1.本发明涉及水面无人艇指挥调度领域,特别是涉及一种无人艇复合任务分配方法及系统。
背景技术:
2.探索新型无人艇集群自主控制技术,建设作业范围广、作业效率高、抗风险和容错能力强的无人艇集群智能指挥系统,提升了无人艇集群对区域探索、舰队拦截入侵和打击的实时性、异步性、准确性、高效性,具有深远的意义。任务分配作为无人艇集群智能指挥系统决策环节中关键的一环,准确、高效的任务决策分配直接影响整个指挥系统性能的优劣,研究对无人艇集群区域探索、舰队拦截入侵和打击任务分配的方法,为无人艇集群智能协同系统提供一定的理论成果和技术储备。
3.随着现代科技的不断发展,现代化武器军事系统正在一步步走向模块化、智能化、无人化的方向发展,其中,水面无人艇(usv)作为公认的未来战争重要的作战手之一;usv具备模块化、智能化、无人化等特点,不仅可以在军事场景下用于海上巡逻、扫雷、侦查、监视、目标拦截和打击,还可以用于民用领域,例如海上垃圾的回收清理、水文气象探测、灾害预警、海上搜救等,具备十分广阔的应用前景。在海上的博弈对抗过程中,如何实现高效的任务分配是一个很有挑战性的难题,其难度在于海面动态的环境下,无论是无人艇集群之间的通信还是无人艇和入侵目标的自身状态受海况影响较大,缺乏稳定性。
技术实现要素:
4.本发明的目的是解决上诉现有技术在不稳定的海面环境下对无人艇分布式任务分配存在的缺陷而提供的一种基于异步共识捆绑拍卖算法的无人艇复合任务分配方法及系统。
5.为实现上述目的,本发明提供了如下方案:
6.一种无人艇复合任务分配方法,包括:
7.对严格双艇合作复合任务进行分解,得到第一子任务和第二子任务;无人艇集群中无人艇包括区域探测无人艇和目标打击无人艇;所述第一子任务由所述区域探测无人艇执行,所述第二子任务由所述目标打击无人艇执行;所述严格双艇合作复合任务为目标拦截打击任务;
8.基于所述第一子任务、所述第二子任务和区域探测任务,对无人艇集群中各自无人艇进行投标,以构建所述无人艇集群中各个无人艇的捆绑包,继而得到相关信息;所述区域探测任务由所述区域探测无人艇或者所述目标打击无人艇执行;所述相关信息包括:捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表;
9.利用重广播机制,对完成投标的无人艇的捆绑包进行实时的重广播,以共有信息通过所述重广播机制发送给其他无人艇;
10.对于重广播发送完自身信息的无人艇,基于之前收到其他无人艇传来的信息进行
数据共识和重广播机制,以达到所述无人艇集群中各个无人艇的异步共识;
11.当在循环次数阈值内所述中标列表和所述获胜无人艇列表都未改变,任务分配完成。
12.可选的,所述对严格双艇合作复合任务进行分解,得到第一子任务和第二子任务,具体包括:
13.对严格双艇合作复合任务的评分方案score
ikj
进行分解;
14.其中,score
ikj
=∑
j∈rd
∑
i∈i1
∑
k∈i2
(c
ij
x
ij
c
kj
x
kj
)[x
ij
·
x
kj
];
[0015]
rd表示严格双艇合作复合任务,i1表示区域探测无人艇、i2表示目标打击无人艇,c
ij
表示严格双艇合作复合任务j分配给区域探测无人艇i的得分,x
ij
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇i,x
ij
=0表示表示严格双艇合作复合任务j未成功分配给区域探测无人艇i,c
kj
表示严格双艇合作复合任务j分配给区域探测无人艇k的得分,x
kj
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇k,x
kj
=0表示严格双艇合作复合任务j未成功分配给区域探测无人艇k,score
ikj
表示严格双艇合作复合任务j被区域探测无人艇i和目标打击无人艇k共同执行的分数;
[0016]
对于无效分配任务,去除原有分配记录并进行重新分配,即得到第一子任务和第二子任务;所述无效分配任务表示严格双艇合作复合任务j未成功分配给区域探测无人艇i或者严格双艇合作复合任务j未成功分配给区域探测无人艇k。
[0017]
可选的,所述基于所述第一子任务、所述第二子任务和区域探测任务,对无人艇集群中各自无人艇进行投标,以构建所述无人艇集群中各个无人艇的捆绑包,具体包括:
[0018]
基于所述第一子任务、所述第二子任务和区域探测任务,计算每个无人艇的任务初期投标方案得分;
[0019]
将任务初期投标方案得分最高的任务作为对应的无人艇的中标任务;
[0020]
重复上述步骤,直到达到无人艇最大执行任务数量,得到每个无人艇的捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表。
[0021]
可选的,所述对于重广播发送完自身信息的无人艇,基于之前收到其他无人艇传来的信息进行数据共识和重广播机制,以达到所述无人艇集群中各个无人艇的异步共识,具体包括:
[0022]
对于重广播发送完自身信息的无人艇,在共识阶段之前接收到其他无人艇的信息与自身信息进行对比,并根据不同的对比结果采用不同的动作以达到所述无人艇集群中各个无人艇的异步共识;
[0023]
所述动作包括:更新并重播、重置并重播、撇弃并重播、撇弃并不重播、更新时间并重播。
[0024]
可选的,还包括:
[0025]
对于出现故障的无人艇进行捆绑包信息处理,以实现异步重新计划目的。
[0026]
可选的,还包括:
[0027]
在任务执行的过程中,通过区域探测无人艇实时获取的信息更新入侵艇实时信息、执行任务无人艇被敌方击毁或者长时间失去通信,对未完成的任务执行权利要求1所述的一种无人艇复合任务分配方法,实现对动态环境下异步拦截。
[0028]
一种无人艇复合任务分配系统,包括:
[0029]
分解模块,用于对严格双艇合作复合任务进行分解,得到第一子任务和第二子任务;无人艇集群中无人艇包括区域探测无人艇和目标打击无人艇;所述第一子任务由所述区域探测无人艇执行,所述第二子任务由所述目标打击无人艇执行;所述严格双艇合作复合任务为目标拦截打击任务;
[0030]
构建模块,用于基于所述第一子任务、所述第二子任务和区域探测任务,对无人艇集群中各自无人艇进行投标,以构建所述无人艇集群中各个无人艇的捆绑包,继而得到相关信息;所述区域探测任务由所述区域探测无人艇或者所述目标打击无人艇执行;所述相关信息包括:捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表;
[0031]
广播模块,用于利用重广播机制,对完成投标的无人艇的捆绑包进行实时的重广播,以共有信息通过所述重广播机制发送给其他无人艇;
[0032]
异步共识模块,用于对于重广播发送完自身信息的无人艇,基于之前收到其他无人艇传来的信息进行数据共识和重广播机制,以达到所述无人艇集群中各个无人艇的异步共识;
[0033]
任务分配结束模块,用于当在循环次数阈值内所述中标列表和所述获胜无人艇列表都未改变,任务分配完成。
[0034]
可选的,所述分解模块,具体包括:
[0035]
分解单元,用于对严格双艇合作复合任务的评分方案score
ikj
进行分解;
[0036]
其中,score
ikj
=σ
j∈rd
∑
i∈i1
∑
k∈i2
(c
ij
x
ij
c
kj
x
kj
)[x
ij
·
x
kj
];
[0037]
rd表示严格双艇合作复合任务,i1表示区域探测无人艇、i2表示目标打击无人艇,c
ij
表示严格双艇合作复合任务j分配给区域探测无人艇i的得分,x
ij
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇i,x
ij
=0表示表示严格双艇合作复合任务j未成功分配给区域探测无人艇i,c
kj
表示严格双艇合作复合任务j分配给区域探测无人艇k的得分,x
kj
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇k,x
kj
=0表示严格双艇合作复合任务j未成功分配给区域探测无人艇k,score
ikj
表示严格双艇合作复合任务j被区域探测无人艇i和目标打击无人艇k共同执行的分数;
[0038]
重新分配单元,用于对于无效分配任务,去除原有分配记录并进行重新分配,即得到第一子任务和第二子任务;所述无效分配任务表示严格双艇合作复合任务j未成功分配给区域探测无人艇i或者严格双艇合作复合任务j未成功分配给区域探测无人艇k。
[0039]
可选的,所述构建模块,具体包括:
[0040]
得分计算单元,用于基于所述第一子任务、所述第二子任务和区域探测任务,计算每个无人艇的任务初期投标方案得分;
[0041]
中标任务确定单元,用于将任务初期投标方案得分最高的任务作为对应的无人艇的中标任务;
[0042]
构建单元,用于循环得分计算单元和中标任务确定单元,直到达到无人艇最大执行任务数量,得到每个无人艇的捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表。
[0043]
可选的,所述异步共识模块,具体包括:
[0044]
异步共识单元,用于对于重广播发送完自身信息的无人艇,在共识阶段之前接收到其他无人艇的信息与自身信息进行对比,并根据不同的对比结果采用不同的动作以达到
所述无人艇集群中各个无人艇的异步共识;
[0045]
所述动作包括:更新并重播、重置并重播、撇弃并重播、撇弃并不重播、更新时间并重播。
[0046]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0047]
一、本发明通过对捆绑拍卖算法的改进,为分布式无人艇系统的任务分配提供一种高效且无冲突的分配方案,并且通过异步的改进设计,使得任务分配过程中为同步等待其他无人艇的共识信息所花费的时间大大缩短,即利用重广播策略构建了一个异步通信的分布式任务分配算法,无需同步等待。
[0048]
二、本发明还设计实现了对简单任务和复合任务的分配,严格双艇完成复合任务需要进一步分解为必须由两个类型的无人艇相互合作完成的子任务,继而使得无人艇的任务分配方案能够应对更加复杂的现实作战环境任务要求。
附图说明
[0049]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0050]
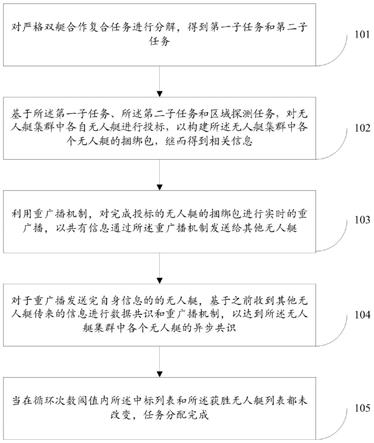
图1为本发明无人艇复合任务分配方法的流程示意图;
[0051]
图2为本发明无人艇任务分配与目标拦截打击示意图;
[0052]
图3为本发明实例中拦截路径结果示意图。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0055]
针对现有多无人艇分布式任务分配技术主要整对简单任务以及艇间通信具有很高的同步性,本发明基于合作受限异构无人艇实现复合任务分配,并且通过重广播机制大大提高了无人艇分布式任务分配的异步性。
[0056]
在一个典型的任务场景下,一队无人艇集群,具备区域探测和目标打击两种类型的异构无人艇,在规定的区域内进行探测任务(两种类型的异构无人艇都能完成),一旦探测到目标入侵艇则需要区域探测艇和目标打击艇配合施行目标拦截打击,本发明具备在局部不稳定的海面场景下仍然保证对目标高效拦截打击能力。
[0057]
本发明提供了一种在合作限制的异构团队下实现的基于异步共识的捆绑拍卖算法的无人艇任务分配方法,任务分配类型为多任务(mt)
‑
多机器人(mr)
‑
时间拓展分配(ta),无人艇任务主要可以描述为:单艇完成简单任务和严格双艇完成复合任务,严格双艇完成复合任务又可以进一步分解为必须由两个类型的无人艇相互合作完成的子任务,异构
无人艇主要包括为区域探测无人艇和对目标拦截打击无人艇类型,主要步骤如下:1)对复合任务进行分解2)根据已知的信息和实时区域探测的实时信息进行各自无人艇的投标,进行捆绑包的构建3)利用重广播机制,对完成投标的无人艇进行实时的重广播,将共有(需要达成共识)信息通过重广播机制发送的通信网上的其他无人艇。4)基于之前收到其他无人艇传来的信息进行数据共识和重广播进而达成异步共识。5)在2)
‑
4)步骤中,如果某个无人艇的情态感知因为海况等原因出现巨大变化,将该无人艇中的捆绑包、位置排序列表、中标列表、获胜无人艇列表全部清空,即实现异步重新计划。6)重复2)
‑
4)步骤,直到在循环次数阈值内中标列表合获胜无人艇列表都未改变,任务分配完成。7)在任务执行的过程中通过区域探测无人艇实时获取的信息更新入侵艇的实时信息,或者我方无人艇被敌方击毁或者长时间失去通信,这些情况下对未完成的任务进行重复步骤1)
‑
4),实现对实时动态环境下异步拦截。与现有的技术相比,本发明充分提高了在不稳定的海面场景(局部船只的情态感知因海浪等原因出现重大变化)下任务分配能力,并且实现了无人艇集群之前的强异步处理,大大缩短了因为同步共识所浪费的时间,同时保持原有基于单艇完成简单任务的任务分配的效率。
[0058]
实施例一
[0059]
本实施例提供的一种基于异步共识捆绑拍卖算法的无人艇复合任务分配方法是一种多任务(一个无人艇需要完成多个任务)
‑
多机器人(一个任务需要多个无人艇完成)
‑
时间扩展分配(无人艇完成任务必须顺序要求的)的分配方法。
[0060]
请参见图1,本实施例提供的一种基于异步共识捆绑拍卖算法的无人艇复合任务分配方法,包括以下步骤:
[0061]
步骤101:对严格双艇合作复合任务进行分解,得到第一子任务和第二子任务;无人艇集群中无人艇包括区域探测无人艇和目标打击无人艇;所述第一子任务由所述区域探测无人艇执行,所述第二子任务由所述目标打击无人艇执行;所述严格双艇合作复合任务为目标拦截打击任务。
[0062]
步骤102:基于所述第一子任务、所述第二子任务和区域探测任务,对无人艇集群中各自无人艇进行投标,以构建所述无人艇集群中各个无人艇的捆绑包,继而得到相关信息;所述区域探测任务由所述区域探测无人艇或者所述目标打击无人艇执行;所述相关信息包括:捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表。
[0063]
步骤103:利用重广播机制,对完成投标的无人艇的捆绑包进行实时的重广播,以共有信息通过所述重广播机制发送给其他无人艇。
[0064]
步骤104:对于重广播发送完自身信息的无人艇,基于之前收到其他无人艇传来的信息进行数据共识和重广播机制,以达到所述无人艇集群中各个无人艇的异步共识。
[0065]
步骤105:重复步骤102至步骤104,当在循环次数阈值内所述中标列表和所述获胜无人艇列表都未改变,任务分配完成。
[0066]
进一步,本实施例提供的方法还包括:
[0067]
在步骤102至步骤104中,如果某个无人艇的情态感知因为不稳定的海面环境出现巨大变化,将该无人艇的保存的捆绑包等信息全部清空,以实现该无人艇任务的重新分配,即实现异步重新计划,即对于出现故障的无人艇进行捆绑包信息处理,以实现异步重新计划目的。
[0068]
进一步,本实施例提供的方法还包括:
[0069]
在任务执行的过程中,通过区域探测无人艇实时获取的信息更新入侵艇实时信息、执行任务无人艇被敌方击毁或者长时间失去通信,这些情况下对未完成的任务进行重复步骤101至步骤104,实现对动态环境下异步拦截。
[0070]
步骤101具体包括以下内容:
[0071]
严格双艇合作复合任务指的是对于一个目标拦截打击任务来说,必须通过一个目标打击无人艇和一个区域探测无人艇合作执行,故对该严格双艇合作复合任务的评分方案score
ikj
进行分解;严格双艇合作复合任务j分解成两个子任务,第一子任务j1和第二子任务j2;其中,第一子任务j1由区域探测无人艇i执行,第二子任务j2由目标打击无人艇k执行,当且仅有两个子任务同时被分配成功时,严格双艇合作复合任务j的评分score
ikj
才不为零,且评分score
ikj
为第一子任务j1和第二子任务j2分配成功的得分之和。
[0072]
对严格双艇合作复合任务的评分方案score
ikj
分解,则有:
[0073]
score
ikj
=∑
j∈rd
∑
i∈i1
∑
k∈i2
(c
ij
x
ij
c
kj
x
kj
)[x
ij
·
x
kj
];
[0074]
其中,rd表示严格双艇合作复合任务,i1表示区域探测无人艇、i2表示目标打击无人艇,c
ij
表示严格双艇合作复合任务j分配给区域探测无人艇i的得分,x
ij
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇i,x
ij
=0表示表示严格双艇合作复合任务j未成功分配给区域探测无人艇i,c
kj
表示严格双艇合作复合任务j分配给区域探测无人艇k的得分,x
kj
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇k,x
kj
=0表示表示任务j未成功分配给区域探测无人艇k,score
ikj
表示严格双艇合作复合任务j被区域探测无人艇i和目标打击无人艇k共同执行的分数。
[0075]
由于上述分解其实是将严格双艇合作复合任务j分为第一子任务j1和第二子任务j2,并分别进行拍卖,因此最后可能会出现只分配出去一个子任务,而另一个子任务未分配成功,显然这种分配是无效分配,即无效分配任务表示严格双艇合作复合任务j未成功分配给区域探测无人艇i或者严格双艇合作复合任务j未成功分配给区域探测无人艇k。针对该无效分配任务,提出时间间隔δt检测方法,即循环对严格双艇合作复合任务的有效性进行检测,对无效分配任务来说去除其原有记录并重新分配。
[0076]
步骤102具体包括以下步骤:
[0077]
21)根据当前需要进行区域探索的海域任务和已经探测到的需要拦截打击的目标艇任务进行投标评分,由于该场景是针对多任务
‑
多智能体
‑
时间扩展的任务分配,故计算得分需要考虑其任务的执行顺序,无人艇i在已有捆绑包bi(分配给无人艇i的任务集合)和位置排序列表pi(捆绑包bi中任务的执行顺序),对于任务j投标的得分为将任务j插入到位置排序列表pi中的每一个位置,选择分数增加最大的评分为无人艇i对该任务的评分。
[0078]
22)选择评分maxscore
ij
的任务j作为无人艇i的中标任务。
[0079]
23)每个无人艇选择得分最高的任务j添加至自身的捆绑包b
i
中,并且不断投标直到达到无人艇最大执行任务数量,最终得出每一个无人艇的捆绑包列表b
i
、位置排序列表p
i
,和共有(需要达成共识)的中标列表y
i
、获胜无人艇列表z
i
。
[0080]
步骤103具体包括以下步骤:
[0081]
31)根据通信连通矩阵g(t)判断在t时刻无人艇i和无人艇k之间是否能够相互通信,对已经完成捆绑包构建的无人艇进行中标列表y
i
、获胜无人艇列表z
i
信息的重广播发送
给其他通信连通的g
ik
(t)=1的其他无人艇。
[0082]
步骤104具体包括以下步骤:
[0083]
41)对在共识阶段之前接收到其他无人艇的信息与自身信息进行对比进而采用更新并重播、重置并重播、撇弃并重播、撇弃并不重播、更新时间并重播,五种可能的动作。对于重广播发送完自身信息的无人艇,在共识阶段之前接收到其他无人艇的信息与自身信息进行对比,并根据不同的对比结果采用不同的动作以达到所述无人艇集群中各个无人艇的异步共识。
[0084]
所述动作包括:更新并重播、重置并重播、撇弃并重播、撇弃并不重播、更新时间并重播。
[0085]
42)进而达成公共信息(中标列表y
i
、获胜无人艇列表z
i
)的一致性。
[0086]
步骤105具体包括以下步骤:
[0087]
51)在步骤102
‑
步骤104中,异步捆绑包的构建和共识两个阶段在不断的迭代,直至生成稳定的分配方案。
[0088]
52)如果迭代的过程中某个无人艇自身的情景感知出现巨大变化则将该无人艇中的各类数据全部置零,重新进行拍卖和共识,即异步重计划,进一步加强异步性。
[0089]
与现有技术相比,本发明具有以下优点:
[0090]
一、本发明通过对捆绑拍卖算法的改进,为分布式无人艇系统的任务分配提供一种高效且无冲突的分配方案,并且通过异步的改进设计,使得任务分配过程中为同步等待其他无人艇的共识信息所花费的时间大大缩短,即利用重广播策略构建了一个异步通信的分布式任务分配算法,无需同步等待。
[0091]
二、本发明还设计实现了对简单任务和复合任务的分配,严格双艇完成复合任务需要进一步分解为必须由两个类型的无人艇相互合作完成的子任务,继而使得无人艇的任务分配方案能够应对更加复杂的现实作战环境任务要求。
[0092]
三、本发明实现了动态实时的任务分配,无论是由于分配过程中单个无人艇情态感知出现巨大变化还是动态任务发生改变(目标艇的发现、己方艇的长时间失联或损毁)都能够进行异步重计划和动态重新分配,极大增强了算法对不稳定海面环境的鲁棒性。
[0093]
实施例二
[0094]
本实施例提供一种基于异步共识捆绑拍卖算法的无人艇复合任务分配方法,包括以下步骤:
[0095]
(1)对复合任务(双艇任务)的评分方案进行分解:
[0096]
score
ikj
=∑
j∈rd
∑
i∈i1
∑
k∈i2
(c
ij
x
ij
c
kj
x
kj
)[x
ij
·
x
kj
]
[0097]
其中,rd表示双艇合作复合任务,i1表示区域探测无人艇、i2表示目标打击无人艇,c
ij
表示任务j分配给无人艇i的得分,x
ij
=1表示任务j成功分配给无人艇i,x
ij
=0表示未分配,score
ikj
表示双艇复合任务j被区域探测无人艇i和目标打击无人艇k共同执行的分数。[x
ij
·
x
kj
]表示也只有双艇复合任务j的两个子任务都成功分配后,该复合任务才算分配成功,其评分才大于零。
[0098]
由于上述分解其实是将双艇合作复合任务j分为两个子任务j1和j2,并分别进行拍卖,因此最后会出现只分配出去一个子任务,而另一个子任务未分配成功,显然这种分配是无效分配,根据无人艇集群之间达成共识的中标列表y
i
,即可检测出对应的子任务是否
都分配成功,即y
ij1
≠0,y
ij2
≠0。
[0099]
只要不满足上式的即为无效任务分配,对于无效分配的任务去除其该任务原有记录并重新分配,即使得y
ij1
=0,y
ij2
=0。
[0100]
在任务分配的过程中,每间隔时间δt就对其是否有无效分配进行检查,对该时刻检测出来的无效任务进行释放,重新分配(这样避免了在任务分配完成后再对其检测,进而造成整个算法重新运行所浪费的时间。
[0101]
其中,间隔时间δt的阈值设置为了3
‑
5倍的捆绑包构建所花费时间。
[0102]
(2)根据已知的信息和实时区域探测的实时信息(入侵艇的位置和航况信息)进行各自无人艇的投标,进行捆绑包的构建,继而获得最初的私有的捆绑包列表b
i
、位置排序列表p
i
,和共有(需要达成共识)的中标列表y
i
、获胜无人艇列表z
i
。
[0103]
计算任务初期的投标方案的得分:
[0104]
其中,b
i
为无人艇i的捆绑包,存放无人艇i分配到的任务集。p
i
为无人艇i的路径列表,存放无人艇i分配到的任务集,但是它按照无人艇i将要执行的任务的顺序进行排序。p
i
n
{j}表示在无人艇i的路径列表中第n个位置插入任务j。表示无人艇i按顺序执行路径列表p
i
中所有任务获得的分数。上述式子只有在任务j不属于捆绑包b
i
时才成立,否则为零。
[0105]
对已经确定任务顺序的每个任务的得分score
ij
为:
[0106]
其中,γ为任务j的折扣系数,t
ij
(p
i
)为无人艇i在路径列表p
i
下,执行任务j所花费的时间,c
j
则为任务j的静态得分。
[0107]
每个无人艇选择满足得分c
ij
[b
i
]大于中标列表y
ij
中最高的任务后,构建自身最初的投标方案,并将任务j添加至自身的捆绑包b
i
中,并且不断投标直到达到无人艇最大执行任务数量。最终得出每一个无人艇的b
i
、p
i
、中标列表y
i
、获胜无人艇列表z
i
,在后期与共识阶段之间迭代。具体的伪代码流程:
[0108]
1:选择无人艇i,在第t次迭代;
[0109]
2:y
i
(t)=y
i
(t
‑
1);
[0110]
3:z
i
(t)=z
i
(t
‑
1);
[0111]
4:b
i
(t)=b
i
(t
‑
1);
[0112]
5:p
i
(t)=p
i
(t
‑
1);
[0113]
6:while|b
i
|<l
i
(无人艇i最大执行任务数量);
[0114]
7:
[0115]
8:h
ij
=ⅱ(c
ij
>y
ij
);
[0116]
9:j
max_i
=max(c
ij
·
h
ij
);
[0117]
10:
[0118]
11:b
i
=b
i
{j
max_i
};
[0119]
12:p
i
=p
i
n
{j
max_i
};
[0120]
13:
[0121]
14:
[0122]
15:结束while循环;
[0123]
16:结束本次迭代。
[0124]
(3)利用重广播机制,对完成投标的无人艇进行实时的重广播,将共有(需要达成共识)信息通过重广播机制发送的通信网上的其他无人艇,即对于无人艇i,当其完成了上一阶段对捆绑包的构建时,即刻(t时刻)使用重广播机制,将无人艇i上存储的中标列表y
i
、获胜无人艇列表z
i
发送给t时刻g
ik
(t)=1的无人艇k。
[0125]
具体包括以下步骤:
[0126]
31)根据通信连通矩阵g(t)判断在t时刻无人艇i和无人艇j之间是否能够相互通信,g
ik
(t)=1表示在t时刻,无人艇i,j之间能正常通信,反之g
ik
(t)=0则不能。
[0127]
对于当前时刻t,g
ik
(t)=1时,将无人艇i的捆绑包构建阶段的数据重广播给无人艇k,即根据实时的动态通信网络进行数据的重广播。
[0128]
32)对已经完成捆绑包构建的无人艇进行中标列表y
i
、获胜无人艇列表z
i
信息的重广播发送给其他通信连通的g
ik
=1的其他无人艇。
[0129]
(4)对于重广播发送完自身信息的无人艇i,对之前接收到的基于之前收到其他无人艇传来的信息达成异步共识,对收到的信息进行比较处理,对不同的情况分别作出如下5种可能的动作:
[0130]
1:更新并重播:接收方i接收到发送方k的y
kj
>y
ij
,更新中标列表y
i
、获胜无人艇列表z
i
和中标时间t
ij
,并且重播发送方k的信息给其他无人艇。
[0131]
2:重置并重播:接收方i接收到发送方k的消息,并更改其中某个y
i
数据,该数据后面的所中标出价都失去意义(后面数据的生成时基于前面的路径的),故将其后的数据全部置零即并且重播发送者消息给其他无人艇
[0132]
3:撇弃并重播,接收方i接收到发送方k的y
kj
<y
ij
,不改变自身数据,将接收到的数据撇弃,并且重播接收方的数据给其他无人艇。
[0133]
4:撇弃并不重播:接收方i接收到发送方k的y
kj
<y
ij
,不改变自身数据,将接收到的数据撇弃,并且在比较时间戳|t
ij
‑
t
kj
|<τt发现数据不是新数据,已经传播过了,则选择不重播。
[0134]
5:更新时间并重播:y
kj
<y
ij
&&z
ij
=i&&z
kj
≠i,即表示任务的获胜者接收到一条评分不如自己的消息时,更新时间进而反映当前接收方i的出价在当前时间仍然时活跃的,并且将接收方数据进行重播。
[0135]
通过以上步骤的反复重播处理进而达成公共信息(中标列表y
i
、获胜无人艇列表z
i
)的一致性。
[0136]
(5)在步骤(2)
‑
(4)中,如果某个无人艇i的情态感知因为海况出现巨大变化,将该无人艇中的捆绑包、位置排序列表、中标列表、获胜无人艇列表、时间戳列表全部清空,该无人艇重新进行投标共识,即实现异步重新计划:
[0137]
1.y
i
=0;
[0138]
2.
[0139]
3.
[0140]
4.
[0141]
5.t
i
=0;
[0142]
(6)重复步骤(2)
‑
(4),直到在循环次数阈值内中标列表合获胜无人艇列表都未改变,任务分配完成。
[0143]
(7)在任务执行的过程中通过区域探测无人艇实时获取的信息更新入侵艇的实时信息,或者我方无人艇被敌方击毁或者长时间失去通信,这些情况下对未完成的任务进行重复步骤(1)
‑
(4),实现对动态环境下异步拦截。
[0144]
如图2所示,以2艘目标打击无人艇、3艘区域探测无人艇、两艘目标入侵艇为例,任务主要有6处区域探测任务,2处目标拦截打击任务。对于区域探测任务,目标打击无人艇和区域探测无人艇都可以执行,对于目标拦截打击任务,必须由一艘区域探测无人艇和一艘区域打击无人艇合作完成。
[0145]
本实施例由基于异步共识捆绑拍卖算法的无人艇复合任务分配方法得出的最终解,如图3所示,z轴(time)表示任务执行时间,xy轴表示地理位置,圆圈表示无人艇,三角形表示区域探测任务,长方形表示目标拦截打击任务,两个垂直连着的三角形(或长方形)表示任务执行的时长。
[0146]
实施例三
[0147]
本实施例提供了一种无人艇复合任务分配系统,包括:
[0148]
分解模块,用于对严格双艇合作复合任务进行分解,得到第一子任务和第二子任务;无人艇集群中无人艇包括区域探测无人艇和目标打击无人艇;所述第一子任务由所述区域探测无人艇执行,所述第二子任务由所述目标打击无人艇执行;所述严格双艇合作复合任务为目标拦截打击任务。
[0149]
构建模块,用于基于所述第一子任务、所述第二子任务和区域探测任务,对无人艇集群中各自无人艇进行投标,以构建所述无人艇集群中各个无人艇的捆绑包,继而得到相关信息;所述区域探测任务由所述区域探测无人艇或者所述目标打击无人艇执行;所述相关信息包括:捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表。
[0150]
广播模块,用于利用重广播机制,对完成投标的无人艇的捆绑包进行实时的重广播,以共有信息通过所述重广播机制发送给其他无人艇。
[0151]
异步共识模块,用于对于重广播发送完自身信息的无人艇,基于之前收到其他无人艇传来的信息进行数据共识和重广播机制,以达到所述无人艇集群中各个无人艇的异步共识。
[0152]
任务分配结束模块,用于当在循环次数阈值内所述中标列表和所述获胜无人艇列表都未改变,任务分配完成。
[0153]
所述分解模块,具体包括:
[0154]
分解单元,用于对严格双艇合作复合任务的评分方案score
ikj
进行分解;
[0155]
其中,score
ikj
=∑
j∈rd
∑
i∈i1
∑
k∈i2
(c
ij
x
ij
c
kj
x
kj
)[x
oj
·
x
kj
];
[0156]
rd表示严格双艇合作复合任务,i1表示区域探测无人艇、i2表示目标打击无人艇,c
ij
表示严格双艇合作复合任务j分配给区域探测无人艇i的得分,x
ij
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇i,x
ij
=0表示表示严格双艇合作复合任务j未成功分配给区域探测无人艇i,c
kj
表示严格双艇合作复合任务j分配给区域探测无人艇k的得分,
x
kj
=1表示严格双艇合作复合任务j成功分配给区域探测无人艇k,x
kj
=0表示严格双艇合作复合任务j未成功分配给区域探测无人艇k,score
ikj
表示严格双艇合作复合任务j被区域探测无人艇i和目标打击无人艇k共同执行的分数;
[0157]
重新分配单元,用于对于无效分配任务,去除原有分配记录并进行重新分配,即得到第一子任务和第二子任务;所述无效分配任务表示严格双艇合作复合任务j未成功分配给区域探测无人艇i或者严格双艇合作复合任务j未成功分配给区域探测无人艇k。
[0158]
所述构建模块,具体包括:
[0159]
得分计算单元,用于基于所述第一子任务、所述第二子任务和区域探测任务,计算每个无人艇的任务初期投标方案得分;
[0160]
中标任务确定单元,用于将任务初期投标方案得分最高的任务作为对应的无人艇的中标任务;
[0161]
构建单元,用于循环得分计算单元和中标任务确定单元,直到达到无人艇最大执行任务数量,得到每个无人艇的捆绑包列表、位置排序列表、共有中标列表和获胜无人艇列表。
[0162]
所述异步共识模块,具体包括:
[0163]
异步共识单元,用于对于重广播发送完自身信息的无人艇,在共识阶段之前接收到其他无人艇的信息与自身信息进行对比,并根据不同的对比结果采用不同的动作以达到所述无人艇集群中各个无人艇的异步共识;
[0164]
所述动作包括:更新并重播、重置并重播、撇弃并重播、撇弃并不重播、更新时间并重播。
[0165]
本发明通过基于共识的捆绑算法进行设计改进,使得算法能够从面向单艇完成任务拓展到双艇合作完成任务 单艇完成任务组合的复合任务环境,并且通过引入重广播和异步重计划等策略使得原本共识阶段紧密同步的捆绑算法异步化,更深一步的适应不稳定海面环境,还进一步的使得该算法动态化,可以应对实时任务的增加或者无人艇的损坏,最终在完成这些扩展后仍然保持了其原有的解的高效。
[0166]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0167]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。