1.本实用新型涉及到巡检机器人设备领域,具体涉及到自主移动巡检机器人的驱动车轮。
背景技术:
2.目前,中国石化行业大力推动智能化、信息化和无人值守站场的建设,因此,需要开发自主移动巡检机器人以代替日常的人工巡检。由于无人值守站场地形复杂,自主移动巡检机器人的行走机构需要较大的驱动力,而目前常用的自主移动机器人的行走机构一般采用电机通过由内齿圈、行星轮和太阳轮组成的普通行星齿轮机构减速器减速增扭后驱动车轮的行驶,普通行星齿轮机构的减速比小,扭矩增加有限,要产生较大的驱动力就需要增加普通行星齿轮的传动比或者采用大功率的驱动电机,尺寸大,成本高。
技术实现要素:
3.本实用新型所要达到的目的是:设计一种能够克服现有巡检机器人行走机构的弊端,且达到尺寸小、成本低的效果。
4.为了实现上述目的,本实用新型提供的技术方案是:
5.一种自主移动巡检机器人的驱动车轮,包括车轮总成、减速器、驱动电机;所述减速器包括:固定内齿圈、活动内齿圈、公用行星轮总成、太阳轮、和减速器壳体;所述公用行星轮总成与所述太阳轮、所述活动内齿圈和所述固定内齿圈啮合;所述活动内齿圈通过第一滚动轴承支承并安装于所述减速器壳体的内孔中;所述固定内齿圈左侧内圆面与所述活动内齿圈右侧外圆面配合并固定在所述减速器壳体内;所述太阳轮两端用两个第二滚动轴承分别支承于所述活动内齿圈和端盖的内孔中。所述太阳轮右侧与所述驱动电机的输入端固定连接;所述端盖与减速器壳体固定在一起;所述活动内齿圈、太阳轮和驱动电机的同心设置;所述车轮总成安装在所述活动内齿圈左侧的输出轴上。
6.进一步的,所述公用行星轮总成由行星轮芯轴、沉头螺钉、行星架、行星齿轮减摩垫圈、行星轮衬套、行星轮组成;所述行星轮内孔压入所述行星轮衬套并套装在所述行星轮芯轴上,所述行星轮芯轴两端分别用沉头螺钉与两端的所述行星架固定连接,两端的所述行星架内侧面与所述行星轮之间各放置一个行星齿轮减摩垫圈,所述行星齿轮减摩垫圈也套装在所述行星轮芯轴上。
7.进一步的,所述减速器壳体的内孔和所述活动内齿圈的输出端采用第一油封密封。
8.进一步的,所述固定内齿圈左侧内圆面为锥面,与所述活动内齿圈右侧外圆面的锥面配合并用多个第一弹簧垫圈和第一内六角螺栓固定在所述减速器壳体内。
9.进一步的,所述端盖外侧内孔和所述太阳轮轴径之间采用第二油封密封;所述端盖用多个第二弹簧垫圈和第二内六角螺栓与所述减速器壳体固定在一起,二者之间采用密封垫片密封。
10.进一步的,所述车轮总成以花键或平键的形式安装在所述活动内齿圈左侧的输出轴上,并用车轮锁紧螺母锁紧。
11.进一步的,所述驱动电机为稀土永磁无刷直流电机。
12.进一步的,所述活动内齿圈的齿数比所述固定内齿圈的齿数多1
‑
3个齿。
13.进一步的,所述行星轮的数量为2
‑
6个。
14.本实用新型解决其技术问题所采用的技术方案是:驱动车轮由车轮总成、减速器和驱动电机等组成,其中,减速器以固定内齿圈、活动内齿圈、公用行星轮总成和太阳轮组成的行星齿轮机构为主传动机构。驱动电机输入动力,驱动太阳轮旋转,太阳轮通过公用行星轮总成驱动活动内齿圈转动输出动力,以带动安装在活动内齿圈输出轴上的车轮转动,驱动自主移动巡检机器人的行驶。活动内齿圈的齿数比固定内齿圈的齿数多1
‑
3个齿,通过改变齿数差,可以改变减速器的传动比,以适应不同自主移动巡检机器人的行走机构的需要。
15.本实用新型的有益效果是,增加了减速机构的传动比,可以采用较小功率的驱动电机产生较大的驱动力,能够满足无人值守站场复杂地形下自主移动巡检机器人的行走需要,而减速机构尺寸增加有限,电机的尺寸和功率较小,结构简单,成本低。
附图说明
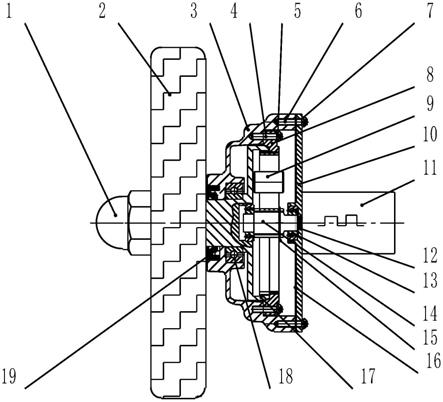
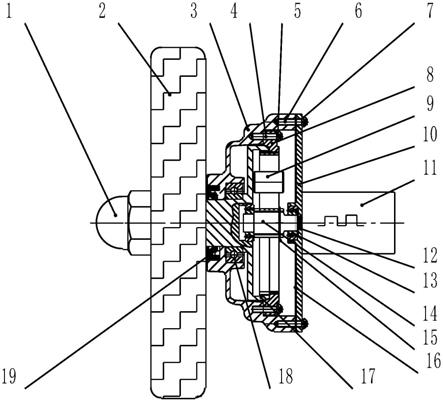
16.图1为本实用新型的结构示意图。
17.图2为本实用新型的公用行星轮总成示意图。
18.图3为本实用新型的公用行星轮总成示意图的a
‑
a剖视图。
19.图中:1.车轮锁紧螺母,2.车轮总成,3.减速器壳体,4.第一内六角螺栓,5.第一弹簧垫圈,6.第二内六角螺栓,7.第二弹簧垫圈,8.固定内齿圈,9.公用行星轮总成,10.端盖,11.驱动电机,12.第二油封,13.第二滚动轴承,14.太阳轮,15.挡圈,16.密封垫片,17.活动内齿圈,18.第一滚动轴承,19.第一油封,20.行星轮芯轴,21.沉头螺钉,22.行星架, 23.行星齿轮减摩垫圈,24.行星轮衬套,25.行星轮
具体实施方式
20.如图1
‑
3所示,一种自主移动巡检机器人的驱动车轮,包括车轮总成2、减速器、驱动电机11;所述减速器包括:固定内齿圈8、活动内齿圈17、公用行星轮总成9、太阳轮14、和减速器壳体3;所述公用行星轮总成9与所述太阳轮14、所述活动内齿圈17和所述固定内齿圈8啮合,为防止公用行星轮总成9左右窜动,需要在其右侧以挡圈15轴向定位或采用其他可行的定位措施;所述活动内齿圈17通过第一滚动轴承18支承并安装于所述减速器壳体3的内孔中;所述减速器壳体3的内孔和所述活动内齿圈17的输出端采用第一油封19密封;所述固定内齿圈8左侧内圆面与所述活动内齿圈17右侧外圆面配合并固定在所述减速器壳体3内;所述太阳轮14两端用两个第二滚动轴承13分别支承于所述活动内齿圈17和端盖10的内孔中。所述太阳轮14右侧与所述驱动电机11的输入端固定连接;所述端盖 10外侧内孔和所述太阳轮14轴径之间采用第二油封12密封;所述端盖10 用多个第二弹簧垫圈7和第二内六角螺栓6与所述减速器壳体3固定在一起,二者之间采用密封垫片16密封;所述端盖10与减速器壳体3之间需采用定位措施以保证所述活动内齿圈17、太阳轮14和驱动电机11同心;
所述车轮总成2安装在所述活动内齿圈17左侧的输出轴上。所述车轮总成 2以花键或平键的形式安装在所述活动内齿圈17左侧的输出轴上,并用车轮锁紧螺母锁紧。
21.进一步的,所述公用行星轮总成由行星轮芯轴20、沉头螺钉21、行星架22、行星齿轮减摩垫圈23、行星轮衬套24、行星轮25组成;所述行星轮25内孔压入所述行星轮衬套24并套装在所述行星轮芯轴20上,所述行星轮芯轴20两端分别用沉头螺钉21与两端的所述行星架22固定连接,两端的所述行星架22内侧面与所述行星轮25之间各放置一个行星齿轮减摩垫圈23,所述行星齿轮减摩垫圈23也套装在所述行星轮芯轴20上。
22.进一步的,所述固定内齿圈8左侧内圆面为锥面,与所述活动内齿圈 17右侧外圆面的锥面配合并用多个第一弹簧垫圈5和第一内六角螺栓4固定在所述减速器壳体3内。
23.进一步的,所述驱动电机11为稀土永磁无刷直流电机。
24.进一步的,所述活动内齿圈17的齿数比所述固定内齿圈8的齿数多1
‑
3 个齿。
25.进一步的,所述行星轮25的数量为2
‑
6个,每个行星轮25配备1个行星轮芯轴20、4
‑
8个沉头螺钉21、2个行星齿轮减摩垫圈23和1个行星齿轮衬套24。根据所需传递扭矩的大小,行星轮25的数量做相应的调整,扭矩小则行星轮25的数量少,扭矩大则行星轮25的数量需要增加。行星轮25的数量根据传递扭矩需要在2
‑
6个范围内调整时,行星轮芯轴20、沉头螺钉21、行星齿轮减摩垫圈23、行星轮衬套24等的数量需要根据行星轮25的数量进行相应调整。
26.本实用新型的一种新的自主移动巡检机器人的驱动车轮,该驱动车轮的减速机构是在普通行星齿轮机构的基础上增加一个内齿圈,在机构尺寸增加很小的前提下,增加了减速机构的传动比(减速比),从而可以采用小功率的驱动电机而产生较大的驱动力,既可以降低驱动电机的功率,节约成本,也减小了驱动电机的尺寸。
27.本实用新型的动力传递路线为:驱动电机11
‑
太阳轮14
‑
公用行星轮(9)
ꢀ‑
活动内齿圈17
‑
车轮总成2。
28.本实用新型的传动比为:
[0029][0030]
其中,z
14
为太阳轮14的齿数,z8为固定内齿圈8的齿数,z
17
为活动内齿圈17的齿数。z
17
和z8的齿数差1
‑
3个。通过改变活动内齿圈17和固定内齿圈8之间的齿数差(z
17
‑
z8),可以改变减速器的传动比,以适应不同自主移动巡检机器人的行走机构的需要
[0031]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。