1.本实用新型涉及放射性污染原料转运设备技术领域,尤其涉及一种自动上下料转运装置。
背景技术:
2.核技术在军事、科研等领域都有广泛研究和应用,开发利用核能也是解决当今能源危机主要的途径之一,深化核技术的应用研究虽有诸多益处,但由此所产生的放射性废物也严重威胁着我们的生活环境。水泥固化放射性废物是将放射性废物与水泥混合在一起,均勾搅拌成糊状,待其凝结后失去流动性,逐渐硬化成固体,然后进行暂存或后续处置,放射性废物水泥固化处理是最早应用于放射性废物处理过程中的方法。放射性废物水泥固化处理的固化厂房与暂存厂房相邻,先将放射性废物固化到特制的桶中,以形成废物桶;然后将废物桶输送到暂存厂房,在暂存厂房内的废物桶送入一侧设有转运起重机,起重机将废物桶吊至暂存区的驻存井中保存,完成废物桶的入井作业,当进行废物桶出井转运作业时,依靠起重机将固化桶从井中吊出,转至专用运输车上,运至做永久处理的地方。在此废物桶的转运过程中,存在工作人员会接触到放射性污染的风险。
技术实现要素:
3.本实用新型提供一种自动上下料转运装置,用以实现废物桶的自动转运,以减少工作人员对放射性污染的接触。
4.本实用新型提供一种自动上下料转运装置,包括搬运装置、转运小车和控制装置;
5.所述搬运装置包括机架、可开合的卡抓和卡抓驱动机构,所述卡抓设于所述机架,所述卡抓驱动机构用于驱动所述卡抓开合、水平移动和上下移动,以通过所述卡抓将储存区域内的废物桶搬运至暂存处;
6.所述转运小车包括滑台、可开合的抓手和抓手驱动机构,所述抓手设于所述滑台,所述抓手驱动机构用于驱动所述抓手开合、水平移动和上下移动,以通过所述抓手将暂存处的废物桶转运至预设位置;
7.所述控制装置电性连接所述卡抓驱动机构和所述抓手驱动机构。
8.根据本实用新型提供一种自动上下料转运装置,所述机架包括横向活动支架、纵向活动支架和两个横梁;
9.两个所述横梁纵向间隔且呈并行设置,所述横向活动支架架设于两个所述横梁,所述横向活动支架在纵向上的两端分别横向滑动地连接两个所述横梁;
10.所述纵向活动支架纵向滑动地连接所述横向活动支架,所述抓手竖向滑动地连接所述纵向活动支架;
11.所述卡抓驱动机构包括第一横向驱动机构、第一纵向驱动机构和第一竖向驱动机构,所述第一横向驱动机构用于驱动所述横向活动支架横向滑动,所述第一纵向驱动机构用于驱动所述纵向活动支架纵向滑动,所述第一竖向驱动机构用于驱动所述抓手竖向滑
动。
12.根据本实用新型提供一种自动上下料转运装置,所述横梁设有沿横向布置的第一直线导轨,所述第一直线导轨的滑块连接所述横向活动支架在纵向上的一端;和/或,
13.所述横向活动支架并行设有两个沿纵向布置的第二直线导轨,两个所述第二直线导轨横向间隔,所述纵向活动支架在横向上的两端分别连接两个所述第二直线导轨的滑块;和/或,
14.所述纵向活动支架并行设有多个沿竖向布置的第三直线导轨,多个所述第三直线导轨沿所述卡抓的周向间隔设置,多个所述第三直线导轨的滑块连接所述卡抓。
15.根据本实用新型提供一种自动上下料转运装置,所述横向活动支架通过沿横向布置的第一齿轮齿条传动机构动力耦合连接所述横梁,所述第一横向驱动机构为第一伺服电机,所述第一伺服电机的转轴连接所述第一齿轮齿条传动机构的齿轮;和/或,
16.所述纵向活动支架通过沿纵向布置的第二齿轮齿条传动机构动力耦合连接所述横向活动支架,所述第一纵向驱动机构为第二伺服电机,所述第二伺服电机的转轴连接所述第二齿轮齿条传动机构的齿轮;和/或,
17.所述卡抓通过沿竖向布置的第三齿轮齿条传动机构动力耦合连接所述纵向活动支架,所述第一竖向驱动机构为第三伺服电机,所述第三伺服电机的转轴连接所述第三齿轮齿条传动机构中的齿轮。
18.根据本实用新型提供一种自动上下料转运装置,所述卡抓包括固定部、安装柱、连接杆和抵接块;
19.所述固定部呈竖向延伸的筒状设置,所述固定部的上端竖向滑动地连接所述纵向活动支架;
20.所述安装柱的上端连接所述固定部的下端,所述安装柱沿所述固定部的周向设有多个;
21.所述连接杆和所述抵接块均对应多个所述安装柱设有多个,每一个所述连接杆的上端转动连接对应的所述安装柱的下端,每一个所述连接杆的下端连接对应的所述抵接块;
22.所述卡抓驱动机构包括第一转动驱动机构,所述第一转动驱动机构对应多个所述连接杆设有多个,用于驱动多个所述连接杆转动,以带动多个所述抵接块相靠拢而夹持废物桶。
23.根据本实用新型提供一种自动上下料转运装置,所述连接杆的下端转动连接所述抵接块,所述连接杆与所述抵接块的连接处设有限位件,所述连接杆与所述抵接块分别设有第一限位孔和第二限位孔,所述限位件的两端分别插设于所述第一限位孔内和所述第二限位孔内。
24.根据本实用新型提供一种自动上下料转运装置,所述滑台包括底座、纵向滑动座和竖向滑动座;
25.所述纵向滑动座具有第一安装面,所述竖向滑动座具有第二安装面,所述第一安装面和所述第二安装面朝向相同且为纵向;
26.所述纵向滑动座纵向滑动地连接所述底座,所述竖向滑动座竖向滑动地连接所述第一安装面;
27.所述抓手包括两个臂座和两个卡夹,两个所述臂座均横向滑动地连接所述第二安装面,两个所述臂座横向相对,两个所述臂座具有相靠近的内侧面,两个所述卡夹分设于两个所述臂座,每一个所述卡夹朝内伸出对应的所述臂座;
28.所述抓手驱动机构包括第二横向驱动机构、第二纵向驱动机构和第二竖向驱动机构,所述第二横向驱动机构用于驱动两个所述臂座横向滑动,所述第二纵向驱动机构用于驱动所述纵向滑动座纵向滑动,所述第二竖向驱动机构用于驱动所述竖向滑动座竖向滑动。
29.根据本实用新型提供一种自动上下料转运装置,所述第二安装面设有两个横向布置的滚珠丝杆机构,两个所述滚珠丝杆机构横向间隔相对,两个所述滚珠丝杆机构的丝杆螺母分别连接两个所述臂座;
30.所述第二横向驱动机构为第四伺服电机,所述第四伺服电机通过联轴器连接两个所述滚珠丝杆机构的丝杆相互靠近的一端,以通过所述第四伺服电机同步驱动两个所述滚珠丝杆机构的丝杆转动。
31.根据本实用新型提供一种自动上下料转运装置,所述卡夹包括两个夹臂,所述夹臂的第一端沿竖向的轴线转动地连接所述臂座,所述夹臂的第二端朝内伸出所述臂座;
32.所述臂座设有第一抵接部和第二抵接部,所述第一抵接部相对于两个所述夹臂的第一端靠近所述臂座的内侧面,所述第二抵接部相对于两个所述夹臂的第一端远离所述臂座的内侧面;
33.在两个所述夹臂处于张开角最小的形态下,两个所述夹臂均抵接所述第一抵接部,在两个所述夹臂处于张开角最大的形态下,两个所述夹臂均抵接所述第二抵接部。
34.根据本实用新型提供一种自动上下料转运装置,两个所述夹臂的第一端分别设有第一齿轮部和第二齿轮部,所述第一齿轮部与所述第二齿轮部相啮合。
35.根据本实用新型提供一种自动上下料转运装置,所述底座设有沿纵向布置的第四直线导轨,所述第四直线导轨的滑块连接所述纵向滑动座;和/或,
36.所述第一安装面设有沿竖向布置的第五直线导轨,所述第五直线导轨的滑块连接所述竖向滑动座;和/或,
37.所述第二安装面设有沿横向布置的第六直线导轨,所述第六直线导轨的滑块连接两个所述臂座。
38.本实用新型提供的自动上下料转运装置,能将储存区域内的废物桶从某一指定位置运送到另一个指定位置,并通过转运小车运出或运入转运电梯,减少工作人员对放射性污染的接触。
附图说明
39.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
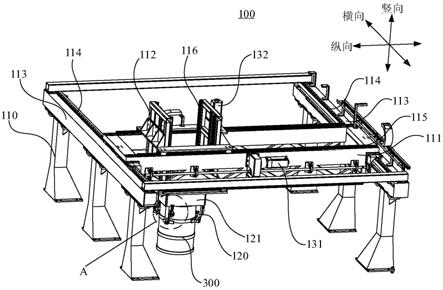
40.图1是本实用新型提供的自动上下料转运装置中搬运装置的结构示意图;
41.图2是图1中a处的局部放大图;
42.图3是图1中搬运装置于另一视角的结构示意图;
43.图4是与图1中搬运装置配合的转运小车的结构示意图;
44.图5是图4中转运小车于另一视角的结构示意图;
45.图6是图4中卡夹处的结构示意图;
46.图7至图11是与图1中搬运装置配合的控制装置的不同显示界面;
47.附图标记:
48.100:搬运装置;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110:机架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111:横向活动支架;
49.112:纵向活动支架;
ꢀꢀꢀꢀꢀꢀ
113:横梁;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114:第一直线导轨;
50.115:第二直线导轨;
ꢀꢀꢀꢀꢀꢀ
116:第三直线导轨;
ꢀꢀꢀꢀꢀꢀ
120:卡抓;
51.121:固定部;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122:安装柱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123:连接杆;
52.124:抵接块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
125:限位件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131:第一横向驱动机构;
53.132:第一纵向驱动机构;
ꢀꢀ
133:第一竖向驱动机构;
ꢀꢀ
134:第一转动驱动机构;
54.200:转运小车;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210:滑台;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211:底座;
55.212:纵向滑动座;
ꢀꢀꢀꢀꢀꢀꢀꢀ
213:竖向滑动座;
ꢀꢀꢀꢀꢀꢀꢀꢀ
220:抓手;
56.221:臂座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222:卡夹;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223:夹臂;
57.224:第一抵接部;
ꢀꢀꢀꢀꢀꢀꢀꢀ
225:第二抵接部;
ꢀꢀꢀꢀꢀꢀꢀꢀ
226:第一齿轮部;
58.227:第二齿轮部;
ꢀꢀꢀꢀꢀꢀꢀꢀ
231:第二横向驱动机构;
ꢀꢀ
232:第二纵向驱动机构;
59.233:第二竖向驱动机构;
ꢀꢀ
234:第四直线导轨;
ꢀꢀꢀꢀꢀꢀ
235:第五直线导轨;
60.236:第六直线导轨;
ꢀꢀꢀꢀꢀꢀ
240:滚珠丝杆机构;
ꢀꢀꢀꢀꢀꢀ
250:联轴器;
61.300:废物桶;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400:托盘。
具体实施方式
62.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
63.下面结合图1
‑
图6描述本实用新型的自动上下料转运装置,如图1和图4所示,该自动上下料转运装置包括搬运装置100、转运小车200和控制装置。
64.如图1
‑
图3所示,搬运装置100包括机架110、可开合的卡抓120和卡抓驱动机构,卡抓120设于机架110,卡抓驱动机构用于驱动卡抓120开合、水平移动和上下移动,以通过卡抓120将储存区域内的废物桶300搬运至暂存处,控制装置电性连接卡抓驱动机构,搬运装置100各项工作由控制装置进行控制和监控。可选地,在一具体实施例中,搬运装置100的起重量为3t,跨度为5.5m,功率为20kw,最大速度为0.3m/s(无级变速),自动定位精度为
±
2mm。
65.具体地,如图1和图3所示,在一具体实施例中,机架110包括横向活动支架111、纵向活动支架112和两个横梁113;两个横梁113纵向间隔且呈并行设置,横向活动支架111架设于两个横梁113,横向活动支架111在纵向上的两端分别横向滑动地连接两个横梁113;纵向活动支架112纵向滑动地连接横向活动支架111,抓手220竖向滑动地连接纵向活动支架
112;卡抓驱动机构包括第一横向驱动机构131、第一纵向驱动机构132和第一竖向驱动机构133,第一横向驱动机构131用于驱动横向活动支架111横向滑动,第一纵向驱动机构132用于驱动纵向活动支架112纵向滑动,第一竖向驱动机构133用于驱动抓手220竖向滑动。搬运装置100采用数控行吊作为废物桶转运的执行机构,主要是完成200l空桶、400l空/满桶从转运小车200上吊走放置在相应的储存架,每个储存架在平台上定位后有唯一的坐标值(以纵向为x轴,以横向为y轴,以竖向为z轴),便于控制系统进行运算驱动行吊机构进行堆放;200l空桶、满桶从储存架到桶内压实机之间根据需要进行来回转移;200l满桶、400l空/满桶从储存架起吊到转运小车200上。
66.并且,如图1所示,在一具体实施例中,横梁113设有沿横向布置的第一直线导轨114,第一直线导轨114的滑块连接横向活动支架111在纵向上的一端,第一直线导轨114能起到横向导向的作用。
67.同样的,如图1所示,横向活动支架111并行设有两个沿纵向布置的第二直线导轨115,两个第二直线导轨115横向间隔,纵向活动支架112在横向上的两端分别连接两个第二直线导轨115的滑块,第二直线导轨115能起到纵向导向的作用。
68.如图1所示,纵向活动支架112并行设有多个沿竖向布置的第三直线导轨116,多个第三直线导轨116沿卡抓120的周向间隔设置,多个第三直线导轨116的滑块连接卡抓120,第三直线导轨116能起到竖向导向的作用。
69.如图1和图3所示,在一具体实施例中,横向活动支架111通过沿横向布置的第一齿轮齿条传动机构动力耦合连接横梁113,第一横向驱动机构131为第一伺服电机,第一伺服电机的转轴连接第一齿轮齿条传动机构的齿轮;和/或,纵向活动支架112通过沿纵向布置的第二齿轮齿条传动机构动力耦合连接横向活动支架111,第一纵向驱动机构132为第二伺服电机,第二伺服电机的转轴连接第二齿轮齿条传动机构的齿轮;和/或,卡抓120通过沿竖向布置的第三齿轮齿条传动机构动力耦合连接纵向活动支架112,第一竖向驱动机构133为第三伺服电机,第三伺服电机的转轴连接第三齿轮齿条传动机构中的齿轮。搬运装置100可以根据需要实现x轴、y轴、z轴三坐标方向移动,x轴通过伺服电机驱动齿轮与导轨齿条啮合,把伺服电机的旋转运动转化为直线运动,实现x轴的移动,移动精度依靠控制系统的半闭环控制系统及齿轮齿条的传动精度来保证。y轴工作原理同x轴。z轴移动由于层高2.9米限制,采用x、y轴的移动方式难以实现,为保证层高及起吊载荷,最终选用两级电动缸进行z轴移动,卡抓120可以采用电动伺服抓手。
70.如图1至图3所示,在一具体实施例中,卡抓120包括固定部121、安装柱122、连接杆123和抵接块124;固定部121呈竖向延伸的筒状设置,固定部121的上端竖向滑动地连接纵向活动支架112;安装柱122的上端连接固定部121的下端,安装柱122沿固定部121的周向设有多个;连接杆123和抵接块124均对应多个安装柱122设有多个,每一个连接杆123的上端转动连接对应的安装柱122的下端,每一个连接杆123的下端连接对应的抵接块124;卡抓驱动机构包括第一转动驱动机构134,第一转动驱动机构134对应多个连接杆123设有多个,用于驱动多个连接杆123转动,以带动多个抵接块124相靠拢而夹持废物桶300。安装柱122、连接杆123和抵接块124构成了卡抓120的卡指,例如,卡抓120设有四个卡指,且四个卡指呈十字分布,有利于提升废物桶300时的稳定性。卡抓120可开合不同大小以适应大桶和小桶。卡抓120卡住废物桶300的上口沿凸台来提供克服重力的反力。z轴电动缸组有效行程1280mm,
z轴安装高度700mm,提升力最大为3吨。搬运装置100的x轴和y轴运行到预定位置后z轴下行,卡抓120张卡,根据大、小钢桶的高度来确定下行高度,到位后卡抓120收紧,然后提升过一个大桶的高度,实现运转。
71.如图3所示,在一具体实施例中,连接杆123的下端转动连接抵接块124,连接杆123与抵接块124的连接处设有限位件125,连接杆123与抵接块124分别设有第一限位孔和第二限位孔,限位件125的两端分别插设于第一限位孔内和第二限位孔内。这有利于抵接块124与废物桶300相贴合,并且,抵接块124具有与废物桶300的形状相适配的弧形抵接面。
72.如图4至图6所示,转运小车200包括滑台210、可开合的抓手220和抓手驱动机构,抓手220设于滑台210,抓手驱动机构用于驱动抓手220开合、水平移动和上下移动,以通过抓手220将暂存处的废物桶300转运至预设位置;控制装置电性连接抓手驱动机构,其中,暂存处设有托盘400,转运小车200各项工作由控制装置进行控制和监控。可选地,在一具体实施例中,搬运装置100的设计负载为3t,行程为5m,举升高度为120mm,功率为5kw,最大速度为0.3m/s(无级变速)。
73.具体地,如图4和图5所示,在一具体实施例中,滑台210包括底座211、纵向滑动座212和竖向滑动座213;纵向滑动座212具有第一安装面,竖向滑动座213具有第二安装面,第一安装面和第二安装面朝向相同且为纵向;纵向滑动座212纵向滑动地连接底座211,竖向滑动座213竖向滑动地连接第一安装面;抓手220包括两个臂座221和两个卡夹222,两个臂座221均横向滑动地连接第二安装面,两个臂座221横向相对,两个臂座221具有相靠近的内侧面,两个卡夹222分设于两个臂座221,每一个卡夹222朝内伸出对应的臂座221;抓手驱动机构包括第二横向驱动机构231、第二纵向驱动机构232和第二竖向驱动机构233,第二横向驱动机构231用于驱动两个臂座221横向滑动,第二纵向驱动机构232用于驱动纵向滑动座212纵向滑动,第二竖向驱动机构233用于驱动竖向滑动座213竖向滑动。可选的,第二横向驱动机构231、第二纵向驱动机构232和第二竖向驱动机构233可以均为伺服电机,在转运小车200的x轴电机、y轴电机和z轴电机的作用下,转运小车200的相关部件会沿x轴、y轴和z轴做轴向运动,分别对应转运小车的前进和后退、废物桶300的夹紧和松开及废物桶300的升起和降下,从而完成废物桶300运出或运入转运电梯的转运作业。
74.如图4和图5所示,在一具体实施例中,底座211设有沿纵向布置的第四直线导轨234,第四直线导轨234的滑块连接纵向滑动座212,转运小车200的前进、后退和固定均通过第四直线导轨234实现。第四直线导轨234一边内侧安装有齿条,配合纵向滑动座212上安装的x轴电机轴上的齿轮,实现纵向滑动座212的移动,从而从电梯里取放废物桶300。其中,x轴电机轴端安装有齿轮,与导轨上的齿条啮合,电机做正反向旋转,从而带动小车沿x轴向移动,实现运小车的前进和后退。
75.如图4和图5所示,在一具体实施例中,第二安装面设有两个横向布置的滚珠丝杆机构240,两个滚珠丝杆机构240横向间隔相对,两个滚珠丝杆机构240的丝杆螺母分别连接两个臂座221;第二横向驱动机构231为第四伺服电机,第四伺服电机通过联轴器250连接两个滚珠丝杆机构240的丝杆相互靠近的一端,以通过第四伺服电机同步驱动两个滚珠丝杆机构240的丝杆转动,并且,第二安装面设有沿横向布置的第六直线导轨236,第六直线导轨236的滑块连接两个臂座221。y轴电机(即第四伺服电机)做正反向旋转,带动两侧两个丝杆(一个左旋、一个右旋)做正反向旋转,再带动两个臂座221沿y轴做开合动作,从而实现两个
卡夹222对废物桶300的夹紧与松开
76.如图4和图5所示,在一具体实施例中,第一安装面设有沿竖向布置的第五直线导轨235,第五直线导轨235的滑块连接竖向滑动座213,转运小车200的z轴电机可通过齿轮齿条带动抓手220沿z轴做上下运动,实现废物桶300的升起和降下,便于转运小车200从转运电梯里取放废物桶300。
77.如图4和图6所示,在一具体实施例中,卡夹222包括两个夹臂223,夹臂223的第一端沿竖向的轴线转动地连接臂座221,夹臂223的第二端朝内伸出臂座221;臂座221设有第一抵接部224和第二抵接部225,第一抵接部224相对于两个夹臂223的第一端靠近臂座221的内侧面,第二抵接部225相对于两个夹臂223的第一端远离臂座221的内侧面;在两个夹臂223处于张开角最小的形态下,两个夹臂223均抵接第一抵接部224,在两个夹臂223处于张开角最大的形态下,两个夹臂223均抵接第二抵接部225,并且,两个夹臂223的第一端分别设有第一齿轮部226和第二齿轮部227,第一齿轮部226与第二齿轮部227相啮合,此种卡夹222能较好地夹住废物桶300。
78.如图4所示,暂存处设有托盘400,托盘400作为废物桶300的暂存处。当转运小车200从转运电梯里取出废物桶300时,转运小车200将废物桶300放在托盘400上,再通过搬运装置100将托盘400上的废物桶300运送至钢桶固定架内;当废物桶300出库时,通过搬运装置100将废物桶300从钢桶固定架内运送至托盘400,在转运小车200的作用下将废物桶300移送至电梯里,然后出库。
79.本实用新型提供的自动上下料转运装置,能将储存区域内的废物桶300从某一指定位置运送到另一个指定位置,并通过转运小车200运出或运入转运电梯,减少工作人员对放射性污染的接触。
80.可选地,在一具体实施例中,搬运装置100和转运小车200均设有行程到位传感器,基于伺服电机控制及行程到位传感器,可实现搬运装置100和转运小车200的准确定位及位置控制。并且,搬运装置100和转运小车200中的伺服电机采用ethercat总线通信,无触点粘连风险,总线掉站后全线停机保持当前状态,在导轨上可自动锁紧固定,确保设备安全。
81.可选地,在一具体实施例中,控制装置设有工业人机界面(例如hmi工业人机界面),通过控制装置可将废物桶指定位置入库和指定位置废物桶出库,具体如下:
82.1、废物桶指定位置入库
83.当废物桶置于起始点时,转运动作开始,转运小车将废物桶抓取、提升并水平运送至转运点,在控制装置的触摸屏上进行手动指定位置或自动入库,搬运装置定位到小车转运小车进行抓取,抓取完成后,运行到指定位置,定位完成后放下废物桶。
84.2、指定位置废物桶出库
85.通过控制装置的触摸屏选择需要出库的废物桶,搬运装置定位到指定位置进行抓取,可靠抓取及锁定后平稳升起,将废物桶运送至转运小车,由其运送至起始位置,转运小车的抓手松开,退回至原位锁紧固定。
86.以下将对自动上下料转运装置的操作方法可以如下:
87.一、桶入库:当点击控制装置的桶入库按钮后,如图7所示,控制装置的触摸屏即切换到桶入库界面,在切换至的界面中可实现对桶入库的操作,其中,入库分为400l、200l的废物桶。
88.1、如图7所示,进入此屏显界面后,显示的是64个绿色按钮,说明此64个桶位全部为空位,还没有堆放桶;
89.2、当点击其中任意一个按钮后,并且把一个400l桶放进电梯里固定位置送入本库房,当转运电梯门打开,转运小车通过传感器自动感应到桶已经到达,自动移动至电梯口与电梯内的辅助装置对接,接着把桶抓取到转运小车上,然后转运小车自动退回至固定位置,这时搬运装置自动过来抓取400l桶,搬运堆放至点击按钮所指示的位置;
90.3、桶堆放好后,此被点击的绿色按钮即变为红色,按钮变为红色后,说明此按钮所指示位置已经堆放了空桶;
91.4、已经堆放过桶的位置,操作员即使再次误操作点击了此位所指示的按钮,搬运装置和转运小车也不会响应及动作;
92.5、其他按钮及空位桶的搬运堆放同上;
93.6、点击“返回操作选择页”按钮,触摸屏会切换至“操作选择”界面。
94.二、桶出库:当点击控制装置的桶出库按钮后,如图8所示,控制装置的触摸屏即切换到桶出库界面,在切换至的界面中可实现对桶出库的操作,其中,出库分为400l、200l的废物桶。
95.1、如图8所示,进入此屏显界面后,凡是装满废物的桶所对应的按钮即为红色按钮,其余皆为绿色按钮;
96.2、当点击其中任意一个按钮后,搬运装置会自动移动至按钮指示的位置抓取废物桶,然后把废物桶送至转运小车上,转运小车感应到有桶后,并且感应到转运电梯已经到达并且电梯门已经打开,转运小车会自动移动至电梯口与电梯内的辅助装置对接,接着会把桶送到电梯里的辅助机构上,然后转运小车自动退回至固定位置;
97.3、此时操作员通过监控系统都可看到,即可操作电梯把桶运出;
98.4、已经搬运过桶的位置,操作员即使再次误操作点击了此位所指示的按钮,搬运装置和转运小车也不会响应及动作;
99.5、其他按钮及废物桶的搬运同上;
100.6、点击“返回操作选择页”按钮,触摸屏会切换至“操作选择”界面。
101.三、调试与设置:当点击控制装置的调试与设置按钮后,如图9所示,控制装置的触摸屏即切换到手动调试及数据设置选择界面,在切换至的界面中可实现对手动调试及数据设置界面的选择操作。
102.图9中的各按钮的功能说明如下:
103.手动调试:当点击此按钮后,触摸屏即自动切换至手动调试界面。在手动调试界面里,可对整个搬运装置、转运小车及桶内压实机进行手动调试操作;数据设置:当点击此按钮后,触摸屏即自动切换到数据设置界面。在数据设置界面里,可对系统进行一些数据设置操作;返回操作选择页:当点击此按钮后,触摸屏会自动切换到操作选择界面。
104.1、手动调试
105.图10为手动调试屏显界面,主要用作调试搬运装置、转运小车及桶内压实机动作,其各按钮的功能说明如下:
106.1.1、转运小车调试:当点击此处按钮时,可对转运小车相关机构进行手动调试;
107.1.2、搬运装置调试:当点击此按钮时,可对搬运装置对应各机构进行手动调试;
108.1.3、桶内压实机调试:当点击此处按钮时,可对桶内压实机各对应机构进行手动调试;
109.1.4、返回操作选择页:当点击此按钮后,触摸屏自动切换至操作选择界面。
110.2、数据设置
111.图11为数据设置屏显界面,主要是对系统运行时需要的一些数据进行设置,操作员无需进入设置。
112.2.1、一键定位,测试画面中,触摸屏上显示各桶的位置,选定后一键到位,行车到指定位置;
113.2.2、一键入库,触摸屏上选中需要入库的位置后,点击一键入库,自动抓取后入库;
114.2.3、一键出库,触摸屏上选中需要出库的位置后,点击一键出库,自动抓取后出库;
115.2.4、自动入库功能,自动入库工况下,检测到转运小车有桶后,安装入库规则自动依次入库;
116.2.5、自动出库功能,自动出库工况下,需要出库,安装出库规则自动依次出库,先入先出或后入先出。
117.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。