1.本发明涉及电刺激领域,具体是假肢腕肘关节仿生型本体觉重建方法。
背景技术:
2.截肢患者安装假肢后,无法使用假肢进行灵巧运动。只有恢复了感觉功能,才能动态地调节对假肢的控制,进而实现精确运动。
3.现在仿生型本体觉的干预方式分为侵入式和非侵入式两种。
4.侵入式干预方法通常使用利用微电极电刺激尺神经和正中神经的感觉轴突能成功诱发手上不同质量、空间分辨率的感觉,整合到假肢中。其优势是诱发的人工感觉分辨率高,感官感知的数量多。利用横向神经束间多通道电极能激活正中神经和尺神经的感觉纤维,给假手手指提供力的感觉反馈。通过在两名截肢受试者的外周神经植入袖带电极,通过给残肢的外周神经施加电刺激,可重复性地稳定诱发感觉,被试能感受到“幻手”的不同位置被刺激,并且能使截肢者“感受”到假肢手的不同类型感觉,包括敲击、压力、轻触、振动。在众多植入电极中,仿生型本体觉恢复效果很好的是犹他倾斜电极阵列(utah slanted electrode array,usea),因为它曾使截肢者感受到多达81种感官感知。davis等人把usea植入上肢的神经,在恢复运动功能同时提供了感觉反馈,但缺点为有创伤、植入电极的长期使用稳定性不佳等。而且,这类实验结果受到有限植入时长的制约,并且残肢志愿者的征集困难大。
5.而非侵入式方法通过牺牲刺激的精度,降低了临床实验的难度,更容易推广。目前常见的非侵入式方法都旨在恢复手指仿生型本体觉,基本针对腕部肘部仿生型本体觉恢复的方案。但人体手部动作时往往会连同腕关节甚至是肘关节一起发力,腕肘关节感觉对于灵巧运动至关重要。传统非侵入式方法都忽略了这一点。
6.传统感觉编码机制是通过单纯调节刺激强度来传递假肢的力学或压力传感器的输出,其方案包括:1)选择假手拇指指尖和食指指尖的间距,即手孔大小,来表征假手关节的空间位置。并且选择将手孔大小编码为机械振动刺激的强度来反馈假手关节空间位置。2)将机械手传感器采集到的传感器信号按强弱分的等级转换成人体可识别的电刺激强度,将该电刺激施加到人体肢体,从而诱发被试产生线性的感受强度。然而,上述线性编码方式都很生硬,忽略了仿生型本体觉感觉反馈的规律。
7.现有技术主要是利用人体自身的仿生型本体觉感受器或平板电脑,通过执行肌肉力量任务,研究仿生型本体觉功能的恢复,或者通过肌电信号和躯体感觉诱发电位,来测量关节的仿生型本体觉感觉信息,大多存在以下问题:
8.1)目前大多数实验室研究有创的干预方式,需要神经肌肉
‑
电极接口装置植入到截肢患者的残肢,才能够记录传出运动信号来控制假肢,同时可以刺激残肢的感觉神经纤维,恢复截肢患者的肢体感觉。
9.2)目前假肢感觉反馈的方法仍然很原始。大多数现存的感觉编码机制通过调节刺激强度来跟踪假肢位置、运动状态监测传感器的输出,忽略了自然感觉反馈的重要方面。
技术实现要素:
10.本发明的目的是提供假肢腕肘关节仿生型本体觉重建的方法,包括以下步骤:
11.1)在使用者肢体上贴覆n个刺激电极。所述肢体安装有假肢。所述假肢内置有电机编码器。所述电机编码器监测假肢的运动姿态信息,并发送至微控制器。
12.所述运动姿态信息包括腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜、桡侧偏斜、肘部屈、肘部伸、肘部旋前、肘部旋后。
13.当运动姿态信息为腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜或桡侧偏斜时,微控制器输出一组电刺激,经多个刺激电极作用于桡腕伸肌、桡腕屈肌、外展肌、内收肌;
14.当运动姿态信息为肘部屈、肘部伸、肘部旋前或肘部旋后时,微控制器输出一组电刺激,经多个刺激电极作用于肱二头肌、肱三头肌、肱桡肌、旋前圆肌、指伸肌。
15.2)所述微控制器实时读取假肢的运动姿态信息。
16.3)所述微控制器对运动姿态信息进行处理,确定电刺激脉冲时序。所述电刺激脉冲时序包括m个刺激电极产生刺激信号的顺序和间隔时间。m≤n。
17.微控制器根据腕关节运动时肌肉群的多通道肌梭传入纤维的神经发放时序确定电刺激脉冲时序。
18.4)基于电刺激脉冲时序,所述微控制器分别向m个脉冲通道发送电压脉冲信号。其中,第j个电压脉冲信号记为v
1j
。j=1、2、3
…
m。
19.5)每个脉冲通道包括压控恒流源电路和单极性转双极性电路。其中,第j个脉冲通道的压控恒流源电路接收和处理电压脉冲信号v
1j
,得到单相恒定电流脉冲信号i
1j
,并传输至该脉冲通道的单极性转双极性电路。
20.所述单极性转双极性电路接收和处理单相恒定电流脉冲信号i
1j
,并输出双相恒定脉冲电流信号i
2j
。
21.所述双相恒定脉冲电流信号i
2i
为先负后正的双相电流脉冲信号,该信号刺激的电流范围是0.1~2ma,频率范围0.5~350hz,脉宽范围0.1~1ms。
22.电压脉冲信号v
1i
、双相恒定脉冲电流信号i
2i
的幅值、脉宽、频率可调。
23.刺激电极接收到双相恒定脉冲电流信号i
2i
后,产生作用于使用者肢体神经的电刺激。
24.输入相邻两个刺激电极的双相恒定脉冲电流信号分别记为i
2j
、i
2(j 1)
。双相恒定脉冲电流信号i
2i
、双相恒定脉冲电流信号i
2(i 1)
的电流幅值分别为i
2j
=αi和i
2(j 1)
=(1
‑
α)i。α为定向电流系数。定向电流系数α可调。
25.6)刺激电极接收到双相恒定脉冲电流信号i
2j
后,产生作用于使用者肢体的电刺激脉冲信号。
26.7)在使用者肢体受到电刺激后,微控制器监测残肢肌肉收缩程度。
27.所述微控制器根据残肢肌肉收缩程度调节所述电压脉冲信号的参数,并返回步骤5),直至当前动作完成;当前动作完成后返回步骤1)。
28.所述微控制器根据残肢肌肉收缩程度调节所述电压脉冲信号的参数的步骤包括:
29.7.1)利用角度传感器监测腕肘关节运动角度;
30.7.2)建立腕部、肘部肌肉运动模型,并基于腕部、肘部肌肉运动模型确定运动中肌肉长度随着关节角度变化的关系方程;
31.7.3)将腕肘关节运动角度输入到运动中肌肉长度随着关节角度变化的关系方程中,得到肌肉长度;
32.7.4)基于肌肉长度,确定电刺激脉冲信号的参数。
33.所述电刺激脉冲信号的参数包括刺激ia型神经纤维和ii型神经纤维的电刺激频率;所述ia型神经纤维和ii型神经纤维为支配骨骼肌中仿生型本体觉感受器的神经纤维;所述仿生型本体觉感受器包括肌梭和腱器官;
34.其中,刺激ia型神经纤维的电刺激频率r1如下所示:
[0035][0036][0037][0038]
式中,k
11
为肌肉长度的权重,h为当前刺激肌肉的长度;k
12
为长度变化率的权重;dh/dt为选定肌肉的长度随时间的变化率;k0为肌肉伸长/缩短时不同模式的系数;
[0039]
刺激ii型神经纤维的电刺激频率r2如下所示:
[0040][0041]
式中,k
21
为肌肉长度的权重;h为当前刺激肌肉的长度;k
22
为长度变化率的权重,dh/dt为选定肌肉的长度随时间的变化率。
[0042]
所述微控制器存储有真实残肢肌肉收缩程度范围。当残肢肌肉收缩程度不在真实残肢肌肉收缩程度范围内,则微控制器发出报警信号。
[0043]
所述微控制器存储有不同运动姿态下的残肢肌肉收缩程度阈值。若残肢肌肉收缩程度小于当前运动姿态下的残肢肌肉收缩程度阈值,则微控制器提高刺激强度,反之,微控制器降低刺激强度。
[0044]
本发明的技术效果是毋庸置疑的,本发明目标人群为使用假肢的截肢患者,本发明使用仿生学的本体感觉神经元激活的自然模式,使诱发的人工感觉更贴近自然感觉,同时,采用非植入式的外周残余神经电刺激,以降低对实验被试的损伤。为了提高感觉神经皮质分支电刺激的分辨率,本发明采用高精度刺激电极阵列,并利用定向电流刺激技术来提高有效电刺激的分辨率,使用隔离的多通道电刺激系统进行电刺激。本发明可以尽可能地恢复使用者的仿生型本体觉,协助使用者动态地调节对假肢的控制,进而实现精确运动。
附图说明
[0045]
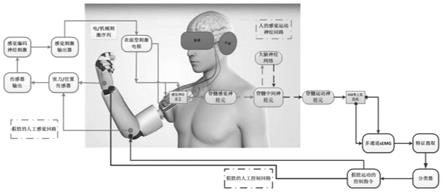
图1为恢复假肢的人工仿生型本体觉的外周神经刺激系统的功能示意图;
[0046]
图2为假肢仿生型本体觉重建的刺激方法;
[0047]
图3为带有便携式刺激器的假肢手示意图;
[0048]
图4为机械手依次做腕屈、腕伸动作时,刺激器输出的电刺激脉冲波形示意图;
[0049]
图5为骨骼肌纤维长度变化与不同传入纤维的神经发放示意图
[0050]
图6为感觉诱发电刺激的仿生型编码的流程;
[0051]
图7为运动模式示意图;图7(a)为腕伸、腕屈示意图;图7(b)为腕旋前、旋后示意图;图7(c)为尺侧偏斜、桡侧偏斜示意图;图7(d)为肘部的屈、伸示意图;图7(e)为肘部的旋前、旋后示意图;
[0052]
图8为带反馈的感觉回路多通道电刺激器示意图;
[0053]
图9为诱发腕关节幻动四个方向肌肉群的刺激电极脉冲频率示意图;
[0054]
图中,假肢1、微控制器2、刺激电极3、接触腔4。
具体实施方式
[0055]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0056]
实施例1:
[0057]
参见图1至图7、图9,假肢腕肘关节仿生型本体觉重建的方法,包括以下步骤:
[0058]
1)如图3所示,在使用者肢体上贴覆n个刺激电极3。所述肢体安装有假肢1,连接处为接触腔4。
[0059]
所述假肢1内置有电机编码器或角度传感器。所述电机编码器监测假肢1的运动姿态信息,并发送至微控制器2。
[0060]
所述运动姿态信息包括腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜、桡侧偏斜、肘部屈、肘部伸、肘部旋前、肘部旋后。
[0061]
当运动姿态信息为腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜或桡侧偏斜时,刺激电极产生作用于桡腕伸肌、桡腕屈肌、外展肌、内收肌的电刺激;
[0062]
当运动姿态信息为肘部屈、肘部伸、肘部旋前或肘部旋后时,刺激电极产生作用于肱二头肌、肱三头肌、肱桡肌、旋前圆肌、指伸肌的电刺激。
[0063]
2)所述微控制器2实时读取假肢1的运动姿态信息。
[0064]
3)所述微控制器2对运动姿态信息进行处理,确定电刺激脉冲时序。所述电刺激脉冲时序包括m个刺激电极3产生刺激信号的顺序和间隔时间。m≤n。
[0065]
微控制器2根据腕关节运动时主要肌肉群的多通道肌梭传入纤维的神经发放时序确定电刺激脉冲时序。例如,腕屈时,主要肌肉是桡侧腕屈肌(fcr),腕伸时,主要肌肉是长伸肌(edl)。多个电极的工作时序,可以参考腕关节和肘关节虚拟二维运动的多通道肌梭传入纤维的神经发放时序图。
[0066]
在压力相同的垂直地的肌腱的右手腕关节的肌肉群上固定四个刺激电极。单个刺激电极为圆形贴片电极,直径为0.6cm,刺激电极连接到微控制器输出的单极性转双极性电路
[0067]
当机械手依次做腕屈、腕伸动作时,刺激器会依照健侧腕伸、腕屈时腕伸方向、腕屈方向上肌肉群的肌梭传入纤维放电速率的时序,输出具有类似趋势的电刺激脉冲波形,并令刺激电极对肌肉、神经进行刺激。
[0068]
4)基于电刺激脉冲时序,所述微控制器2分别向m个脉冲通道发送电压脉冲信号。其中,第j个电压脉冲信号记为v
1j
。j=1、2、3
…
m。
[0069]
5)每个脉冲通道包括压控恒流源电路和单极性转双极性电路。其中,第j个脉冲通
道的压控恒流源电路接收和处理电压脉冲信号v
1j
,得到单相恒定电流脉冲信号i
1j
,并传输至该脉冲通道的单极性转双极性电路。
[0070]
所述单极性转双极性电路接收和处理单相恒定电流脉冲信号i
1j
,并输出双相恒定脉冲电流信号i
2j
。
[0071]
所述双相恒定脉冲电流信号i
2i
为先负后正的双相电流脉冲信号,该信号刺激的电流范围是0.1~2ma,频率范围0.5~350hz,脉宽范围0.1~1ms。
[0072]
电压脉冲信号v
1i
、双相恒定脉冲电流信号i
2i
的幅值、脉宽、频率可调。
[0073]
刺激电极3接收到双相恒定脉冲电流信号i
2i
后,产生作用于使用者肢体神经的电刺激。
[0074]
输入相邻两个刺激电极3的双相恒定脉冲电流信号分别记为i
2j
、i
2(j 1)
。双相恒定脉冲电流信号i
2i
、双相恒定脉冲电流信号i
2(i 1)
的电流幅值分别为i
2j
=αi和i
2(j 1)
=(1
‑
α)i。α为定向电流系数。定向电流系数α可调。
[0075]
6)刺激电极3接收到双相恒定脉冲电流信号i
2j
后,产生作用于使用者肢体的电刺激。
[0076]
7)在使用者肢体受到电刺激后,微控制器2监测残肢肌肉收缩程度。
[0077]
残肢肌肉收缩程度的检测指标包括关节角度、肌肉长度。用一个角度传感器,检测腕肘关节运动的角度。将上述关节角度输入到一个关节角度与肌肉长度之间的经验换算公式,可以换算出肌肉的长度。微控制器接收到残肢肌肉感收缩程度的关节角度数值,肌肉长度数值,根据一定的编码算法,得到一套刺激参数可调的电刺激脉冲信号。
[0078]
所述微控制器2根据残肢肌肉收缩程度调节所述电压脉冲信号的参数,并返回步骤5),直至当前动作完成;当前动作完成后返回步骤1)。
[0079]
所述微控制器根据残肢肌肉收缩程度调节所述电压脉冲信号的参数的步骤包括:
[0080]
7.1)利用角度传感器监测腕肘关节运动角度;
[0081]
7.2)建立腕部、肘部肌肉运动模型,并基于腕部、肘部肌肉运动模型确定运动中肌肉长度随着关节角度变化的关系方程;所述腕部、肘部肌肉运动模型为opensim仿真软件中包含的腕部(wrist)和肘部(elbow)肌肉运动模型。运动中肌肉长度随着关节角度变化的关系方程由opensim仿真软件绘制运动中肌肉长度随着关节角度变化曲线得到。
[0082]
7.3)将腕肘关节运动角度输入到运动中肌肉长度随着关节角度变化的关系方程中,得到肌肉长度;
[0083]
7.4)基于肌肉长度,确定电刺激脉冲信号的参数。
[0084]
所述电刺激脉冲信号的参数包括刺激ia型神经纤维和ii型神经纤维的电刺激频率;所述ia型神经纤维和ii型神经纤维为支配骨骼肌中仿生型本体觉感受器的神经纤维;所述仿生型本体觉感受器包括肌梭和腱器官;
[0085]
其中,刺激ia型神经纤维的电刺激频率r1如下所示:
[0086][0087]
[0088][0089]
式中,k
11
为肌肉长度的权重,h为当前刺激肌肉的长度;k
12
为长度变化率的权重;dh/dt为选定肌肉的长度随时间的变化率;k0为肌肉伸长/缩短时不同模式的系数;
[0090]
刺激ii型神经纤维的电刺激频率r2如下所示:
[0091][0092]
式中,k
21
为肌肉长度的权重;h为当前刺激肌肉的长度;k
22
为长度变化率的权重,dh/dt为选定肌肉的长度随时间的变化率。
[0093]
所述微控制器2存储有真实残肢肌肉收缩程度范围。当残肢肌肉收缩程度不在真实残肢肌肉收缩程度范围内,则微控制器2发出报警信号。
[0094]
所述微控制器2存储有不同运动姿态下的残肢肌肉收缩程度阈值。若残肢肌肉收缩程度小于当前运动姿态下的残肢肌肉收缩程度阈值,则微控制器2提高刺激强度,反之,微控制器2降低刺激强度。
[0095]
实施例2:
[0096]
参见图8,假肢腕肘关节仿生型本体觉重建方法的评估实验,包括以下步骤:
[0097]
1),在使用者肢体上贴覆n个刺激电极3。所述肢体安装有假肢1,连接处为接触腔4。在使用者头部贴置脑电信号监测电极,用于实时监测使用者脑电信号。脑电信号只用于评估假肢腕肘关节仿生型本体觉重建方法,不参与假肢腕肘关节仿生型本体觉重建。
[0098]
所述假肢1内置有电机编码器或角度传感器。所述电机编码器监测假肢1的运动姿态信息,并发送至微控制器2。
[0099]
所述运动姿态信息包括腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜、桡侧偏斜、肘部屈、肘部伸、肘部旋前、肘部旋后。
[0100]
2)所述脑电信号监测电极监测脑电信号,并发送至微控制器2。所述微控制器2实时读取假肢1的运动姿态信息。
[0101]
3)所述微控制器2对运动姿态信息进行处理,确定电刺激脉冲时序。所述电刺激脉冲时序包括m个刺激电极3产生刺激信号的顺序和间隔时间。m≤n。
[0102]
微控制器2根据腕关节运动时主要肌肉群的多通道肌梭传入纤维的神经发放时序确定电刺激脉冲时序。
[0103]
4)基于电刺激脉冲时序,所述微控制器2分别向m个脉冲通道发送电压脉冲信号。其中,第j个电压脉冲信号记为v
1j
。j=1、2、3
…
m。
[0104]
5)每个脉冲通道包括压控恒流源电路和单极性转双极性电路。其中,第j个脉冲通道的压控恒流源电路接收和处理电压脉冲信号v
1j
,得到单相恒定电流脉冲信号i
1j
,并传输至该脉冲通道的单极性转双极性电路。
[0105]
所述单极性转双极性电路接收和处理单相恒定电流脉冲信号i
1j
,并输出双相恒定脉冲电流信号i
2j
。
[0106]
所述双相恒定脉冲电流信号i
2i
为先负后正的双相电流脉冲信号,该信号刺激的电流范围是0.1~2ma,频率范围0.5~350hz,脉宽范围0.1~1ms。
[0107]
电压脉冲信号v
1i
、双相恒定脉冲电流信号i
2i
的幅值、脉宽、频率可调。
[0108]
刺激电极3接收到双相恒定脉冲电流信号i
2i
后,产生作用于使用者肢体神经的电刺激。
[0109]
输入相邻两个刺激电极3的双相恒定脉冲电流信号分别记为i
2j
、i
2(j 1)
。双相恒定脉冲电流信号i
2i
、双相恒定脉冲电流信号i
2(i 1)
的电流幅值分别为i
2j
=αi和i
2(j 1)
=(1
‑
α)i。α为定向电流系数。定向电流系数α可调。
[0110]
6)刺激电极3接收到双相恒定脉冲电流信号i
2j
后,产生作用于使用者肢体的电刺激。
[0111]
7)在使用者肢体受到电刺激后,微控制器2监测残肢肌肉收缩程度。
[0112]
所述微控制器2对残肢肌肉收缩程度和脑电信号进行评估,判断电刺激参数是否合适。
[0113]
实施例3:
[0114]
参见图1至图8,假肢腕肘关节仿生型本体觉重建系统,包括集成的刺激电极、微处理器、压控恒流源电路、单极性转双极性电路、用于供电的电池;
[0115]
使用者肢体佩戴假肢腕肘关节仿生型本体觉重建系统,其中,刺激电极与使用者肢体相接触。
[0116]
所述肢体安装有假肢。
[0117]
所述假肢内置有电机编码器。所述电机编码器监测假肢的运动姿态信息,并发送至微控制器。
[0118]
所述运动姿态信息包括腕伸、腕屈、腕旋前、腕旋后、尺侧偏斜、桡侧偏斜、肘部屈、肘部伸、肘部旋前、肘部旋后。
[0119]
所述微控制器实时读取假肢的运动姿态信息。
[0120]
所述微控制器对运动姿态信息进行处理,确定电刺激脉冲时序。所述电刺激脉冲时序包括m个刺激电极产生刺激信号的顺序和间隔时间。m≤n。
[0121]
微控制器根据腕关节运动时主要肌肉群的多通道肌梭传入纤维的神经发放时序确定电刺激脉冲时序。
[0122]
基于电刺激脉冲时序,所述微控制器分别向m个脉冲通道发送电压脉冲信号。其中,第j个电压脉冲信号记为v
1j
。j=1、2、3
…
m。
[0123]
每个脉冲通道包括压控恒流源电路和单极性转双极性电路。其中,第j个脉冲通道的压控恒流源电路接收和处理电压脉冲信号v
1j
,得到单相恒定电流脉冲信号i
1j
,并传输至该脉冲通道的单极性转双极性电路。
[0124]
所述单极性转双极性电路接收和处理单相恒定电流脉冲信号i
1j
,并输出双相恒定脉冲电流信号i
2j
。
[0125]
所述双相恒定脉冲电流信号i
2i
为先负后正的双相电流脉冲信号,该信号刺激的电流范围是0.1~2ma,频率范围0.5~350hz,脉宽范围0.1~1ms。
[0126]
电压脉冲信号v
1i
、双相恒定脉冲电流信号i
2i
的幅值、脉宽、频率可调。
[0127]
刺激电极接收到双相恒定脉冲电流信号i
2i
后,产生作用于使用者肢体神经的电刺激。
[0128]
输入相邻两个刺激电极的双相恒定脉冲电流信号分别记为i
2j
、i
2(j 1)
。双相恒定脉冲电流信号i
2i
、双相恒定脉冲电流信号i
2(i 1)
的电流幅值分别为i
2j
=αi和i
2(j 1)
=(1
‑
α)i。
α为定向电流系数。定向电流系数α可调。
[0129]
刺激电极接收到双相恒定脉冲电流信号i
2j
后,产生作用于使用者肢体的电刺激。
[0130]
在使用者肢体受到电刺激后,微控制器监测残肢肌肉收缩程度。
[0131]
残肢肌肉收缩程度的检测指标包括关节角度、肌肉长度。用一个角度传感器,检测腕肘关节运动的角度。将上述关节角度输入到一个关节角度与肌肉长度之间的经验换算公式,可以换算出肌肉的长度。微控制器接收到残肢肌肉感收缩程度的关节角度数值,肌肉长度数值,根据一定的编码算法,得到一套刺激参数可调的电刺激脉冲信号。
[0132]
所述微控制器根据残肢肌肉收缩程度调节所述电压脉冲信号的参数。
[0133]
所述微控制器存储有真实残肢肌肉收缩程度范围。当残肢肌肉收缩程度不在真实残肢肌肉收缩程度范围内,则微控制器发出报警信号。
[0134]
所述微控制器存储有不同运动姿态下的残肢肌肉收缩程度阈值。若残肢肌肉收缩程度小于当前运动姿态下的残肢肌肉收缩程度阈值,则微控制器提高刺激强度,反之,微控制器降低刺激强度。
[0135]
实施例3:
[0136]
一种刺激外周本体感觉神经,诱发假肢使用者产生对假肢腕肘关节的位置、方向、速度、运动幅度的假肢腕肘关节仿生型本体觉重建方法,主要内容如下:
[0137]
首先,把假肢的运动学参数编码为感觉回路的一种人为的干预模式,施加到假肢使用者的肢体。然后,被试残存的感觉回路被激活,诱发仿生型本体觉,研究者向被试询问他感受到的肢体仿生型本体觉信息。被试根据仿生型本体觉感受,调节残肢拮抗肌肉的收缩强度;假肢的肌电采集电极采集到一对拮抗肌运动的电信号,用来控制假肢的某一自由度运动。
[0138]
本实施例选择便携型非植入式刺激系统,主要目的为降低创伤,但必然面临刺激分辨率低的问题。因此,重点研究如何提高本体感觉纤维的刺激接近自然本体觉感受的效率。
[0139]
在某种程度上,人工诱导的感觉信号模仿自然信号,会引起更多的接近自然本体觉感受的感知,并赋予用户更大的灵活性。
[0140]
仿生学感觉编码包括以下内容:
[0141]
1)假肢运动控制:
[0142]
常规假肢手的三个自由度包括手开合、腕屈伸、腕旋转。上肢腕肘关节的运动包括五种,腕部的屈曲/伸展、尺/桡侧偏斜和手腕的旋前/旋后,肘部的屈伸,旋前和旋后。
[0143]
假肢使用者使用残肢肌肉驱动假肢运动时,利用多通道表面电极,在残肢前臂拮抗肌肉多个位置采集多通道semg信号,生成分类特征向量。计算信号方差、fft的高低项以及前半部分和后半部分窗样本的振幅差作为分类特征。这些信号由多层感知器(mlp)网络处理,该网络为每个可能的手部运动提供一个输出节点,另外一个节点用于静止状态。在在线分类过程中,利用隐马尔可夫模型(hmm)滤波对mlp输出可能产生的抖振进行平滑处理。对产生的动作进行解码。训练好的解码算法的输出被用来为受试者提供假肢手的位置的实时控制。
[0144]
2)假肢人工感觉电刺激编码算法:
[0145]
本装置从动态和静态两个角度对仿生型本体觉进行编码,(插入骨骼肌运动神经
和感觉神经示意图)。一块骨骼肌中的仿生型本体觉感受器包含肌梭和腱器官,支配的感觉神经纤维有ia、ⅰb和ii型传入神经纤维。ia型神经纤维由骨骼肌的肌腱器官延伸至脊髓后角,与肌肉长度和长度变化率都有关,ii型神经纤维对肌肉长度有很强的敏感性,但对肌肉长度的变化率敏感性不高,ib型传入纤维由肌腱中的高尔基腱器官延伸至脊髓后角,主要与肌肉感受的力相关,因此本专利中不做研究。
[0146]
本装置使用仿生学的本体感觉神经元激活的自然模式,使诱发的人工感觉更贴近自然感觉。与仿生型本体觉相关的运动学参数是关节的位置、速度等。我们通过一种感官反馈算法,以体现这种自然仿生型本体觉信号的时间特性。编码后的刺激强度不仅考虑施加的运动的某些参数,而且还应该考虑参数随时间的变化速率(导数),如在位置改变开始时产生更强的刺激,此时变化率最高,以模拟在位置改变瞬变过程中观察到的自然神经激活的相位爆发。
[0147]
仿生感官编码:对于两种神经纤维,电刺激频率与角度传感器的输出和其正变化率都有一定关联,不同之处在于,一块肌肉伸长的过程中,ia型神经的发放变化率(动态)占主要因素,长度(静态)占次要因素;在缩短过程中,ia型神经的发放维持在一个较低的水平,具体数学关系如下式所示:
[0148][0149]
k0=1,
[0150]
k0=0.1,
[0151]
式中r1为ia神经纤维发放速率,对应电刺激频率(刺激脉冲个数/秒),k11为长度(静态)的权重,h为当前刺激肌肉的长度,k12为长度变化率(动态)的权重,dh/dt为选定肌肉的长度随时间的变化率,k0为肌肉伸长/缩短时不同模式的系数。
[0152]
一块ii型神经的发放中,肌肉长度(静态)占主要因素,发放变化率(动态)占次要因素
[0153]
具体数学关系如下式所示:
[0154][0155]
式中r2为ii神经纤维发放速率,对应电刺激频率(刺激脉冲个数/秒),k21为长度(静态)的权重,h为当前刺激肌肉的长度,k22为长度变化率(动态)的权重,dh/dt为选定肌肉的长度随时间的变化率。
[0156]
刺激电极位置确定:
[0157]
本装置将刺激电极放置在残肢端,刺激感觉神经在皮肤的分支,通过表面高密度阵列电极的刺激通常会诱发具有不同感受野的单一知觉,寻找诱发腕部/肘部肌肉关节本体感觉的刺激点。少数情况下刺激一个皮肤表面电极会在不同的感受野中唤起多个知觉;这些具有多个不同知觉的电极不用于实时感觉反馈。
[0158]
然后将清晰的诱发知觉分配到假肢上具有相应感受野的单个接触(皮肤)或运动
(本体感觉)传感器。例如,如果通过表面电极x的刺激在腕部上诱发类似本体的知觉,并且如果通过表面电极y单独刺激也在腕部上诱发知觉,那么x和y两个电极都将被分配给假肢上的腕部本体传感器。我们需要刺激了1到12个表面电极,这些电极与假体上给定的传感器有重叠的感受野。由于分配所有电极的时间密集性,假体上的传感器子集用于每个任务。传感器的激活导致双相、电荷平衡刺激(200或320ms相持续时间,阴极优先,100ms相间持续时间)。
[0159]
下表为电刺激诱发腕肘部5种运动模式的主要潜在刺激位点,根据截肢患者的具体情况,如截肢位置、肌肉萎缩程度等,选择合适的肌肉进行电刺激,刺激的位点为肌肉的肌腹。
[0160]
表1电刺激诱发腕肘部5种运动模式及主要潜在刺激位点
[0161][0162]
人工感觉反馈改善了精细运动控制,并赋予使用者通过仿生手感知自由上肢关节运动的能力。此外,当感觉反馈被设计成模仿神经系统的自然语言时,这些人工感觉体验会得到丰富。通过捕捉自然本体感觉信号的一些基本特征,仿生刺激提高了感官反馈的直观性和信息性,这一点可以通过更快的关节运动识别能力得到证明。
[0163]
感觉神经皮肤分支电刺激干预:
[0164]
本设计采用非植入式的外周残余神经电刺激,以降低对实验被试的伤害。为了提高感觉神经皮质分支电刺激的分辨率,本设计采用高精度刺激电极阵列,同时利用定向电流刺激技术来提高有效电刺激的分辨率,并使用隔离的多通道电刺激系统进行电刺激。
[0165]
实施例4:
[0166]
假肢腕肘关节仿生型本体觉重建方法,主要内容如下:
[0167]
1)搭建假肢腕肘关节仿生型本体觉重建系统,包括上位机、微控制器、压控恒流源电路、单极性转双极性电路、刺激电极。其中,上位机仅在适配阶段使用,肌电假肢佩戴时不需使用。刺激电极的6个通道是独立关系,也可以任意组合。
[0168]
2)参数调节:
[0169]
a)单通道输出单个先负后正的双相电流脉冲,刺激的电流范围是0.1~2ma,频率范围0.5~350hz,脉宽范围0.1~1ms。单通道的幅值、脉宽、频率可调节;
[0170]
b)两个通道之间的定向系数可调节。微控制器通过编程实现多路输入电压脉冲信号v
1i
(i=1、2、3
…
n)的幅值可调节,输出多路电压脉冲信号v
2i
(i=1、2、3
…
n),通过压控恒流源电路输出单相恒定电流脉冲信号i
1i
(i=1、2、3
…
n),再通过单极性转双极性电路输出
双相恒定脉冲电流信号i
2i
(i=1、2、3
…
n)。假设在具有仿生型本体觉反馈的假肢中,贴附于上肢残值的两个微电极上的输入脉冲电流的幅值分别是i1=αi和i2=(1
‑
α)i,其中定向系数α(0≤α≤1)通常指相邻两个电极上的刺激电流强度的比例系数,i为两个微电极上的电流之和,即i=i
11
i
12
。如图所示,定向系数α可调,取值范围是0,0.1,0.2,0.3,0.4,0.5。可以通过上位机来选择输出脉冲的定向电流系数α、频率、脉宽、幅值等参数。当α=0.6,0.7,0.8,0.9,1.0时,虚拟通道的位置变化规律与α=0,0.1,0.2,0.3,0.4时类似,只是在相邻两电极间的水平位置是以两电极中心点的两侧;
[0171]
c)多个通道间的时序关系可调节。可以依据腕关节特定运动时的主要肌肉群的多通道肌梭传入纤维的神经发放时序,依据第一套编码方案,给多个电刺激通道设计电刺激脉冲时序,来诱发被试产生幻肢幻动的感觉。
[0172]
3)该多通道电刺激器的参数调节是依据感觉回路的生理信号监测结果来进行调节的。在感觉回路电刺激信号施加到假肢患者的残肢皮肤上后,对残肢肌肉收缩进行检测,根据腕肘关节特定运动模式在感觉回路引发的响应进行特征提取后,依据假肢被试产生的感觉响应客观指标,经过统计分析设置阈值:
[0173]
a)如果实际感觉响应特征与真实运动学特征不符合时,检查刺激电极是否脱落,刺激位置是否准确;
[0174]
b)如果实际感觉响应特征如果大于阈值,则上位机应该降低刺激强度。如果实际感觉响应特征小于阈值,则上位机应该继续提高刺激强度。
[0175]
实施例5:
[0176]
假肢腕肘关节仿生型本体觉重建方法,主要内容见实施例4,其中,刺激阈值测定的方法如下:
[0177]
在第1、2、3和4周收集被试的充分使用刺激阈值图。在这些图谱中,通过刺激每个电极来激发感觉所需的阈值电流(μa)被确定。阈值被定义为受试者反复感知刺激诱发知觉的最低电流水平。对于这些映射,双相,200μs的刺激脉冲(相间间隔100μs)通过单电极以200hz的频率发送,持续时间为200ms(200hz频率是根据受试者快速达到阈值的能力根据经验选择的)。刺激训练可以由实验者启动,也可以由受试者通过点击鼠标按钮自行启动。
[0178]
实施例6:
[0179]
假肢腕肘关节仿生型本体觉重建方法的验证试验,内容如下;
[0180]
当用高密度表面电极阵列刺激诱发知觉时,受试者使用个性化手臂腕肘关节图像中,标记出感知到的腕肘关节位置、质量、强度或大小。要求受试者从一系列描述词中选择感知质量(如“刺痛”,“振动”,“压力”,“运动”,“热”,“冷”),或根据需要创建和使用他们自己的描述词。
[0181]
为了验证上述感觉编码与经皮电刺激方式的有效性,我们还设置了电刺激感觉的时间稳定性实验。具体地说,我们根据每个高密度表面电极阵列的电极百分比量化每个高密度表面电极阵列的感知稳定性,在两个连续的高密度表面电极阵列阈值映射任务之间,诱发感知改变了位置或质量。在这项分析中,知觉位置的变化被定义为5种手部位置类别中的任何一种(腕部的屈曲/伸展、尺/桡侧偏斜和手腕的旋前/旋后,肘部的屈伸,旋前和旋后。)之间的过渡。感知质量的变化被定义为所选感知质量描述符之间的转换。我们计算了每周感知质量或位置发生变化的电极数的跨周平均值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。