1.本发明涉及一种搅拌车筒体全自动工艺流转方法,属于搅拌车技术领域。
背景技术:
2.搅拌车是用来将混凝土运输到指定地方的一种特种车辆,其核心结构件为筒体,筒体内按一定规则摆放并焊接好的叶片,在筒体运输过程中,需要对筒体进行旋转,以防筒体内混凝土凝固。
3.现有技术中,搅拌车筒体在生产过程较复杂,需要经过多道工序方可制造完成,目前各道工序间工件流转多使用人工操作车间现有行车完成,其需要人工使用吊具兜住筒体完成转运,吊具的取放均由人工完成。
4.现国内一些厂家对搅拌筒生产方式做出了一些改进,在筒体转运过程中,尝试使用rgv小车完成,因rgv小车带升降功能,可自动钻入筒体下之后举升,完成工件在各工序间的流转。然而,使用rgv小车背负工件完成转运就需要预留一条转运通道,通道内铺设rgv运行轨道,且转运通道内不得有障碍物,这样该通道就无法布局生产设备,因此厂房利用率仍旧较低,筒体的生产效率也较低。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种搅拌车筒体全自动工艺流转方法,合理规划了搅拌车筒体各生产工序布局,并采用桁架机器人完成各区工件的上下料,以实现搅拌车筒体全自动流转,提高生产效率。
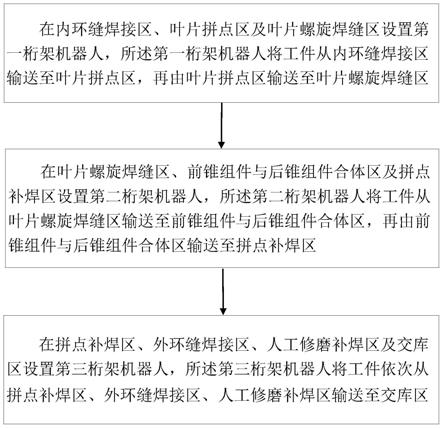
6.为解决上述技术问题,本发明是采用下述技术方案实现的:本发明提供一种搅拌车筒体全自动工艺流转方法,包括如下步骤:在内环缝焊接区、叶片拼点区及叶片螺旋焊缝区设置第一桁架机器人,所述第一桁架机器人将工件从内环缝焊接区输送至叶片拼点区,再由叶片拼点区输送至叶片螺旋焊缝区;在叶片螺旋焊缝区、前锥组件与后锥组件合体区及拼点补焊区设置第二桁架机器人,所述第二桁架机器人将工件从叶片螺旋焊缝区输送至前锥组件与后锥组件合体区,再由前锥组件与后锥组件合体区输送至拼点补焊区;在拼点补焊区、外环缝焊接区、人工修磨补焊区及交库区设置第三桁架机器人,所述第三桁架机器人将工件依次从拼点补焊区、外环缝焊接区、人工修磨补焊区输送至交库区。
7.作为一种优选实施方式,所述第一桁架机器人、第二桁架机器人、第三桁架机器人设于同一轨道上。
8.作为一种优选实施方式,所述内环缝焊接区设有两个工位,位于所述内环缝焊接区的工件由rgv完成上料,由第一桁架机器人完成下料。
9.作为一种优选实施方式,所述叶片拼点区设有五个工位,位于所述叶片拼点区的
工件由第一桁架机器人完成上料和下料。
10.作为一种优选实施方式,所述叶片螺旋焊缝区设有四个工位,位于所述叶片螺旋焊缝区的工件由第一桁架机器人完成上料,第二桁架机器人完成下料。
11.作为一种优选实施方式,所述人工修磨补焊区设有三个工位,用于完成位于所述人工修磨补焊区的工件的焊缝检测和修补。
12.作为一种优选实施方式,所述第一桁架机器人、第二桁架机器人、第三桁架机器人上均设有用于上料、下料的吊装机构,所述吊装机构用于设于工件上方。
13.与现有技术相比,本发明所达到的有益效果:1、本发明提供一种搅拌车筒体全自动工艺流转方法,包括如下步骤:在内环缝焊接区、叶片拼点区及叶片螺旋焊缝区设置第一桁架机器人,在叶片螺旋焊缝区、前锥组件与后锥组件合体区及拼点补焊区设置第二桁架机器人,在拼点补焊区、外环缝焊接区、人工修磨补焊区及交库区设置第三桁架机器人,通过所述第一桁架机器人、第二桁架机器人、第三桁架机器人之间的相互配合,将工件依次从内环缝焊接区输送至叶片拼点区、叶片螺旋焊缝区、前锥组件与后锥组件合体区、拼点补焊区、外环缝焊接区、人工修磨补焊区输送至交库区。本发明合理规划了搅拌车筒体各生产工序布局,并采用桁架机器人完成各区工件的上下料,以实现搅拌车筒体全自动流转,提高生产效率。
14.2、本发明通过在内环缝焊接区、叶片拼点区、叶片螺旋焊缝区等工序区设置多个工位,能够同时进行多个工件处理,以提高生产效率,同时,将吊装机构设于工件上方,不影响转运通道的使用,进而提高厂房利用率。
附图说明
15.图1是本发明实施例提供的一种搅拌车筒体全自动工艺流转方法的流程示意图;图2是本发明实施例提供的一种搅拌车筒体全自动工艺流转方法的生产设备布局示意图;图中:1、第一桁架机器人;2、第二桁架机器人;3、第三桁架机器人;4、内环缝焊接区;5、叶片拼点区;6、叶片螺旋焊缝区;7、前锥组件与后锥组件合体区;8、拼点补焊区;9、外环缝焊接区;10、人工修磨补焊区;11、交库区。
具体实施方式
16.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
17.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、
ꢀ“
底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
18.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
19.本发明提供一种搅拌车筒体全自动工艺流转方法,其流程示意图请参见图1,所述搅拌车筒体全自动工艺流转方法的生产设备布局示意图,请参见图2,所述搅拌车筒体全自动工艺流转方法,包括如下步骤:第一步、将第一桁架机器人1设置于内环缝焊接区4、叶片拼点区5及叶片螺旋焊缝区6,所述第一桁架机器人1能够将工件从内环缝焊接区4输送至叶片拼点区5,再由叶片拼点区5输送至叶片螺旋焊缝区6。
20.具体地,所述第一桁架机器人1沿导轨实现x轴移动,所述第一桁架机器人1上设有用于上料、下料的吊装机构,所述吊装机构设于工件上方,以方便从工位的上方完成上料、下料工序。更具体地,所述第一桁架机器人1先向内环缝焊接区4上料,待工件在内环缝焊接区4完成内环缝焊接后,第一桁架机器人1将工件从内环缝焊接区4的工位上进行下料工序,需要说明的是,所述内环缝焊接区4设有两个工位,所述第一桁架机器人1可以将工件放置到内环缝焊接区4的两个工位,以进行内环缝焊接工序。应当理解,位于所述内环缝焊接区4的工件也可以由rgv完成上料,由第一桁架机器人1完成下料。
21.当第一桁架机器人1将经内环缝焊接的工件从内环缝焊接区4下料后,所述第一桁架机器人1将工件输送至叶片拼点区5,所述叶片拼点区5设有五个工位,所述第一桁架机器人1可以将五个经内环缝焊接的工件放置到叶片拼点区5的工位上,以完成叶片拼点工序,所述第一桁架机器人1能够根据叶片拼点情况,将完成叶片拼点的工件从叶片拼点区5取下,即完成下料工序。
22.此时,完成叶片拼点后的工件,经第一桁架机器人1输送至叶片螺旋焊缝区6,详细而言,所述叶片螺旋焊缝区6设有四个工位,经叶片拼点后的工件在叶片螺旋焊缝区6的工位上进行叶片螺旋焊缝工序,以使多个叶片能够焊接成一体,待叶片焊接完成后,由第二桁架机器人2完成下料工序。
23.第二步、在叶片螺旋焊缝区6、前锥组件与后锥组件合体区7及拼点补焊区8设置第二桁架机器人2,所述第二桁架机器人2将工件从叶片螺旋焊缝区6输送至前锥组件与后锥组件合体区7,再由前锥组件与后锥组件合体区7输送至拼点补焊区8。应当理解,所述第一桁架机器人1、第二桁架机器人2都可以在叶片螺旋焊缝区6移动。
24.本实施例中,所述第二桁架机器人2在完成对工件进行叶片螺旋焊缝焊接下料工序后,将工件输送至前锥组件与后锥组件合体区7,所述前锥组件与后锥组件合体区7设有两个工位,此时工件分为前锥组件和后锥组件,当第二桁架机器人2将前锥组件和后锥组件输送至前锥组件与后锥组件合体区7时,前锥组件与后锥组件完成合模,形成预制筒体,待合模完成后,第二桁架机器人2将工件进行下料,并输送至拼点补焊区8。
25.所述拼点补焊区8设有四个工位,当预制筒体被输送至拼点补焊区8后,工作人员根据预制筒体的状况对预制筒体进行拼点补焊,当拼点补焊完成后,由第三桁架机器人3进行下料。
26.第三步、在拼点补焊区8、外环缝焊接区9、人工修磨补焊区10及交库区11设置第三桁架机器人3,所述第三桁架机器人3将工件依次从拼点补焊区8、外环缝焊接区9、人工修磨补焊区10输送至交库区11。应当理解,所述第二桁架机器人2、第三桁架机器人3都可以在拼点补焊区8进行移动。
27.具体地,第三桁架机器人3在拼点补焊区8下料后,将工件输送至外环缝焊接区9,作为一种优选实施方式,所述外环缝焊接区9设有四个工位,相应地,所述第三桁架机器人3将工件输送至相应工位上,以完成预制筒体的外环缝焊接,待预制筒体的外环缝焊接后,所述第三桁架机器人3将筒体下料,并输送至人工修磨补焊区10。
28.为了对筒体的焊缝进行检测、修补,所述第三桁架机器人3将筒体上料至人工修磨补焊区10的工位上,详细地,所述人工修磨补焊区10设有三个工位,可同时对三个筒体的焊缝进行检测、修补。当杜筒体的焊缝检测、修补后,第三桁架机器人3将筒体从工位上取下,并输送至筒体的交库区11,需要说明的是,所述第一桁架机器人1、第二桁架机器人2、第三桁架机器人3设于同一轨道上,从而使得厂房利用率提高,避免浪费厂房空间。
29.本发明提供的搅拌车筒体全自动工艺流转方法,合理地规划了搅拌车筒体各生产工序布局,并通过所述第一桁架机器人1、第二桁架机器人2、第三桁架机器人3之间的相互配合,将工件依次从内环缝焊接区4输送至叶片拼点区5、叶片螺旋焊缝区6、前锥组件与后锥组件合体区7、拼点补焊区8、外环缝焊接区9、人工修磨补焊区10输送至交库区11,完成各区工件的上下料,实现搅拌车筒体全自动流转,以提高生产效率。
30.为了进一步提高生产效率,本发明通过在内环缝焊接区4、叶片拼点区5、叶片螺旋焊缝区6等工序区设置多个工位,能够在同一工序区进行多个工件处理。
31.通过将所述第一桁架机器人1、第二桁架机器人2、第三桁架机器人3的吊装机构设于工件上方,能够避免转运通道使用,进而提高厂房利用率。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。