的,并非穷尽性 的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和 精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显 而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际 应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理 解本文披露的各实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。