一种基于扫描振镜的成像系统及成像方法
1.相关申请的交叉引用
2.本技术要求于2020年12月31日提交中国专利局的申请号为202011631864.5、名称为“一种基于扫描振镜的成像系统及成像方法”的中国专利申请的优先权,其全部内容通过引用结合在本技术中。
技术领域
3.本技术涉及成像领域,特别涉及一种基于扫描振镜的成像系统及成像方法。
背景技术:
4.现有成像方式主要分为面阵相机成像和线阵相机成像两种。
5.面阵相机芯片都是面阵的,即长方形的,所以,面阵相机拍照的时候,得到的是一张方形的图像。此成像方式适合拍摄静止的物体,由于分辨率较大,每次成像整体曝光成像,而每次成像输出的时间较长,拍摄频率能够达到ms级,但是,当拍摄快速移动的物体时,容易产生拖影,影响成像质量,为了保证成像质量,采用面阵相机成像方式时,必须提高光源亮度,或者(并且)减少曝光时间。
6.线阵相机芯片是一行或者多行(一般不超过三行)的感光芯片,拍照时,通过机械运动(相机运动或者被拍物移动),在相机与被拍物体之间形成相对运动,从而得到拍摄的图像。虽然此成像方式拍摄速度快,能够达到us级,但由于拍摄间隔固定,在运动方向,拍摄不同物距的物体,拍摄图像上会存在图像畸变,且畸变率与物体与相机的距离有关,具体为:近端压缩,远端拉伸。并且当物体静止时,相机的运动范围直接决定相机的拍摄视野,拍摄体积较大的物体时,相机必须具有足够大的移动空间。
7.对于以上两种成像方式,相应地有,面阵相机整体曝光导致拍摄频率较慢,而线阵相机拍摄需要相对运动才可获取图像,现有技术无法应对不同光源条件下或者(以及)被拍物不同运动状态下的成像需求。
8.因此,为解决上述问题需要一种基于扫描振镜的成像系统及成像方法。
技术实现要素:
9.为了克服现有技术存在的不足,本技术提供了一种基于扫描振镜的成像系统及成像方法,可以实现每帧图像在特定条件下成像,并且不影响拼接大图的采集频率,所述技术方案如下:
10.一方面,本技术提供了一种成像系统,包括:
11.成像模块,所述成像模块包括成像窗口以及设置在所述成像窗口内侧的成像单元;
12.光源,所述光源设置在所述成像模块的成像窗口内侧,并通过所述成像窗口出射光线;
13.反光镜,所述反光镜与所述成像模块的成像窗口相对设置,用于将所述光源出射
的光线反射至所述目标物体上;
14.转动机构,用于驱动所述反光镜转动,以使所述反光镜反射的光线在所述目标物体上移动;
15.控制器,所述控制器与所述成像模块和转动机构连接,用于协同控制所述转动机构转动以及控制所述成像模块曝光。
16.进一步地,所述成像模块为线阵相机或在芯片高度方向可裁剪的面阵相机。
17.进一步地,所述成像模块还包括图像处理单元,所述图像处理单元用于对所述成像单元所成的图像进行拼接处理。
18.进一步地,所述成像单元的光轴与所述光源的光线出射方向一致。
19.进一步地,所述光源的开关与所述控制器连接。
20.另一方面,本技术提供了一种成像方法,包括以下步骤:
21.s1、将反光镜转动至初始位置;
22.s2、控制转动机构驱动所述反光镜以预设的角速度由所述初始位置向终点位置转动,以使目标物体的待成像区域按一定方向依次被光源出射到反光镜后反射的光线照亮,同时控制成像模块以预设的频率进行图像采集;
23.s3、将采集到的图像按序拼接,得到所述目标物体的二维成像。
24.进一步地,步骤s2中所述预设的角速度和预设的频率满足以下条件:
25.其中,ω为反光镜的转动角速度,f为成像模块的图像采集频率,α为相机出射到反光镜后反射的沿扫描方向的相机拍摄角。
26.进一步地,所述光源为常亮,或者,所述光源在至少所述成像模块进行图像采集的过程中被点亮。
27.进一步地,所述成像模块的图像采集帧率范围为10帧/秒至500k帧/秒。
28.进一步地,适用于对静态的目标物体或动态的目标物体进行成像。
29.本技术提供的技术方案带来的有益效果如下:
30.将面阵成像分割成很多一行或多行图像拼接起来,极大地缩短了每一帧数据之间的采集间隔时间;
31.可以实现每帧图像在特定条件(不同的光源条件、不同的运动状态等)下成像,又不影响拼接大图的采集频率;
32.不仅可以用于拍摄静态物体,还可用于室外高速动态成像领域。
附图说明
33.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
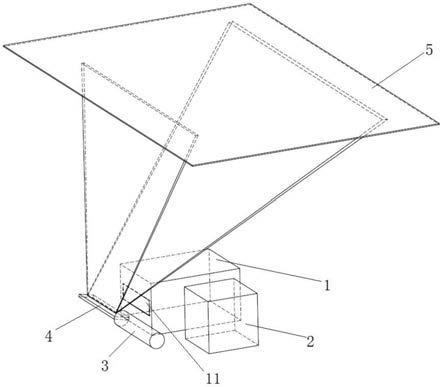
34.图1是本技术实施例提供的基于扫描振镜的成像系统的结构框图;
35.其中,附图标记包括:1
‑
成像模块,11
‑
成像窗口,2
‑
控制器,3
‑
转动机构,4
‑
反光镜,5
‑
目标物体。
具体实施方式
36.为了使本技术领域的人员更好地理解本技术方案,更清楚地了解本技术的目的、技术方案及其优点,以下结合具体实施例并参照附图对本技术实施例中的技术方案进行清楚、完整地描述。需要说明的是,附图中未绘示或描述的实现方式,为所属技术领域中普通技术人员所知的形式。另外,虽然本文可提供包含特定值的参数的示范,但应了解,参数无需确切等于相应的值,而是可在可接受的误差容限或设计约束内近似于相应的值。显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。除此,本技术的说明书和权利要求书中的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
37.在本技术的一个实施例中,提供了一种基于扫描振镜的成像系统,用于对目标物体5成像,如图1所示,所述成像系统包括成像模块1、光源、反光镜2、转动机构3和控制器4。
38.所述成像模块1具有成像窗口11、成像单元以及图像处理单元,其中,所述成像单元设置在所述成像窗口11的内侧,所述图像处理单元用于对所述成像单元所成的图像进行拼接处理;所述光源设置在所述成像模块1的成像窗口11内侧,所述光源通过所述成像窗口11出射光线;所述反光镜4与所述成像模块1的成像窗口11相对设置,所述反光镜4用于将所述光源出射的光线反射至所述目标物体5上;所述转动机构3用于驱动所述反光镜4转动,以使所述反光镜4反射的光线在所述目标物体5上移动;所述控制器2与所述成像模块1、所述光源的开关以及所述转动机构3连接,所述控制器2用于协同控制所述转动机构3转动以及控制所述成像模块1曝光。
39.具体地,所述控制器2发出指令使所述成像模块1开始采集第一帧图像,图像采集帧率范围为10帧/秒至500k帧/秒,所述成像模块1的单帧图像采集时间为us级,也可以为ms级,所述成像模块1收到成像指令后,所述成像模块1中的成像单元开始工作,同时,所述控制器2控制所述光源的开关为开启状态,所述光源通过所述成像窗口11出射光线,与所述成像窗口11相对设置的所述反光镜4将所述光源出射的光线反射至所述目标物体5上,如图1所示,所述第一帧图像为一长条状的图像。待所述第一帧图像采集完成后,所述控制器2控制所述转动机构3驱动所述反光镜4转动一角度,使拍摄位置移动至所述第一帧图像的相邻位置,启动成像模块1采集第二帧图像,并与前面所述第一帧图像拼接起来,以此类推,直至所述控制器2控制所述转动机构3将拍摄位置移动至终点位置,启动所述成像模块1采集最后一帧图像,并将所有图像拼接起来,精确合成一张完整无畸变的图像。
40.需要说明的是,所述成像模块1可以为线阵相机,也可以为面阵相机,针对面阵相机,在面阵相机的芯片高度方向上裁剪可以提高面阵相机的采集速度,所以,优选在芯片高度方向可裁剪的面阵相机,但不作具体限定。另外,所述成像单元的光轴与所述光源的光线出射方向一致,以保证图像的完整无畸变。再者,所述光源可以常亮,也可以在所述成像模块1进行图像采集的过程中被点亮,不以此限定本技术要求的保护范围。
41.转动机构3用于带动反光镜4转动,以将成像模块1的成像位置定位到目标物体5上的不同区域。控制器2用于精确控制转动部件的转动,使成像模块1每一时刻拍摄的图像最
后可以精确的合成一幅完整的无畸变图像。具体的工作流程如下:
42.初始位置:控制器2控制成像模块1采集一帧图像,为长条状的图像,采集帧率的范围为10帧/秒至500k帧/秒;
43.中间位置:控制器2控制转动机构3将拍摄位置移动至前一帧图像的相邻位置,启动成像模块1采集一帧图像,并与前面图像拼接起来;
44.终点位置:控制器2控制转动机构3将拍摄位置移动至终点位置,启动成像模块1采集一帧图像,并将所有图像拼接起来,输出一张完整二维图像。
45.针对上述成像系统,其中的成像方法包括以下步骤:
46.s1、将反光镜转动至初始位置;
47.s2、控制转动机构驱动所述反光镜以预设的角速度由所述初始位置向终点位置转动,以使目标物体的待成像区域按一定方向依次被光源出射到反光镜后反射的光线照亮,同时控制成像模块以预设的频率进行图像采集;
48.s3、将采集到的图像按序拼接,得到所述目标物体的二维成像。
49.在本技术的一个优选实施例中,上述步骤s2中所述预设的角速度和预设的频率满足以下条件:
[0050][0051]
其中,ω为所述反光镜4的转动角速度,f为所述成像模块1的图像采集频率,α为相机出射到反光镜后反射的沿扫描方向的相机拍摄角,k为比例系数,当k为1时,所成图像无拉伸压缩现象,当k<1时,所成图像沿扫描方向压缩,当k>1时,所成图像沿扫描方向拉伸,所述扫描方向即为初始位置向终点位置的方向。在实际应用过程中,一般需要获取无拉伸压缩现象的图像,故k一般取1,则步骤s2中所述预设的角速度和预设的频率满足以下条件:
[0052][0053]
需要注意的是,所述成像模块1的单帧图像采集时间为us级,也可以为ms级,不以此限定本技术要求的保护范围。
[0054]
需要说明的是,本技术并不限定相邻两次成像之间所述反光镜4转动角度为相机出射到所述反光镜4后反射的沿扫描方向的相机拍摄角,只是越接近沿扫描方向的相机拍摄角的角度,则成像越完整无畸变。
[0055]
本成像方法实施例的思想与上述实施例中成像系统的工作过程属于同一思想,通过全文引用的方式将上述成像系统实施例的全部内容并入本成像方法实施例,不再赘述。
[0056]
所述成像系统及成像方法不仅适用于静态的目标物体,还适用于动态的目标物体,突破了现有技术无法应对被拍物不同运动状态下的局限性,同时,也不再受限于光源条件以及目标物体5的体积大小,当对动态目标进行成像,需根据目标速度,实时调整反光镜4的转动角速度,当目标沿着扫描方向相对运动时,增大反光镜4转动角速度,当目标沿着扫描方向反方向运动时,减小反光镜4转动角速度。
[0057]
本技术将面阵成像分割成很多一行或多行图像拼接起来,极大地缩短了每一帧数据之间的采集间隔时间,可以实现每帧图像特定条件成像(不同的光源条件等等),又不影响拼接大图的采集频率,可用于接触网悬挂成像、轮对踏面成像等室外高速动态成像领域。
[0058]
以上所述仅为本技术的较佳实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。