1.本发明涉及一种仿生机械手驱动结构及驱动方法,属于机器人领域。
背景技术:
2.现有能模仿人手指手腕全方位动作的仿生机械手,由于要考虑手腕摆动和转动机构,主要布局是将微型电机放置于狭小的手掌和手指空间,使得结构复杂且力矩不大,负载能力弱,实用性差。
技术实现要素:
3.为了克服上述现有技术的不足,本发明提供了一种像人手一样灵活有力的仿生机械手驱动结构,并给出其驱动方法。
4.为了实现上述技术目的,本发明采用的技术方案是:一种仿生机械手驱动结构,包括五根手指组件、一个手掌组件和小臂,五根手指组件连接手掌组件,手掌组件连接小臂;在手指组件和手掌组件内不设置电机,只设置牵引绳管道,小臂由小臂骨架和外部壳体组成,小臂骨架由两个中空结构的骨架对接构成,骨架内设置若干卡位,用于对应安装槽轮和固定导向管;手指舵机和手腕摆动舵机设置在小臂骨架的中空结构中,手指牵引绳和手腕摆动牵引绳都穿在各自的牵引绳管道中,手指牵引绳一端连接手指末端指节,另一端通过槽轮连接手指舵机,手腕摆动牵引绳一端连接手腕摆动槽轮,另一端连接手腕摆动舵机,手腕旋转电机设置在小臂后端,通过控制手指舵机、手腕舵机和手腕旋转电机,实现手指运动、手腕摆动、手腕旋转或上述运动的组合。
5.每根手指组件由一个独立的手指舵机通过槽轮和牵引绳连接驱动,五根手指组件的动作由设置在小臂内的手指舵机驱动手指牵引绳完成,手腕摆动由设置在小臂内的舵机驱动手腕牵引绳完成,手腕旋转则由位于小臂后端的旋转电机驱动旋转小臂实现手腕旋转。
6.进一步的,所述手掌组件包括外掌背板和内掌骨架板,所述内掌骨架板上设置敷设有内侧手掌板,在内掌骨架板中设置对于手指的牵引绳导向槽,在内掌骨架板靠近小臂侧设置手腕摆动槽轮和手腕转轴,手腕摆动槽轮安装再手腕转轴上,靠近手指侧设置若干手指根部固定座,外掌背板扣接在内掌骨架板上,使牵引绳导向槽构成牵引绳管道。
7.更进一步的,所述手腕转轴下部的内掌骨架板为扇形开口,手指牵引绳在通过轴心后不会因为转轴转动而发生长度变化。
8.更进一步的,每根所述手指组件包括若干指关节,两个相邻的指关节一端铰接,靠近手掌组件的指关节一端安装在手指根部固定座上,在指关节的指背上设置弹性复位件。
9.手指组件的手指弯曲靠内部手指牵引绳牵引,手指伸直靠手指背部安装的弹性硅胶复位。
10.进一步的,所述手指舵机设置六个,其中五个直接连接手指牵引绳控制手指弯曲,另一个通过虎口收紧牵引绳固定在大拇指根部指节上控制虎口收紧,在大拇指外部与手掌
之间设置弹性复位件用于虎口打开;所述手腕摆动舵机设置一个,通过环形牵引绳牵引手掌以手腕转轴为中心进行摆动,环形牵引绳位于两个半圆中心点位置都用螺丝固定;七个舵机以输出轴左右交叉方式间隔阵列排布,以便有效排布牵引绳和导向管。
11.更进一步的,所述手腕摆动槽轮设置一个,五个手指牵引绳导向槽位于手腕摆动槽轮一侧,虎口收紧牵引绳导向槽位于手腕摆动槽轮另一侧;手掌内部的手指牵引绳安装在由两个半手掌上的牵引绳导向槽构成的牵引绳管道内,手指牵引绳一端安装在与之对应的手指舵机的槽轮上,端头由压绳螺丝压在槽轮上部舵轮凸台内,另一端穿过导向管和手掌内部的导向槽,固定在对应手指末端;导向管一端固定在小臂内侧骨架上,另一端固定在十字支架上,十字支架固定在小臂内侧骨架靠近手腕处。
12.进一步的,所述手腕摆动牵引绳使用同步带,手掌上的手腕摆动槽轮和驱动手腕摆动的舵轮为同步轮。
13.进一步的,所述导向管为聚四氟乙烯管或尼龙管,既可以限定牵引绳的长度,又可以在小臂骨架内按设定位置摆放,使得牵引绳两端都与受力方向相切。
14.本发明的有益技术效果是:1、 手部驱动电机布置在小臂内,可以最大限度选用大力矩电机;2、手腕处利用铰接只满足摆动运动,小臂旋转后置,使手腕结构简单,成本降低;3、小臂内舵机的交叉阵列布局使得空间有效利用,大幅提升手指负载;4、导向管采用自润滑材料,且按空间位置柔性布置,可充分利用小臂内部空间,安装方便,且使牵引绳传动效率最大化。
附图说明
15.下面结合附图对本发明进一步说明。
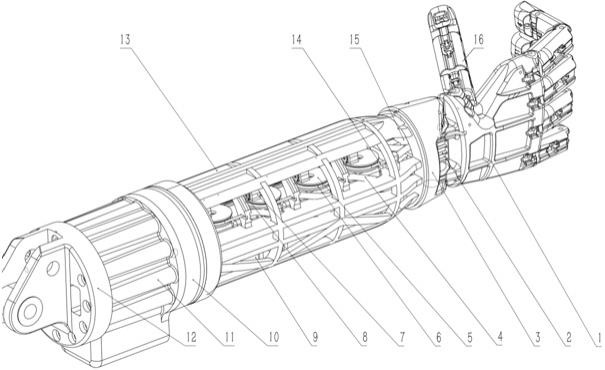
16.图1为本发明的结构示意图;图2 为本发明的结果的局部爆炸示意图;图3为本发明的内掌骨架板结构示意图。
17.图中:1、手掌组件,2、手指牵引绳,3、小臂,30、小臂骨架,31、手腕摆动槽轮,32、手腕转轴,33、内侧手掌板,34、牵引绳导向槽,35、手指根部固定座,36、扇形开口,4、导向管,5、手指舵轮,6、手指牵引绳(小臂内),7、舵轮凸台,8、压绳螺丝,9、舵机,10、法兰,11、手腕旋转电机,12、肘关节体,13、小臂内侧骨架,14、手腕摆动牵引绳,15、十字支架,16、手指组件。
具体实施方式
18.如图1、2、3所示的一种仿生机械手驱动结构,包括五根手指组件16、一个手掌组件1和小臂3,五根手指组件16连接手掌组件1,手掌组件1连接小臂3;在手指组件16和手掌组件1内不设置电机,只设置牵引绳管道,小臂3由小臂骨架30和外部壳体组成,小臂骨架30由两个中空结构的骨架对接构成,骨架内设置若干卡位,用于对应安装槽轮和固定导向管4;手指舵机5和手腕摆动舵机设置在小臂骨架30的中空结构中,手指牵引绳2和手腕摆动牵引绳14都穿在各自的牵引绳管道中,手指牵引绳2一端连接手指末端指节,另一端通过槽轮连接手指舵机5,手腕摆动牵引绳14一端连接手腕摆动槽轮31,另一端连接手腕摆动舵机,手
腕旋转电机11设置在小臂3后端,通过控制手指舵机、手腕舵机和手腕旋转电机11,实现手指运动、手腕摆动、手腕旋转或上述运动的组合。
19.小臂的手腕旋转电机11后部连接肘关节体12,用于与大臂连接。手腕旋转由小臂后端靠近肘关节的减速伺服电机一体机驱动。该减速伺服电机一体机是先有设备,无需设计,可以直接购买装配使用,手腕旋转电机11通过法兰10与小臂连接。
20.每根手指组件16由一个独立的手指舵机通过槽轮和牵引绳连接驱动,五根手指组件16的动作由设置在小臂内的手指舵机驱动手指牵引绳完成,手腕摆动由设置在小臂内的舵机驱动手腕牵引绳完成,手腕旋转则由位于小臂后端的旋转电机驱动旋转小臂实现手腕旋转。
21.手掌组件1包括外掌背板和内掌骨架板,内掌骨架板上设置敷设有内侧手掌板33,在内掌骨架板中设置对于手指的牵引绳导向槽34,在内掌骨架板靠近小臂侧设置手腕摆动槽轮31和手腕转轴32,手腕摆动槽轮31安装再手腕转轴32上,靠近手指侧设置若干手指根部固定座35,外掌背板扣接在内掌骨架板上,使牵引绳导向槽34构成牵引绳管道。
22.手腕转轴32下部的内掌骨架板为扇形开口36,手指牵引绳在通过轴心后不会因为转轴转动而发生长度变化。
23.每根手指组件16包括若干指关节,两个相邻的指关节一端铰接,靠近手掌组件的指关节一端安装在手指根部固定座上,在指关节的指背上设置弹性复位件。手指组件的手指弯曲靠内部手指牵引绳牵引,手指伸直靠手指背部安装的弹性硅胶复位。
24.手指舵机设置六个,其中五个直接连接手指牵引绳控制手指弯曲,另一个通过虎口收紧牵引绳固定在大拇指根部指节上控制虎口收紧,在大拇指外部与手掌之间设置弹性复位件用于虎口打开;手腕摆动舵机设置一个,通过环形牵引绳牵引手掌以手腕转轴为中心进行摆动,环形牵引绳位于两个半圆中心点位置都用螺丝固定;七个舵机以输出轴左右交叉方式间隔阵列排布,以便有效排布牵引绳和导向管。
25.手腕摆动槽轮31设置一个,五个手指牵引绳导向槽位于手腕摆动槽轮一侧,虎口收紧牵引绳导向槽位于手腕摆动槽轮另一侧;手掌内部的手指牵引绳安装在由两个半手掌上的牵引绳导向槽构成的牵引绳管道内,手指牵引绳一端安装在与之对应的手指舵机的槽轮上,端头由压绳螺丝8压在槽轮上部舵轮凸台7内,另一端穿过导向管和手掌内部的导向槽,固定在对应手指末端;导向管4一端固定在小臂内侧骨架13上,另一端固定在十字支架15上,十字支架15固定在小臂内侧骨架13靠近手腕处。
26.手腕摆动牵引绳使用同步带,手掌上的手腕摆动槽轮和驱动手腕摆动的舵轮为同步轮。
27.导向管4为聚四氟乙烯管或尼龙管,既可以限定牵引绳的长度,又可以在小臂骨架内按设定位置摆放,使得牵引绳两端都与受力方向相切。
28.本发明的有益技术效果是:1、 手部驱动电机布置在小臂内,可以最大限度选用大力矩电机;2、手腕处利用铰接只满足摆动运动,小臂旋转后置,使手腕结构简单,成本降低;3、小臂内舵机的交叉阵列布局使得空间有效利用,大幅提升手指负载;4、导向管采用自润滑材料,且按空间位置柔性布置,可充分利用小臂内部空间,安装方便,且使牵引绳传动效率最大化。
29.本发明所公开的实施例,只作为对本发明的解释说明,并不作为对本发明特征的限定,在本发明基础上的简单替换和变形,属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。