1.本发明涉及机械工件/工作装置提升和搬运领域,尤其涉及一种内置支架式提升器。
背景技术:
2.机器人在制造生产中常用来代替人类做枯燥、单调、劳动强度大的重复性工作或恶劣、极端工况下的危险性工作。机器人自动化生产线成套设备的使用,保证了产品生产质量,提高了产品生产效率,降低了产品生产成本,避免了工伤事故的发生,是企业自动化生产装备的发展主流及投资重点对象。工业生产中大尺寸内径工件在结构件中的应用非常广泛,对其进行提升和搬运是最常见的工序流程。机器人末端常见的抓取装置为爪型机械手,夹持小型工件可顺利完成,但夹持较大或大尺寸内径工件或工作装置,因夹头体积小,夹持时不能顺利完成任务。
3.针对机器人采用两爪内撑式钳爪夹持部件不稳定,改用三爪内撑式钳爪夹持工件长时间工作后仍出现夹持不稳定的现状,申请号为201610737426.4的发明专利公开了一种内撑钳爪式机器人,该技术方案包括机器人本体和设置于其上的内撑式钳爪,内撑式钳爪由手指驱动电磁铁、连接板、钳爪安装座、钳爪、中心轴、支撑部件和滑觉传感器组成。机器人通过多个钳爪将工件从内径处夹持,电磁铁产生的电磁力驱动设置于连接板的中心轴向下移动,使位于其上的支撑部件撑开多个钳爪,撑紧工件。钳爪和工件之间的滑动通过位于钳爪末端的滑觉传感器进行检测,然后将检测结果反馈给机器人控制系统进而控制电磁铁产生的电磁力与钳爪和支撑部件两者之间产生的摩檫力相平衡,达到工件牢固夹持的效果。
4.上述技术方案在夹持内径工件时依靠固定于中心轴上的倒圆锥体或倒圆台形结构的支撑部件撑开钳爪实现夹持动作。夹持重型工件时,支撑部件侧面和钳爪侧面挤压力较大,需要电磁铁提供较大的电磁力来克服钳爪与支撑部件间相对运动产生的摩檫力,实现钳爪对工件的牢固夹持。为此需要电磁铁体积较大,致使整体结构重力较大,在机器人提升重量一定的情况下,降低了机器人夹持工件的重量,所以不适用于具有内径重型工件的夹持。该装置含有电磁铁,工作时产生磁场,在抗磁干扰能力弱的工作环境中不能使用,使用场合具有局限性。虽然支撑部件外周设置橡胶层,但是屡次夹取工件支撑部件和钳爪之间摩擦力大且摩擦频繁,导致橡胶层寿命较低,维护不方便,可推广性较低。该技术方案结构固定,钳爪支撑范围变化小,夹持不同内径工件时的通用性较低。
技术实现要素:
5.发明目的:本发明旨在提供一种应用范围广、通用性强、高效快捷的内置支架式提升器。
6.技术方案:本发明的内置支架式提升器,包括夹取机构、与夹取机构连接的吊钩、与夹取机构连接的链索机构、与链索机构连接的提升机构;所述吊钩与提升机构活动连接;
所述提升机构包括连杆组件和撑板组件,所述连杆组件包括一对上连杆和一对下连杆,所述上连杆和下连杆通过第二销轴连接;所述撑板组件铰接在一对下连杆中间;所述链索机构、连杆组件和撑板组件组成的提升系统绕提升器中心轴线均布设置。
7.进一步地,所述夹取机构包括夹取座、夹取台座下底面设有的提升耳板、挂接销轴和夹取座侧面固定的链索铰接耳板,所述链索铰接耳板与链索机构铰接;所述挂接销轴用于固定挂接吊钩。
8.更进一步地,所述夹取座为正六棱柱且顶部设有圆柱体,所述圆柱体为搬运机器人的机械手抓取手柄。
9.更进一步地,所述吊钩上端开设有用于挂接销轴活动的孔,所述孔为非对称元宝形。
10.进一步地,所述链索机构包括链索和第一销轴;其中的链索为串接在一起的椭圆形链环结构,上端通过自身机构中的第一销轴铰接在夹取座侧面耳板上,下端通过卸扣固联在铰接于提升机构中的撑板组件上。
11.进一步地,所述提升机构包括底座组件,底座组件包括上底座和下底座,上底座与上连杆连接,下底座与下连杆连接。
12.更进一步地,所述上底座顶面中心设有一个梯形块,梯形块两侧各设有一提升耳板,两个提升耳板中间设有固定提升销轴,所述固定提升销轴与吊钩挂接;所述梯形块起防止吊钩的钩端的水平滑动,利于钩端绕垂直销轴轴线平面内的转动;所述吊钩在自身偏心重力、与其挂接夹取机构重力及与钩端接触的下方提升机构设置的梯形屋脊结构的共同作用下可实现自动挂钩和脱钩。
13.更进一步地,所述上底座为具有凹槽的正六棱柱结构,所述凹槽用于减小与链索的运动干涉;上底座的侧面设有的连杆铰接耳板,所述连杆铰接耳板用于与上连杆连接;上底座的台座下底面中心设有圆柱筒,所述圆柱筒的底部设有倒角利于与下底座装配。
14.更进一步地,所述下底座为具有凹槽的六棱台结构,且通过侧面设有的连杆铰接耳板与下连杆连接;优选的,所述下底座为“士”字形结构,包括第一台座和第二台座,第一台座为正六棱柱结构,且具有凹槽,所述凹槽便于撑板收拢;所述第一台座的侧面设有连杆铰接耳板,所述连杆铰接耳板与下连杆连接;第一台座的台座中心上设一实心圆柱体,所述圆柱体与上底座装配;第二台座的台座中心上设一圆柱体,所述圆柱体用于支撑提升机构并降低撑板撑开和收拢时的运动阻力。
15.进一步地,上底座和下底座通过定位销轴连接。拆卸上、下底座的定位销轴可调整台座的间距,改变各组连杆组件间的夹角,使铰接于下连杆的各组撑板旋转中心所在直径的大小发生变化,驱使各撑板下方的撑脚撑开的空间范围增大,实现不同的大尺寸内径工件的提升和搬运。
16.有益效果:与现有技术相比,本发明具有如下显著优点:(1)抓取便捷,工作可靠;为便于机器人末端机械手从工具台架快捷抓取工具,根据机械手抓取特点,本内置支架式提升器夹取机构上部设置有柱体抓取手柄,其圆柱面上沿轴向加工均布平面,增加机器手手指与抓取手柄之间的接触面积,手柄顶部设置有凸台,避免机器手抓取内置支架式提升器提升工件时提升器滑脱引起的安全隐患,提高工作可靠性;
17.(2)自动挂脱,无需干预;本内置支架式提升器吊钩设置为近似正三棱柱结构,侧
板上部设置有非对称元宝形孔,与钩端接触的底面设置有梯形屋脊结构,钩端与接触面接触后会形成瞬时旋转轴,在吊钩偏心重力和与之挂接的夹取机构重力产生的合力作用下,驱动吊钩逆时针或顺时针转动,实现自动挂钩和脱钩,无需人为干预,方便快捷,工作效率高;
18.(3)应用范围广、通用性强;本内置支架式提升器底座组件为近似倒六棱台结构,便于内置提升时的导向,上、下底座的台座间距可变,带动与之铰接的各组连杆组件中上下连杆之间夹角改变,引起与连杆组件铰接的各撑板旋转中心所在直径的大小发生变化,驱使撑板下方的撑脚撑开的空间范围增大,可提升和搬运不同的内径孔型和尺寸的批量工件,应用场合广,通用性强。
附图说明
19.图1为本发明的主视图,(a)为非工作状态,(b)为工作状态;
20.图2为本发明的俯视图和仰视图,(a)为非工作状态俯视图,(b)为工作状态俯视图,(c)为非工作状态仰视图,(d)为工作状态仰视图;
21.图3为本发明的夹取机构的结构示意图;
22.图4为本发明的吊钩结构示意图;
23.图5为本发明的链索机构在内置支架式提升器中的位置示意图;
24.图6为本发明的链索结构示意图;
25.图7为本发明的提升机构结构示意图;
26.图8为本发明的底座组件结构示意图;
27.图9为本发明的上底座结构示意图;
28.图10为本发明的下底座结构示意图;
29.图11为本发明的上连杆结构示意图;
30.图12为本发明的下连杆结构示意图;
31.图13为本发明的撑板结构示意图;
32.图14为本发明的吊钩自动脱钩过程示意图,(a)挂接销轴在吊钩左上位i脱离,(b)挂接销轴在吊钩左下位ii施力,(c)挂接销轴滑过吊钩轮廓凸点右侧位iii,(d)挂接销轴进入吊钩右上位iv;
33.图15为本发明的吊钩自动挂钩过程示意图,(a)挂接销轴在吊钩右上位iv脱离,(b)挂接销轴在吊钩右下位v施力,(c)挂接销轴滑过吊钩轮廓凸点左侧位vi,(d)挂接销轴进入吊钩左上位i。
具体实施方式
34.下面结合附图对本发明的技术方案作进一步说明。
35.图中,1、夹取机构;11、夹取座;12、挂接销轴;2、吊钩;3、链索机构;31、链索;32、第一销轴;4、提升机构;41、底座组件;411、上底座;412、下底座;413、定位销轴;414、提升销轴;42、连杆组件;421、上连杆;422、下连杆;423、第二销轴;424、开口销;43、撑板组件;431、撑板;432、第三销轴。
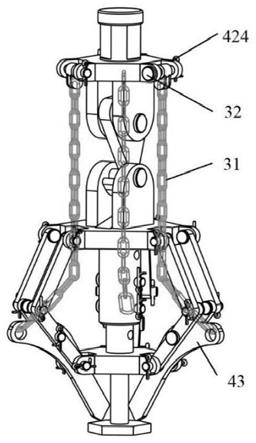
36.如图1
‑
2所示,本发明的内置支架式提升器包括夹取机构1、吊钩2、链索机构3和提
升机构4四个部分。夹取机构1设置在内置支架式提升器的顶部,提升机构4通过吊钩2或链索机构3与夹取机构1联为一体,挂接在机器人末端机械手上自动完成大尺寸内径工件的提升和搬运。
37.如图3所示,夹取机构1包括夹取座11和挂接销轴12两部分,夹取座11上部圆柱体为机械手抓取手柄,圆柱面上绕轴向加工三个均布平面,增加机械手手指与抓取手柄间的接触面积,抓取手柄顶部设有凸台,避免机器手抓取内置支架式提升器提升工件时提升器滑脱引起的安全隐患,夹取座11台座设置正六棱柱结构,侧面设置三对链索铰接的耳板,台座下底面设有提升耳板,下方固定挂接销轴12,用于挂接吊钩2实现工件的提升和搬运动作。
38.如图4所示,吊钩2设置为近似正三棱柱结构,侧板上部设置非对称元宝形通孔结构,贯串在通孔内的挂接销轴12可自由移动,实现吊钩2与提升机构4之间的挂钩或脱钩。
39.如图5
‑
6所示,链索机构3中的链索31上端通过自身机构中的第一销轴32铰接在夹取机构1上,链索下端通过卸扣固联在提升机构4的撑板组件43上,用于控制提升机构4中撑板组件43的撑开,实现大尺寸内径工件的提升。
40.在一实施例中,链索31可替换为钢丝绳或其他柔性体。
41.如图7所示提升机构4具有近似倒六棱台结构,便于内置支架式提升器放入大尺寸内径工件后有良好的导向作用。该机构由底座组件41、连杆组件42、撑板组件43组成;底座组件41由上底座411和下底座412组成。上底座411上底面设置提升耳板,两耳板的上方固定提升销轴414,与吊钩2配合,实现提升机构中撑板组件43在自身偏心重力作用下的收拢;两耳板下方的台座上底面设置梯形屋脊结构,便于吊钩2与提升机构4的吊起与脱开,台座为具有凹槽的正六棱柱结构,减小与链索31的运动干涉;台座下底面中心设置有圆柱筒,该筒下端面内孔倒角与下底座412配合时起导向作用;下底座412设置为“士”字形结构。上方台座底面中心分别焊接不同直径圆柱体,上方圆柱体沿轴向垂直加工与上底座圆柱筒配作的均匀分布的销轴孔,通过定位销轴413定位,该结构可根据提升工件内径大小调节上底座411、下底座412台座的间距,改变各组连杆组件42中上连杆421和下连杆422的夹角,使铰接在下连杆422上的各撑板431旋转中心所在直径的大小发生变化,致使各撑板431下方的撑脚撑开的空间范围增大,可实现不同的大尺寸内径工件的提升和搬运;下方圆柱体用来支撑提升机构4并降低撑板431撑开和收拢时的运动阻力。上、下方台座具有正六棱柱结构,上方台座还设置有凹槽结构,利于撑板431的收拢,设置的下方台座增加了提升机构4工作时的稳定性。
42.如图8
‑
13所示,所述连杆组件42由上连杆421和下连杆422组成。上连杆421、下连杆422具有a型导向平键形结构,除两端分别设置销轴孔外,下连杆422中部还设有与撑板组件43铰接的销轴孔;上连杆421、下连杆422之间及连杆另一端通过第二销轴423分别相互铰接和分别铰接在上底座411、下底座412侧面的耳板上,连杆组件42用于支撑铰接在下连杆422上的撑板组件43。撑板组件43由撑板431和撑板第三销轴432组成,撑板431与下连杆422通过第三销轴432铰接,撑板431为重心偏向圆柱孔的近似对勾形结构,撑板431非工作时处于收拢状态。内置支架式提升器安装完成后,所有销轴均用开口销424完成轴向固定,链索机构3、连杆组件42和撑板组件43组成的提升系统绕提升器中心轴线两两互成120
°
均布设置。
43.内置支架式提升器工作原理如下:
44.如图14所示,内置支架式提升器非工作状态下,挂接在夹取机构1上的吊钩2钩住提升机构4上部的提升销轴414,链索31处于松弛状态,提升机构4中的各组撑板431在自身偏心重力作用下向提升器中心轴收拢。机器人末端机械手抓取内置支架式提升器中的抓取手柄后,将提升机构4放入所需提升和搬运大尺寸内径工件的内部,下底座的下方台座触底后,若机械手继续下放,吊钩2将脱开提升机构4上部的提升销轴414,底部触到位于提升机构4中上底座411两提升耳板间的梯形屋脊结构后,夹取机构1中的挂接销轴12脱离吊钩2的左上位i,吊钩2在重力作用下钩端滑向梯形屋脊底部,钩端与接触面形成瞬时旋转轴,因吊钩2侧板上部设置有非对称元宝形孔结构,挂接销轴12移至吊钩2左下位ii时,因自身偏心重力和上部挂接的夹取机构1重力产生的合力作用,吊钩2逆时针转动,然后上提夹取机构1,挂接于其上的挂接销轴12上升,此时挂接销轴12滑过元宝形孔上部轮廓凸点的右侧位iii,进入元宝形孔的右上位iv,继续上提,吊钩2在偏心重力矩的驱动下再次逆时针转动,脱离提升销轴414在竖直方向移动的干涉,完成自动脱钩过程。夹取机构1再继续上升,链索31逐渐被拉直,将拉动提升机构4中铰接于连杆组件42上的撑板431绕着第三销轴432逆时针转动,各组撑板431被撑开,卡住需要提升和搬运的工件内壁,此时工件将完成提升动作。
45.如图15所示,搬运工件到指定位置后,夹取机构1继续下放,与夹取机构1铰接的链索31松弛,提升机构4中铰接在连杆组件42上的撑板431在偏心重力的作用下绕着第三销轴432顺时针转动,各撑脚脱离工件内壁恢复收拢状态,吊钩2向提升机构4靠近,待吊钩2触及提升机构4中上底座411两提升耳板间下方的梯形屋脊结构后,钩端与接触面形成瞬时旋转轴,夹取机构1中的挂接销轴12脱离吊钩2的右上位iv,此时吊钩2虽然在偏心重力作用下有偏向固联在提升机构4中上底座411两提升耳板上方提升销轴414的趋势,但是挂接销轴12脱离吊钩2时间较短,待挂接销轴12下移至吊钩2右下位v时,吊钩2在上部挂接的夹取机构1的重力和自身偏心重力产生的合力作用下偏向提升机构4中提升销轴414的反方向,然后上提夹取机构1,挂接于其上的挂接销轴12上升滑过吊钩2元宝形孔上部轮廓凸点的左侧位vi,进入元宝形孔左上位i,继续上提,吊钩2在自身偏心重力矩驱动下顺时针转动,钩住提升机构4中的提升销轴414,完成自动挂钩过程。夹取机构1继续上升,吊钩2通过钩住的提升销轴414带动提升机构4上升,内置支架式提升器脱离搬运工件内部,完成一次搬运过程,提升器移动到下一个工件,重复以上工作过程,完成所有工件的提升和搬运。
46.本发明通过改进抓取机构的结构和改变链索机构、连杆组件及撑板组件组成的提升系统绕提升器中心轴线分布方式还可应用于移动的或固定的工程吊装机械等吊运大尺寸内径回转曲面工件或装配成的工作装置中。
47.对本发明所属技术领域的科技人员来说,在不脱离本发明理念的前提下,还可做出多种改进方式:如夹取机构上部抓取手柄改为吊环与其他工作装置挂接,夹取机构和提升机构中的台座改为回转体或非正六棱柱结构,铰接耳板与台座改为吊挂式结构,与提升机构铰接的链索改为钢丝绳或其他柔性体,吊钩改为半自动挂脱钩方式,底座组件改为倒圆台、倒圆锥或倒棱柱结构,连杆组件改为间隙配合的榫卯结构,撑板改为其他型式的整体或拼装焊接成的非对称弯曲结构,铰接销轴改为螺栓连接,梯形屋脊改为三角形屋脊,链索机构、连杆组件和撑板组件组成的提升系统绕提升器中心轴线改为其他分布方式等,实现大尺寸内径工件或装配成的工作装置的提升和搬运;以上改进方式均应涵盖在本发明请求
保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。