1.本实用新型涉及一种农业机械,特别涉及一种大蒜收获时使用的夹持传输装置,以及安装有该夹持传输装置的大蒜收获机。
背景技术:
2.大蒜是我国广泛种植的经济农作物,目前已有大蒜收获机械主要有两种,一种是简单的挖掘机械,另一种是采用夹拔传输结构的联合收获机械,其中夹拔传输结构均为从自然生长状态的大蒜植株两侧进行垂直夹持,再进行平移提升,如专利申请号为fr8907373、cn2010102048914、cn202010722769x等,这种结构比较适合宽行距种植、不倒伏的大蒜收获,当大蒜种植行距较窄时相邻两行夹持传输就会出现干涉;当大蒜收获之前已经套种棉花、辣椒、玉米等农作物时,目前的夹持传输机构会将已套种的农作物损坏,因此不适合大蒜套种其他农作物的机械收获;另外,当大蒜植株出现倒伏等非正常生长状态时,联合收获机常会出现夹持遗漏现象。出现这些技术问题的主要原因是夹持传输机构的回转平面与收获行大蒜种植平面是垂直的,在夹持传输机构宽度相同的情况下两行之间占据的空间最大,同时倒伏大蒜的茎秆难以自动进入夹持传输机构。由于目前大蒜收获机械的缺陷,人工收获比例仍然很高,收获效率低,劳动强度大。
技术实现要素:
3.本实用新型的目的是为了解决现有大蒜收获机中的技术问题,提出了一种适合窄行距和套种其他农作物的大蒜夹持传输机构,同时有利于倒伏大蒜的夹持传输。
4.为解决上述问题,本实用新型所采用的技术方案是:一种大蒜夹持传输装置,包括安装在机架上的夹持传输机构,所述夹持传输机构构成的夹持回转平面与大蒜种植平面之间的角度大于等于零度、小于九十度。所述夹持回转平面是夹持传输机构上用于夹持大蒜茎秆处的某一点旋转一周的轨迹所在的平面。所述大蒜种植平面是一行大蒜所形成的行直线与大蒜植株所在生长直线形成的平面,通常为通过一行大蒜植株垂直于地面的平面。当夹持回转平面与大蒜种植平面之间的夹角为零度时,夹持回转平面与大蒜种植平面重合或平行,此时夹持传输机构在相邻两行大蒜之间占用的横向空间最少,最适合窄行距或套种其他农作物的大蒜收获;当夹持回转平面与大蒜种植平面夹角逐渐增大时,相应的夹持传输机构占用的横向空间也逐渐增大,当夹持回转平面与大蒜种植平面夹角等于九十度时,即为目前已有的夹持传输机构,此时占用的横向空间最大,最不利于窄行距或套种大蒜的收获。
5.作为本实用新型一种优选方案,所述夹持传输机构前端安装有使大蒜植株倒向夹持传输机构的导向机构。
6.作为本实用新型一种优选方案,将一个或多个上述夹持传输机构安装在一台大蒜联合收获机上,根据行距或套种农作物的情况调节相邻两个夹持传输机构之间的距离,以适应不同的大蒜收获情况。
7.作为本实用新型的一种优选方案,所述夹持传输机构与其下侧的挖掘机构配合,以便准确夹持收获的大蒜并稳固传输。
8.作为本实用新型的一种优选方案,所述夹持传输机构与安装在其后端的大蒜根须、茎秆切割装置配合,以便切除大蒜根须和茎秆。
9.本实用新型所述的夹持传输装置还包括机架以及传动机构,以向夹持传输机构传递动力。
10.与现有技术相比,本实用新型所述技术方案的有益效果是:
11.1)本实用新型通过改变夹持回转平面与大蒜种植平面之间的夹角来适应不同的大蒜收获情况,特别是当两个平面夹角为零度时,最大限度的减少了横向占用空间,适用于窄行距或套种大蒜的收获,填补了国内套种其他农作物大蒜的机械化收获;
12.2)本实用新型所述的夹持传输机构,相对现有夹持传输机构更容易夹持住倒伏大蒜的茎秆,更有利于倒伏大蒜的收获;
13.3)本实用新型结构紧凑,可将多个夹持传输机构安装在一台大蒜联合收获机上,并根据种植情况调节相邻两个夹持传输机构之间的距离,适应性强。
附图说明
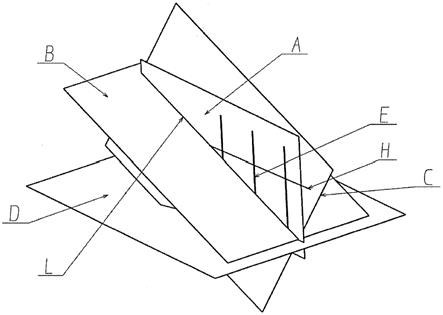
14.图1为夹持传输装置的空间平面结构的示意图。
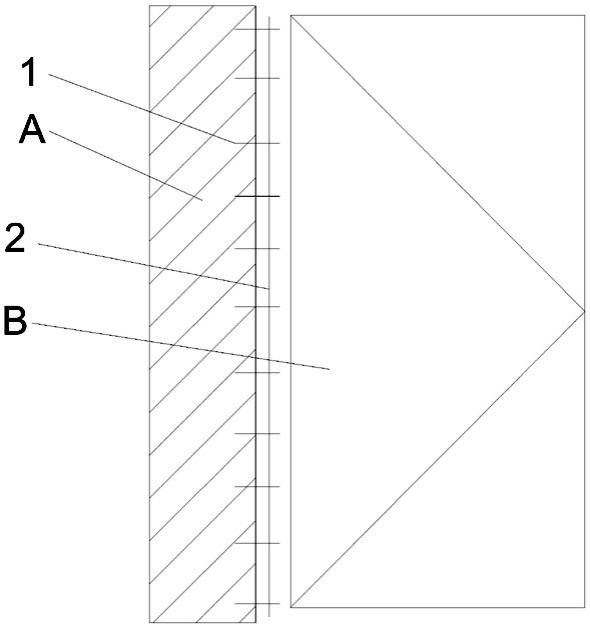
15.图2为一种大蒜夹持传输装置的三维视图。
16.图3为一种大蒜夹持传输装置的右视图。
17.图4为一种大蒜夹持传输装置的左视图。
18.图5为一种大蒜夹持传输装置的正视图。
19.图6为一种大蒜夹持传输装置的局部视图。
20.图7为一种隐藏部分的三维示意图。
21.图8为一种安装有8个夹持传输装置的收获机部分结构的三维示意图。
22.图9为一种安装有8个夹持传输装置的收获机部分结构的另一角度三维示意图。
23.图10为一种倒挂式大蒜根茎切割装置的三维示意图。
24.图11为一种x形大蒜根茎切割装置的三维示意图。
25.其中:a大蒜种植平面,b现有的夹持回转平面,c本实用新型的夹持回转平面,d地平面,l被夹持大蒜移动的轨迹直线,e大蒜生长直线,h大蒜的行直线,1机架,2夹持传输机构,3导向机构、4传动机构、5挖掘机构、6去土机构,7大蒜,8套种的其他农作物,1
‑
1上支架,1
‑
2下支架,2
‑
1上夹持传输机构,2
‑
2下夹持传输机构,2
‑
11上主动轮,2
‑
12上从动链轮,2
‑
13上夹持链条,2
‑
14上拨盘,2
‑
15涨紧机构,2
‑
141上拨杆,2
‑
21下主动轮,2
‑
22下从动链轮,2
‑
23下夹持链条,2
‑
24下拨盘,2
‑
241下拨杆,4
‑
1上主动传动输入轴,4
‑
2下主动输入轴,4
‑
3下主动输入轮,4
‑
4下从动传动轴,4
‑
5下从动输入轮,4
‑
6下传动链,5
‑
1挖掘杆,5
‑
2挖掘铲,9中间转动装置,10大蒜根茎切割装置,10
‑
1切割机架、10
‑
2定位传输装置、10
‑
3切根装置、10
‑
4切茎秆装置,10
‑
5引导支架,10
‑
6x形机架,10
‑
61导轨10
‑
7第一上浮动传输装置,10
‑
8第二上浮动传输装置,10
‑
9第一定位传输装置,10
‑
10第二定位传输装置。
具体实施方式
26.为避免理解分歧,结合图1,有必要对本实用新型中涉及的一些概念做进一步的说明:
27.本实用新型所述的夹持回转平面,是指夹持传输机构上用于夹持大蒜茎秆处的某一点旋转一周所在的平面,如图1中的b和c平面,其中b平面为目前已公开技术方案的夹持回转平面,c为本实用新型所采用技术方案的回转平面。如采用链条夹持大蒜,则链条上夹持大蒜茎秆的点旋转一圈所形成的平面,即为链条的安装平面;当采用皮带夹持大蒜则皮带上一点旋转一周所形成的平面,即为皮带的安装平面。加持回转平面的方向可通过链轮或皮带轮调节。
28.本实用新型所述行直线,是指一行大蒜所在的直线,当一行大蒜种植不在一条直线上时为最小偏差距离所确定的直线,如图1中直线h。
29.本实用新型所述的大蒜生长直线,是指大蒜植株垂直地面自然生长时其植株的中心线,如图1中的直线e。
30.本实用新型所述的大蒜种植平面,是指由大蒜生长直线和大蒜行直线所确定的平面,如图1中的a平面。两平面之间的夹角是指两平面之间的最小夹角,其值大于等于0度、小于等于90度,当两平面垂直时夹角最大即为90度,当两平面平行或重合时其夹角最小即为零度。
31.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
32.实现本实用新型意图的一种技术方案如下:
33.如图1至图7所示,本实用新型所采用的技术方案是:一种大蒜夹持传输装置,包括安装在机架1上的夹持传输机构2,所述夹持传输机构2的回转平面c与大蒜种植平面a之间的夹角大于等0度小于90度,安装在夹持传输机构2前端机架上的用于引导大蒜茎秆进入夹持传输机构2的导向机构3,安装在机架1上为所述夹持传输机构2提供动力的传动机构4,安装在夹持传输机构3前端下边的挖掘机构5,以及安装在机架1下侧的去土机构6。
34.作为本实用新型一种优选方案,所述机架包括相互平行的上支架1
‑
1和下支架1
‑
2两部分,上支架1
‑
1和下支架1
‑
2之间设有供大蒜茎秆通过的通道。
35.作为本实用新型一种优选方案,所述夹持传输机构2包括安装在上支架1
‑
1上的上夹持传输机构2
‑
1和安装在下支架1
‑
2上的下夹持传输机构2
‑
2,上夹持传输机构2
‑
1和下夹持传输机构2
‑
2相互配合共同坚持住大蒜7的茎秆,并在挖掘机构5的配合下将大蒜7向后传输的过程中不断提升大蒜7。
36.作为本实用新型的一种优选方案,所述上夹持传输机构2
‑
1为柔性传输机构,如链条、皮带等,具体包括安装在上支架1
‑
1后端的上主动轮2
‑
11、安装在上支架1
‑
1前端的上从动链轮2
‑
12,安装在上主动轮2
‑
11和上从动轮2
‑
12上的上夹持链条2
‑
13,安装在上从动轮2
‑
12上并随上从动轮2
‑
12一起旋转的上拨盘2
‑
14,以及安装在上支架1
‑
1上的用于调节上夹持链条2
‑
13的涨紧机构2
‑
15。所述上拨盘2
‑
14其上设有一定长度的上拨杆2
‑
141,以拨动大蒜7茎秆进入上夹持链2
‑
13下侧。
37.作为本实用新型的一种优选方案,所述下夹持传输机构2
‑
2为柔性传输机构,如链条、皮带等,具体包括安装在下支架1
‑
2后端的下主动轮2
‑
21、安装在下支架1
‑
2前端的下从动链轮2
‑
22,安装在下主动轮2
‑
21和下从动轮2
‑
22上的下夹持链条2
‑
23,安装在下从动轮2
‑
22上并随下从动轮2
‑
22一起旋转的下拨盘2
‑
24,以及安装在下支架1
‑
2上的用于调节下夹持链条2
‑
23的涨紧机构2
‑
15。所述下拨盘2
‑
24上设有一定长度的下拨杆2
‑
241,以拨动大蒜7茎秆进入下夹持链2
‑
23上侧,同时将倒伏的大蒜7挑起以便夹持传输。
38.作为本实用新型的一种优选方案,所述上夹持传输机构2
‑
1或下夹持传输机构2
‑
2为皮带结构的传输机构,其结构与链条结构相同,在此不再重复叙述。
39.更进一步的,所述上夹持传输机构2
‑
1与下夹持传输机构2
‑
2安装在同一平面内,当与地面垂直时,即与大蒜种植平面a重合或平行,此时夹持传输机构2横向空间最小,最有利于保护套种的其他农作物8,最适合窄行距大蒜7的机械化收获。
40.作为本实用新型的一种优选方案,所述导向机构3,为能够将正常生长的大蒜7茎秆引入夹持传输机构2的机构。当所述夹持传输机构2位于一行大蒜7左侧时,所述导向机构3向左引导大蒜7茎秆并大蒜茎秆向左弯曲,当所述夹持传输机构2位于一行大蒜7右侧时,所述导向机构3向右引导大蒜7茎秆并使大蒜茎秆向右弯曲。
41.作为本实用新型的一种优选方案,所述挖掘机构5,包括安装在夹持传输机构2前端下侧的可调节的挖掘杆5
‑
1,以及安装在挖掘杆5
‑
1前端的挖掘铲5
‑
2。
42.本实用新型所述传动机构4,包括安装上支架1
‑
1的上主动传动输入轴4
‑
1,所述上主动传动输入轴4
‑
1与上主动轮2
‑
11固定安装,通过上主动传动输入轴4
‑
1驱动上夹持传输机构2运转,安装在下支架1
‑
2下端的下主动输入轴4
‑
2,安装在下主动输入轴4
‑
2上的下主动输入轮4
‑
3,安装在下支架1
‑
2上的与下主动轮2
‑
21配合的下从动传动轴4
‑
4,安装在下从动传动轴4
‑
4上的下从动输入轮4
‑
5,以及安装在下主动输入轮4
‑
3和下从动输入轮4
‑
5上的下传动链4
‑
6,下主动传输入轴4
‑
2与上主动输入轴4
‑
1之间按照一定比例运转,以确保下夹持链2
‑
23的线速度与上夹持链2
‑
13的线速度相同,尽而使大蒜7在被夹持传输过程中保持与夹持处的链条相对静止,实现稳固夹持传输。
43.如图8和图9所示,安装有本实用新型所述的一种大蒜夹持传输装置的大蒜联合收获机,包括动力机车,安装动力机车上的固定机架,安装在固定机架上的一个或多个上述夹持传输装置,安装在夹持传输装置后端的中间传动装置9,所述中间转动装置9是使上主动输入轴4
‑
1和下主动输入轴4
‑
2协调运转的装置,安装在所述夹持传输装置后端的大蒜根茎切割装置10,以及安装在大蒜根茎切割装置后端的收集装置。所述动力机车为夹持传输装置、大蒜根茎切割装置、收集装置提供必要的动力。
44.如图10所示,作为本实用新型的一种优选方案,所述的大蒜根茎切割装置10为一种倒挂式大蒜切割装置,用于实现将大蒜茎秆朝下、根须朝上倒挂起来进行定位切割根须和茎秆,主要包括切割机架10
‑
1、定位传输装置10
‑
2、切根装置10
‑
3、切茎秆装置10
‑
4。其中定位传输装置10
‑
2能够将大蒜7倒挂着向切根装置10
‑
3和切茎秆装置10
‑
4方向传输;所述切根装置10
‑
3安装在定位传输装置10
‑
2的上方,并能根据大蒜头的大小上下移动;所述切茎秆装置10
‑
4安装在定位传输装置10
‑
2的下方适当位置。所述切割机架10
‑
1前端设有接收所述夹持传输装置送入的大蒜7并将大蒜7倒挂起来的引导支架10
‑
5。
45.如图11所示,作为本实用新型的另一种优选方案,所述大蒜根茎切割装置为x形的
切割装置,包括x形机架10
‑
6,机架10
‑
6上的四个分支方向上分别设有导轨10
‑
61;所述x形机架10
‑
6的上边的两个分支分别对称安装有第一上浮动传输装置10
‑
7和第二上浮动传输装置10
‑
8,第一上浮动传输装置10
‑
7和第二上浮动传输装置10
‑
8可根据大蒜头的大小沿所在导轨10
‑
61独立移动;所述x形的机架10
‑
6的下侧两个分支上对称安装有第一定位传输装置10
‑
9和第二定位传输装置10
‑
10;在第一上浮动传输装置10
‑
7和第二上浮动传输装置10
‑
8之间设有供大蒜茎秆通过的空隙,在第一定位传输装置10
‑
9和第二定位传输装置10
‑
10之间设有供大蒜根须通过的空隙,第一上浮动传输装置10
‑
7、第二上浮动传输装置10
‑
8、第一定位传输装置10
‑
9、第二定位传输装置10
‑
10成x形分布,第一上浮动传输装置10
‑
7第二上浮动传输装置10
‑
8的下侧与第一定位传输装置10
‑
9第二定位传输装置10
‑
10的上侧供大蒜头通过,并以第一定位传输装置10
‑
7第二定位传输装置10
‑
8上侧为大蒜切除根须的定位基准,在第一定位传输装置10
‑
9第二定位传输装置10
‑
10上侧确定的切割定位基准处的机架上安装有切根装置10
‑
3。
46.上述实例仅用于解释说明本实用新型要求保护的内容,但并不是用于限制本实用新型的要求保护的范围。本领域技术人员对上述实例中各组成部分进行位置改变或组合,如将x形大蒜切割装置中的轮改为皮带或链条结构,或者其他大蒜根茎切割机构等,均属于本实用新型保护范围;本实用新型也可用于洋葱、萝卜等其他农作物的收获,本领域技术人员在本实用新型所述范围内的改进和替换,均属于本实用新型保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。