1.本实用新型涉及机器人技术领域,尤其涉及一种智能机器人全场景模拟测试平台。
背景技术:
2.随着机器人技术的迅速发展,机器人应用越来越广泛,例如,迎宾机器人、送餐机器人以及教育机器人、仿生机器人等等。机器人是自动执行工作的机器装置,它可以接受人类指挥,也可以运行预先编排的程序,还可以依据人工智能技术制定的原则行动。随着国家宏观战略的重视,我国移动机器人的研究已经进入空前热门的时期。各种各样的移动机器人底盘逐渐地映入人们视线,在现有技术中,具有悬架的移动机器人底盘多种多样,已基本满足功能,但仍存在一些不足。
3.目前,大多数机器人厂家都没有集成型测试场地,对机器人的测试采用在单个测试参数单独搭建工装的测试方法,效率低,并且各个参数的测试较为分散,收集整理工作较为繁琐,其中的各种测试场景并不全面,无法(如在出厂时)较为全面地发现机器人在运行时所潜在的隐患问题。
4.因此,亟需一种智能机器人全场景模拟测试平台,以填补现有技术的空白。
技术实现要素:
5.本实用新型的目的在于提出一种智能机器人全场景模拟测试平台,以较为全面地及时发现机器人在(特别是刚出厂时)运行时所潜在的隐患或问题。
6.为达此目的,本实用新型采用以下技术方案:
7.提供一种智能机器人全场景模拟测试平台,包括测试通道,所述测试通道上间隔设有不同的单项测试单元,相邻两个的所述单项测试单元之间的间隔段用于增加机器人的测试行程。
8.作为上述的一种优选技术方案,该单项测试单元包括顺序排布或混合排布的弯道类单元、障碍类单元、坡道类单元以及砍道类单元的任一项或任意组合。
9.作为上述的一种优选技术方案,所述弯道类单元包括s型弯道、直角弯道、u型弯道、w型弯道以及z型弯道的任一或任意组合。
10.作为上述的一种优选技术方案,单个所述弯道类单元包括设于所述测试通道上的两侧隔挡,通过所述两侧隔挡形成可拆的弯道通道,所述两侧隔挡的相对内壁一侧设有防撞缓冲带,所述弯道通道的宽度大于所述机器人的最大外形宽度,所述两侧隔挡与所述机器人的最大外形宽度之间的间距不超过0.1m。
11.作为上述的一种优选技术方案,所述障碍类单元包括特殊障碍单元、立柱式障碍单元以及悬空障碍单元的任一项或任意组合。
12.作为上述的一种优选技术方案,所述特殊障碍单元包括黑色吸光材质障碍物、镜面材质障碍物以及玻璃材质障碍物的任一个或任意组合。
13.作为上述的一种优选技术方案,所述立柱式障碍单元包括错开排布的多个立柱体。
14.作为上述的一种优选技术方案,所述悬空障碍单元包括相对于所述测试通道位于不同高度的悬空体或悬空面或悬空点以供测试机器人的高度方向上是否会碰撞所述悬空体或所述悬空面或所述悬空点。
15.作为上述的一种优选技术方案,所述坡道类单元包括上下坡道,所述上下坡道包括上坡段、平直段以及下坡段,所述上下坡道上铺设有不同的地毯,所述平直段上设有过电梯砍道。
16.作为上述的一种优选技术方案,所述砍道类单元包括多道间隔的连续砍道。
17.本实用新型有益效果:
18.本实用新型通过模拟机器人在各种应用环境(特别是酒店环境),包含硬地面,地毯地面,上下坡,过连续坎,直角弯道,s型弯道,连续过障,悬空避障,特殊材质障碍等测试,可以进行全面综合性测试,进而及时发现机器人(特别是刚出厂时)在上述环境的实际运行情况。
附图说明
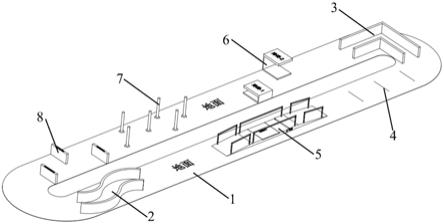
19.图1为本实用新型智能机器人全场景模拟测试平台的整体结构示意图;
20.图2为对应图1中第一类弯道的结构示意图;
21.图3为对应图1中第二类弯道的结构示意图;
22.图4为对应图1中连续砍道的结构示意图;
23.图5为对应图1中上下坡道的结构示意图;
24.图6为对应图1中悬空式障碍物的结构示意图;
25.图7为对应图1中立柱式障碍物的结构示意图;
26.图8为对应图1中特殊材质障碍物的结构示意图。图中标号:
27.1、测试通道;
28.2、s型弯道;
29.3、直角通道;
30.20、两侧隔挡;
31.30、两侧隔挡;
32.4、连续砍道;
33.5、上下坡道;
34.51、地毯;
35.52、电梯砍道;
36.57、下坡段;
37.58、平直段;
38.59、上坡段;
39.6、悬空障碍物;
40.7、立柱式障碍物;
41.8、特殊障碍单元;
42.81、黑色吸光材质障碍物以及;
43.82、镜面材质障碍物;
44.83、玻璃材质障碍物。
具体实施方式
45.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
46.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
47.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
48.在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
49.现有技术中提供的出厂测试,多是单一测试,存在测试不全面的问题,该种问题会增加出厂测试的反复性和不全面性,增加机器人隐患存在的可能。为了解决上述问题,本实施例中提供了一种智能机器人全场景模拟测试平台,基本覆盖了现有能进行的多种测试项目,能够适应多种实际应用场景,可以及时发现机器人在各种场景中的运行情况。
50.实施例一,本技术首先提出一个测试平台的可实施保护方案:
51.如图1所示,本实施例中提供的智能机器人全场景模拟测试平台,包括环形的测试通道1,所述测试通道1上间隔设有不同的单项测试单元,相邻两个的所述单项测试单元之间的间隔段用于增加机器人的测试行程。
52.本实施例中通过将测试通道1设置成环形,使得机器人可在通道上循环重复跑动,并且,在各个单项测试单元之间增加间隔段,可充分对出厂的机器人进行长距离跑动疲劳测试,得到机器人的良好跑动行程公里数、疲劳跑动公里数以及极限跑动公里数。具体地,可在跑动测试时,在机器人上加设转速检测装置或行程数仪表(类似汽车行程仪表),或者,直接对机器人整个跑动测试过程进行实时监控拍摄全记录,这样,就能有效取得测试数据。当然,也可将测试通道1设置为直线型以用于测试机器人最大速度和急刹车能力,取决于不同测试目的。
53.其中,测试通道1表面材质优选用和酒店环境相近的平整路面(如大理石路面或其
他光滑路面),既保证对,避免共振的发生。有效的保证底盘平稳运行,且不会产生较大的噪音。
54.进一步地,多个单项测试单元包括顺序排布或混合排布的弯道类单元、障碍类单元、坡道类单元以及砍道类单元的任一项或任意组合。以此,尽量模拟出不同的环境,覆盖不同的测试项目。如图1,在本实施例中优选介绍混合排布的组合形式。当然,也可以顺序排布的同一个单项测试单元进行重复间隔测试,或,以顺序排布的多个不同的单项测试单元进行有规则测试。不同的整体测试环境,测试目的和效果是不同的。这样,才能测试全面。
55.以下,对各个不同单项测试单元做具体详述。
56.在本实施例中,如图2和图3所示,所述弯道类单元包括s型弯道2、直角弯道3、u型弯道、w型弯道以及z型弯道的任一或任意组合。
57.作为一种优选技术方案,单个所述弯道类单元包括设于所述测试通道1上的两侧隔挡20/30,通过所述两侧隔挡20/30形成可拆的弯道通道,所述两侧隔挡20/30的相对内壁一侧设有防撞缓冲带,所述弯道通道的宽度大于所述机器人的最大外形宽度,所述两侧隔挡20/30与所述机器人的最大外形宽度之间的间距不超过0.1m。以此,当机器人进入弯道通道时,机器人本身所携带的传感器、雷达以及超声波等会及时感应到异形弯道的情况,由于两侧隔挡20/30十分靠近机器人,显得弯道相对狭窄(宽度1米
‑
0.7米),进而有效地测试机器人的避障转弯能力。
58.进一步地,为了有效进行机器人应对连续过砍能力,如图4所示,在本实施中,所述砍道类单元包括多道间隔的连续砍道4,三个间隔1.5m的连续圆弧形坎道,每个坎道宽度为2cm,高0.5cm,可以测试机器连续过坎能力。
59.同时,为了模拟测试坡道,如图5所示,本实施例中,所述坡道类单元包括上下坡道5,所述上下坡道5包括上坡段、平直段以及下坡段,所述上下坡道5上铺设有不同的地毯51,所述平直段上设有过电梯砍道52。上下坡道5:通行宽度为0.8m,上下坡角度为5
°
,坡道长度为1.5m;上下坡之间有一段直道,直道包含过2cm至厚1m长的地毯51,和一个2cm高
‑
3.5cm宽的一个缝隙,此缝隙为模拟进出电梯的坎52;以此,可以测试机器上下坡,过地毯,进出电梯的通过性能。这里的地毯,可以是,短毛和长毛两种不同的地毯51。
60.最后,为了模拟测试各种障碍物,如图6至图8所示,所述障碍类单元包括特殊障碍单元、立柱式障碍单元以及悬空障碍单元的任一项或任意组合。
61.作为一种优选技术方案,如图6所示,所述悬空障碍单元包括相对于所述测试通道1位于不同高度的悬空体或悬空面或悬空点以供测试机器人的高度方向上是否会碰撞所述悬空体或所述悬空面或所述悬空点。具体地,两个u型卧躺悬空障碍物6高度分别为0.5m和0.8m,可测试机器对悬空障碍物的识别。该类障碍物6可以是u型块、悬挂于空中的灯饰或者悬挂的提示板等。
62.作为一种优选技术方案,如图7所示,所述立柱式障碍单元包括错开排布的多个立柱体7。具体地,连续障碍物包含:多跟立柱式障碍物7,立柱高度为1m,可测试机器在复杂障碍物中的通过性。
63.作为一种优选技术方案,如图8所示,所述特殊障碍单元8包括黑色吸光材质障碍物81、镜面材质障碍物82以及玻璃材质障碍物83的任一个或任意组合。具体地,特殊材质障碍物8包含:黑色吸光、镜面、玻璃三种特殊材质,三个障碍物尺寸均为长1m高0.5m,测试机
器对此三种材质障碍物的识别。
64.在实际进行测试实施时,可把刚组装完毕出厂的机器人,从测试通道1的左端依序进行测试,持续一段时间后,即可得到一定的测试数据;或者,把出厂的机器人从测试通道1的右端依序进行测试,持续一段时间后,即可得到另一方面的测试数据;亦或者,把机器人放置到测试通道1的任一单项测试单元处进行测试,方便于现场测试人员按不同要求进行实施测试。
65.实施例二,本技术另提出一个优选顺序排布的保护方案:
66.如图1所示,由测试通道1左端至右端,各个单项测试单元可以这样排序:左端第一个放置s型弯道2,间隔一段测试通道1路段后,顺序第二位置放置上下坡道5,之后,放置连续砍道4,便到达测试通道1的右端,在通道右端回拐的u型弯处放置直角弯道3,之后由测试通道1的右端向左端行进,间隔一段测试通道1路段后,放置两个u型卧躺悬空障碍物6,间隔一段测试通道1路段后,放置立柱式障碍物7,之后,在测试通道1左端最后一个位置放置特殊材质障碍物8。以此,可测试机器人的避障系统性应变能力,容易使得机器人暴露出潜在隐患问题。
67.实施例三,本技术还提出一个对于测试平台的优选集合保护方案:
68.如图1至图8所示,本实施例中,提供的如图1所示,本实施例中提供的智能机器人全场景模拟测试平台,包括环形的测试通道1,所述测试通道1上间隔设有不同的单项测试单元,相邻两个的所述单项测试单元之间的间隔段用于增加机器人的测试行程。本实施例中通过将测试通道1设置成环形,使得机器人可在通道上循环重复跑动,并且,在各个单项测试单元之间增加间隔段,可充分对出厂的机器人进行长距离跑动疲劳测试,得到机器人的良好跑动行程公里数、疲劳跑动公里数以及极限跑动公里数。具体地,可在跑动测试时,在机器人上加设转速检测装置或行程数仪表(类似汽车行程仪表),或者,直接对机器人整个跑动测试过程进行实时监控拍摄全记录,这样,就能有效取得测试数据。当然,也可将测试通道1设置为直线型以用于测试机器人最大速度和急刹车能力,取决于不同测试目的。其中,测试通道1表面材质选用和酒店环境相近的平整路面(如大理石路面或其他光滑路面),既保证对,避免共振的发生。有效的保证底盘平稳运行,且不会产生较大的噪音。进一步地,多个单项测试单元包括顺序排布或混合排布的弯道类单元、障碍类单元、坡道类单元以及砍道类单元的任一项或任意组合。以此,尽量模拟出不同的环境,覆盖不同的测试项目。如图1,在本实施例中介绍混合排布的组合形式。当然,也可以顺序排布的同一个单项测试单元进行重复间隔测试,或,以顺序排布的多个不同的单项测试单元进行有规则测试。不同的整体测试环境,测试目的和效果是不同的。这样,才能测试全面。在本实施例中,如图2和图3所示,所述弯道类单元包括s型弯道2、直角弯道3、u型弯道、w型弯道以及z型弯道的任一或任意组合。单个所述弯道类单元包括设于所述测试通道1上的两侧隔挡20/30,通过所述两侧隔挡20/30形成可拆的弯道通道,所述两侧隔挡20/30的相对内壁一侧设有防撞缓冲带,所述弯道通道的宽度大于所述机器人的最大外形宽度,所述两侧隔挡20/30与所述机器人的最大外形宽度之间的间距不超过0.1m。以此,当机器人进入弯道通道时,机器人本身所携带的传感器、雷达以及超声波等会及时感应到异形弯道的情况,由于两侧隔挡20/30十分靠近机器人,显得弯道相对狭窄(宽度1米
‑
0.7米),进而有效地测试机器人的避障转弯能力。进一步地,为了有效进行机器人应对连续过砍能力,如图4所示,在本实施中,所述砍道类单
元包括多道间隔的连续砍道4,三个间隔1.5m的连续圆弧形坎道,每个坎道宽度为2cm,高0.5cm,可以测试机器连续过坎能力。同时,为了模拟测试坡道,如图5所示,本实施例中,所述坡道类单元包括上下坡道5,所述上下坡道5包括上坡段59、平直段58以及下坡段57,所述上下坡道5上铺设有不同的地毯51,所述平直段上设有过电梯砍道。上下坡道5:通行宽度为0.8m,上下坡角度为5
°
,坡道长度为1.5m;上下坡之间有一段直道,直道包含过2cm至厚1m长的地毯,和一个2cm高
‑
3.5cm宽的一个缝隙,此缝隙为模拟进出电梯的坎;以此,可以测试机器上下坡,过地毯51,进出电梯的通过性能。这里的地毯,可以是,短毛和长毛两种不同的地毯51。最后,为了模拟测试各种障碍物,如图6至图8所示,所述障碍类单元包括特殊障碍单元、立柱式障碍单元以及悬空障碍单元的任一项或任意组合。如图6所示,所述悬空障碍单元包括相对于所述测试通道1位于不同高度的悬空体或悬空面或悬空点以供测试机器人的高度方向上是否会碰撞所述悬空体或所述悬空面或所述悬空点。具体地,两个u型卧躺悬空障碍物6高度分别为0.5m和0.8m,可测试机器对悬空障碍物的识别。该类障碍物6可以是u型块、悬挂于空中的灯饰或者悬挂的提示板等。如图7所示,所述立柱式障碍单元包括错开排布的多个立柱体7。具体地,连续障碍物包含:多跟立柱式障碍物,立柱高度为1m,可测试机器在复杂障碍物中的通过性。如图8所示,所述特殊障碍单元8包括黑色吸光材质障碍物81、镜面材质障碍物82以及玻璃材质障碍物83的任一个或任意组合。具体地,特殊材质障碍物8包含:黑色吸光、镜面、玻璃三种特殊材质,三个障碍物尺寸均为长1m高0.5m,测试机器对此三种材质障碍物的识别。
69.上述实施方案作为最具体保护方案能充分在测试现场集合应用。
70.此外,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。