1.本发明涉及混凝土地面平整作业装置领域,尤其涉及一种混凝土地面精平机器人及基于精平机器人的作业方法。
背景技术:
2.在建筑行业中混凝土楼地面的标高和找平是一项重要且繁琐的工作,目前施工过程中主要分以下六步工序:第一,在浇筑混凝土时使用外置扫平仪控制标高;第二,用托板把混凝土地面大致扒平;第三,用刮尺进行较大范围找平;第四,待混凝土浇筑1h左右基本沉实,使用刮杠沿纵向和横向对混凝土地面各刮一遍;第五,使用混凝土抹平机铁盘对混凝土楼地面进行抹平;最后,使用抹平机刀片对混凝土楼地面进行收光。整个施工过程大量依赖人工,不仅耗费人力物力,增加工程周期,同时工程质量高度依赖工人的操作水平,得不到可靠的保障。
技术实现要素:
3.为提升建筑行业中混凝土楼层地面标高作业和找平作业的工作效率,提高混凝土楼层地面工程质量,缩短工程周期,降低劳动强度和人工成本,特提出本发明。
4.实现本发明目的的技术方案是:一种混凝土地面精平机器人,包括行走机构,所述行走机构可以带动所述精平机器人在混凝土初凝及初凝后时段的地面上行走作业;
5.机身主体,所述机身主体设置于所述行走机构上方,并可相对于所述行走机构进行转动;
6.精平执行机构,所述精平执行机构用于对凸起的混凝土地面进行等标高刮平和/或抹平,可对凹陷的混凝土地面进行补料填充;
7.姿态传感器,所述姿态传感器设于精平执行机构上,用于对所述精平执行机构的姿态进行实时检测;
8.调整机构,所述调整机构连接所述机身主体和所述精平执行机构,所述调整机构可以对所述精平执行机构的高度和俯仰姿态进行调整;
9.水平基准发射设备,所述水平基准发射设备用于设置混凝土地面标高基准,所述标高基准位于相对基准线固定标高处,所述标高基准为精平机器人的水平标高基准参考面;
10.激光感应器,所述激光感应器用于接收水平基准发射设备的激光信号,所述激光感应器设置于所述精平执行机构上,通过所述激光感应器可以测量所述精平机器人相对于所述水平基准发射设备激光基准平面的相对位置;
11.控制系统,所述控制系统根据所述水平标高基准参考面位置信息和所述精平机器人上的姿态传感器信息,通过所述调整机构对所述精平执行机构的高度和姿态进行控制。
12.作为优选,所述精平机器人还包括转向机构,所述转向机构可以使精平机器人进行转向,所述转向机构设置于所述机身主体与行走机构上;所述转向机构由所述控制系统
进行转向控制。
13.作为优选,所述转向机构包括连杆支撑平台和回转平台,所述连杆支撑平台通过回转平台设于行走机构上,行走机构相对连杆支撑平台转动;所述连杆支撑平台包括设于机身主体上的连杆支撑机构和直线驱动模组,所述直线驱动模组驱动所述连杆支撑机构进行张合运动。
14.作为优选,所述连杆支撑机构包括与直线驱动模组滑动连接的驱动板和设于驱动板上对称设置的数个连杆装置,每一所述连杆装置包括驱动连杆、摆臂、连接板、方向控制连杆和连杆底座,所述驱动连杆一端与驱动板铰接,驱动连杆另一端铰接有摆臂,所述摆臂设有第一铰接点、第二铰接点和第三铰接点,所述驱动连杆另一端通过第一铰接点与摆臂铰接,所述连接板一端连接至第二铰接点处,连接板另一端与方向控制连杆一端铰接,所述方向控制连杆另一端与设置在机身主体上的连杆底座一端铰接,所述连杆底座另一端连接至所述第三铰接点处,所述连杆装置还包括设于连接板远离直线驱动模组一端的可支撑于地面的支撑脚。
15.作为优选,所述摆臂、连接板、方向控制连杆、连杆底座组成平行四边形机构。
16.作为优选,所述驱动板、驱动连杆、摆臂、直线驱动模组组成直线摇杆机构。
17.作为优选,所述精平执行机构包括抹平板,所述调整机构包括用于前后俯仰的前后俯仰调节机构、用于左右摇摆的左右摇摆角度调节机构和用于上下高度调整的上下高度调节机构。
18.作为优选,所述前后俯仰调节机构包括俯仰调节组件和设于所述精平机器人机身主体的铰接轴,所述俯仰调节组件与所述精平机器人机身主体通过所述铰接轴在俯仰调节电机的驱动下实现铰接,且所述俯仰调节组件沿所述行走机构进行俯仰运动;所述左右摇摆角度调节机构包括设于俯仰调节组件上的左右摇摆电机和与左右摇摆电机输出轴垂直设置的左右摇摆组件,所述左右摇摆组件沿所述俯仰调节组件进行左右摇摆运动;所述上下高度调节机构包括与精平执行机构固定的高度调节滑块和设于所述左右摇摆组件上的滑轨,所述高度调节滑块通过高度调节电机驱动从而带动所述精平执行机构沿滑轨上下滑动。
19.本发明还提供一种基于所述混凝土地面精平机器人的作业方法,包括如下步骤:
20.步骤一:接收作业信息:设置楼层标高基准面和作业区域信息;
21.步骤二:控制系统接收到激光感应器和姿态传感器的信息,计算出当前精平执行机构的位置和姿态调整量,并控制调整机构把精平执行机构调整到合适的范围内;
22.步骤三:控制系统启动精平执行机构和行走机构开始工作;
23.步骤四:在工作中激光感应器和姿态传感器实时检测,并实时控制精平执行机构的位置和姿态;
24.步骤五:重复直至作业结束。
25.作为优选,还包括步骤四’:控制系统计算到精平机器人行走到作业区域边缘时,控制系统暂停行走机构和精平执行机构动力,并启动转向机构进行转向,转向后再次启动行走机构和精平执行机构;
26.采用了上述技术方案,本发明具有以下的有益效果:(1)本发明公开了一种主要应用于混凝土楼层地面标高和找平作业的行走机器人(以下简称精平机器人),本精平机器人
替代人工对地面进行刮平抹平,在控制作业区域混凝土地面标高合格的情况下,通过行走实现对大范围混凝土楼地面进行找平。本精平机器人采用精密传感器实现对楼层标高和混凝土地面找平度的自动控制,一次作业即可达到原来刮平、抹平等三步工序的效果,大大提高了作业效率,保障了作业质量,同时降低劳动强度和人工成本。
27.(2)本发明采用外置式水平基准发射设备设置标高基准面,精平机器人通过自身的传感器接收标高基准面信号并结合自身姿态信息,实时控制作业参数,实现对大范围混凝土地面的标高和找平度控制。
28.(3)所述精平机器人可替代人工进行混凝土楼地面的标高和找平作业,一次作业即可达到要求,无需往复作业,在降低了劳动强度和人工成本的同时,提升了作业效率。
29.(4)所述行走机构可以带动所述精平机器人进行大范围混凝土楼层地面标高和找平作业,能确保大范围混凝土楼层地面标高一致且平整度合格,解决了人工无法在大范围混凝土地面找平的难点。
30.(5)所述机身主体上安装有所述精平机器人的所述控制系统、所述调整机构、所述转向机构、所述精平执行机构和传感器等,并设置有防护措施,从而使所述精平机器人结构紧凑,行动灵活,可以适应较为复杂和恶劣的施工环境。
31.(6)所述转向机构可以使所述精平机器人在一定范围内进行转向行走,从而使所述精平机器人可以在不同的施工区域按预设路径行走。转向机构中的连杆支撑机构与行走机构采用转台连接,确保连接稳定可靠,能承受较大偏载,连杆支撑机构的张开,可使精平机器人整体举升,在这个过程中,又同时控制了驱动力的合理分配,同时机构死点状态可以降低对驱动的要求,解决现有技术如果需要实现多功能,需要用到多个驱动力的技术问题。
32.(7)所述精平执行机构具有刮平和补料填充功能,可以对不同的混凝土地面进行找平作业,使作业后的混凝土地面平整度合格。
33.(8)所述姿态传感器可以实时检测精平执行机构的姿态,通过将所述精平执行机构的姿态信息传送给所述控制系统,使所述控制系统知道当前所述精平执行机构的工作姿态。
34.(9)所述调整机构可以对所述精平执行机构的位置和姿态进行调整,从而使作业后的地面标高和平整度满足要求。
35.(10)通过所述水平基准发射设备设置混凝土地面标高基准参考面,给所述精平机器人一个稳定精准的高度参考面,使所述精平机器人在行走中有了一个准确的高度参考。
36.(11)所述精平机器人上的所述激光感应器能够测量到所述标高基准参考面的高度位置信号,从而使所述精平机器人解算出所述精平执行机构当前的工作面高度,以判断当前找平后的混凝土地面是否满足标高要求。
37.(12)所述控制系统接收所述精平执行机构的高度信息和姿态信息,经过控制系统的分析计算,通过所述调整机构对所述精平执行机构的位置和姿态实时控制,确保了作业后的混凝土地面标高和平整度在合格范围。
附图说明
38.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中
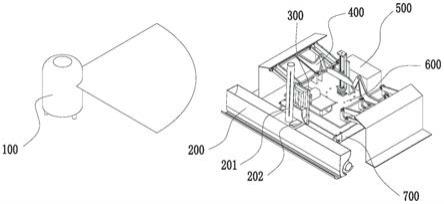
39.图1为本发明的结构示意图;
40.图2为转向机构、机身主体和行走机构的结构示意图;
41.图3为图2爆炸图;
42.图4为本发明中连杆支撑机构收缩的主视图;
43.图5为图2的部分结构示意图;
44.图6为连杆支撑机构半展开的结构示意图;
45.图7为连杆支撑机构全部展开的结构示意图;
46.图8为本发明精平执行机构和调整机构的结构示意图;
47.图9为图8的爆炸图;
48.图10为本发明精平执行机构和调整机构的另一视角的结构示意图;
49.图11为图8的主视图;
50.图12为图8的剖视图;
51.图13为本发明的作业流程框图。
具体实施方式
52.实施例一
53.见图1至图13,本实施例的混凝土地面精平机器人,包括行走机构700,所述行走机构700可以带动所述精平机器人在混凝土初凝及初凝后时段的地面上行走作业;
54.机身主体600,所述机身主体600设置于所述行走机构700上方,并可相对于所述行走机构700进行转动;
55.转向机构400,所述转向机构400可以使精平机器人进行转向,所述转向机构400设置于所述机身主体600与行走机构700上;
56.精平执行机构200,所述精平执行机构200用于对凸起的混凝土地面进行等标高刮平和/或抹平,可对凹陷的混凝土地面进行补料填充;
57.姿态传感器202,所述姿态传感器202可采用陀螺仪;所述姿态传感器202设于精平执行机构200上,用于对所述精平执行机构200的姿态进行实时检测;
58.调整机构300,所述调整机构300连接所述机身主体600和所述精平执行机构200,所述调整机构300可以对所述精平执行机构200的高度和俯仰姿态进行调整;
59.水平基准发射设备100,所述水平基准发射设100备可采用扫平仪;所述水平基准发射设备100用于设置混凝土地面标高基准,所述标高基准位于相对基准线固定标高处,所述标高基准为精平机器人的水平标高基准参考面;在混凝土地面找平作业范围之外稳固的平台放置所述水平基准发射设备100,通过所述水平基准发射设备100发射的激光平面为精平机器人设置精准的水平标高基准参考面;
60.激光感应器201,所述激光感应器201用于接收水平基准发射设备100的激光信号,所述激光感应器201设置于所述精平执行机构200上,通过所述激光感应器201可以测量所述精平机器人相对于所述水平基准发射设备100激光基准平面的相对位置;
61.控制系统500,所述控制系统500根据所述水平标高基准参考面位置信息和所述精平机器人上的姿态传感器信息,通过所述调整机构300对所述精平执行机构200的高度和姿态进行控制,而且可通过所述转向机构400进行转向控制。所述控制系统500硬件设置于所
述机身主体600上。
62.所述转向机构400包括连杆支撑平台900和回转平台800,所述连杆支撑平台900通过回转平台800设于行走机构700上,行走机构700相对连杆支撑平台900转动;所述连杆支撑平台900包括设于机身主体上的连杆支撑机构409和直线驱动模组403,所述直线驱动模组403驱动所述连杆支撑机构409进行张合运动。所述直线驱动模组403提供连杆支撑机构409展开支撑和缩回的动力,直线驱动模组403上的输出滑块与连杆支撑机构409固定来接,所述直线驱动模组403可采用现有技术公开的直线驱动模组机构即可,因而对其具体结构组成不做赘述。
63.所述连杆支撑机构409包括与直线驱动模组403滑动连接的驱动板404和设于驱动板404上对称设置的数个连杆装置,每一所述连杆装置包括驱动连杆405、摆臂402、连接板406、方向控制连杆407和连杆底座408,所述驱动连杆405一端与驱动板404铰接,驱动连杆405另一端铰接有摆臂402,所述摆臂402设有第一铰接点412、第二铰接点410和第三铰接点411,所述驱动连杆405另一端通过第一铰接点412与摆臂402铰接,所述连接板406一端连接至第二铰接点410处,连接板406另一端与方向控制连杆407一端铰接,所述方向控制连杆407另一端与设置在机身主体600上的连杆底座408一端铰接,所述连杆底座408另一端连接至所述第三铰接点411处,所述连杆装置还包括设于连接板406远离直线驱动模组403一端的可支撑于地面的支撑脚401。支撑脚401在撑起精平机器人时,支撑脚的运动状态接近向下的直线运动,即向下移动75mm,水平移动3mm,接近向下的直线运动,对地面的破坏较小,经实验论证,本方案可以达到在支撑脚升降75mm的高度时,其水平位移变动≤3mm。
64.所述摆臂402、连接板406、方向控制连杆407、连杆底座408组成平行四边形机构。所述驱动板404、驱动连杆405、摆臂402、直线驱动模组403组成直线摇杆机构。本技术采用连杆支撑机构409来实现支撑作用,可以使精平机器人在工作时收缩成体积较小的状态,仅在转向时展开,大大节省占地空间,且确保连接稳定可靠,能承受较大偏载。所述连杆支撑机构409由直线摇杆机构和平行四边形机构等联合组成,所述摆臂402、连接板406、方向控制连杆407、连杆底座408组成平行四边形机构。所述驱动板404、驱动连杆405、摆臂402、直线驱动模组403组成直线摇杆机构。直线摇杆机构将直线方向的驱动力转换为转动驱动力并对机构运动速度进行分配(开始展开时力小,运动速度快;支撑时负载大,运动速度慢;这样降低了对驱动系统的要求),平行四边形机构实现了对支撑脚的姿态控制,确保支撑脚的支撑面始终平行于地面。直线摇杆机构在支撑状态时处于机构死点或接近死点状态(即驱动板404与驱动连杆405处于同一平行直线,驱动连杆405的两个铰接点处于同一水平),即在撑起状态精平机器人转向时,连杆驱动系统不需要很大的保持力,甚至可以待机,降低了对驱动系统的要求,同时也提高了驱动系统的使用寿命。
65.所述回转平台800包括通过轴承连接的内圈和外圈,所述机身主体600与其中一个圈固接,行走机构700与另一圈固接。所述内圈和外圈的相对转动,带动所述机身主体600和行走机构700的相对转动。
66.所述精平执行机构200包括将凸起地面进行刮平的绞龙机构205、用于下料的料斗203、用于对混凝土地面进行刮料或填料的抹平板204,所述调整机构300包括用于前后俯仰的前后俯仰调节机构、用于左右摇摆的左右摇摆角度调节机构和用于上下高度调整的上下高度调节机构。本发明采用料斗203存储一定的混凝土,可对凹陷的混凝土地面进行填充平
整。本发明设置抹平板204,可对经过刮料或填料处理的地面进行抹平,本发明采用绞龙机构205对凸起的地面进行刮平,绞龙机构205装在料斗上,可相对料斗203转动,绞龙机构205可正转或反转,将凸起地面多余的混凝土排向固定的一侧,所述绞龙机构205也可用其他旋转刀具机构替代。
67.所述前后俯仰调节机构包括俯仰调节组件207和设于所述精平机器人机身主体600的铰接轴2013,所述俯仰调节组件207与所述精平机器人机身主体600通过所述铰接轴2013在俯仰调节电机的驱动下实现铰接,且所述俯仰调节组件207沿所述行走机构700进行俯仰运动;所述左右摇摆角度调节机构包括设于俯仰调节组件207上的左右摇摆电机208和与左右摇摆电机208输出轴垂直设置的左右摇摆组件209,所述左右摇摆组件209沿所述俯仰调节组件207进行左右摇摆运动;在左右摇摆电机208的驱动下,左右摇摆电机208输出轴带动左右摇摆组件209沿左右摇摆电机208输出轴左右正转或反转;所述上下高度调节机构包括与精平执行机构200固定的高度调节滑块2010和设于所述左右摇摆组件209上的滑轨2011,所述高度调节滑块2010通过高度调节电机驱动从而带动所述精平执行机构200沿滑轨2011上下滑动。
68.在实施过程中:所述混凝土地面精平机器人按照如下作业方法作业:
69.步骤一:接收作业信息:设置楼层标高基准面和作业区域信息;
70.步骤二:控制系统500接收到激光感应器201和姿态传感器202的信息,计算出当前精平执行机构200的位置和姿态调整量,并控制调整机构300把精平执行机构200调整到合适的范围内;
71.步骤三:控制系统500启动精平执行机构200和行走机构700开始工作;
72.步骤四:在工作中激光感应器201和姿态传感器202实时检测,并实时控制精平执行机构200的位置和姿态;当需要调节前后俯仰高度时,通过调节所述俯仰调节组件与所述精平机器人机身主体间的铰接轴的转动来实现;当需要调节左右摇摆角度时,在左右摇摆电机208的驱动下,左右摇摆电机208输出轴带动左右摇摆组件209沿左右摇摆电机208输出轴左右正转或反转;当需要调节上下高度时,所述高度调节滑块2010在高度调节电机的驱动下带动所述精平执行机构沿滑轨2011上下滑动,从而调节所述绞龙机构205和抹平板204与地面间的高度距离,调整到合适的场景后,所述平整机构通过绞龙机构205和抹平板204进行地面平整,当混凝土地面某处凸出标高时,采用绞龙机构205进行刮平,刮平后的物料再经过抹平板204进行抹平调节,当混凝土地面某处低于标高时,精平执行机构的料斗203下料,抹平板204继续实现刮平即可;
73.步骤四’:控制系统500计算到精平机器人行走到作业区域边缘时,控制系统500暂停行走机构700和精平执行机构200动力,并启动转向机构400进行转向,所述转向机构400在精平机器人需要转向时,首先由连杆支撑机构409展开将精平机器人自身撑起离开混凝土地面,然后回转驱动机构带动回转平台800进行回转运动,驱使精平机器人通过行走机构700转动到指定角度,最后连杆支撑机构409收缩将转向后的精平机器人放下。转向后再次启动行走机构700和精平执行机构200;
74.步骤五:重复直至作业结束。
75.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡
在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。