1.本发明涉及机械故障诊断技术领域,具体为基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统。
背景技术:
2.在基于振动信号分析的旋转机械健康监测和故障诊断中,由于存在多个振动源以及受复杂传递路径和强噪声影响,测量振动信号通常成分复杂,可能包含高斯白噪声以及谐波分量、强冲击干扰等非高斯干扰成分,导致周期性故障信号十分微弱。
3.为解决最小熵解卷积(minimum entropy deconvolution,med)方法在用于故障诊断时倾向于恢复少量主导冲击而非周期性故障冲击序列的问题,提出了最大平均窗峭度盲解卷积方法。方法定义了一种新盲解卷积指标——平均窗峭度,该指标通过对信号进行加窗均等分割计算各等分段峭度的均值,以抑制因少量主导冲击造成信号峭度过大的问题。方法能实现在高斯白噪声、强冲击干扰下均能准确恢复周期性故障冲击序列,提取故障特征信息。齿轮植入故障案例分析结果表明方法可以实现齿轮微弱周期性故障冲击序列的增强检测,同时与med等传统盲解卷积方法的对比研究进一步突显了所提方法在故障诊断中的优势。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统。
5.本发明的目的是通过以下技术方案来实现的:
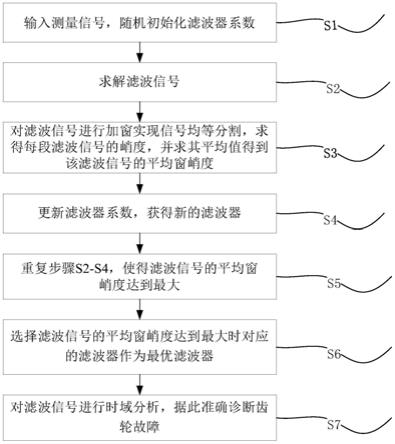
6.基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统,包括以下步骤:
7.s1,输入测量信号,随机初始化滤波器系数,执行步骤s2;
8.s2,求解滤波信号,执行步骤s3;
9.s3,对将滤波信号进行加窗实现信号均等分割,求得每段滤波信号的峭度,并求其平均值得到该滤波信号的平均窗峭度,执行步骤s4;
10.s4,更新滤波器系数,获得新的滤波器,执行步骤s5;
11.s5,重复步骤s2
‑
s4,使得滤波信号的平均窗峭度达到最大,执行步骤s6;
12.s6,选择滤波信号的平均窗峭度达到最大时对应的滤波器作为最优滤波器,执行步骤s7;
13.s7,对滤波信号进行时域分析,据此准确诊断齿轮故障。
14.进一步的,所述步骤s3中,平均窗峭度的获得的表达式为:
[0015][0016]
式中,ak表示滤波信号的平均窗峭度,m为分割段数,y
m
表示第m段信号,k(y
m
)为其
对应的峭度,m取1到m。
[0017]
进一步的,所述k(y
m
)的计算公式为:
[0018][0019]
式中:<
·
>表示时域平均算子。
[0020]
进一步的,所述步骤s5中的重复步骤s2
‑
s4,使得滤波信号的平均窗峭度达到最大,选择最大平均窗峭度对应的滤波器参数,描述此过程公式如下:
[0021][0022]
式中,为当前滤波器系数值,f为滤波器。
[0023]
进一步的,所述步骤s4中,新的滤波器的系数获得的公式为:
[0024][0025]
式中,x0为一矩阵,n为信号长度,y为滤波信号。
[0026]
进一步的,所述步骤4中新的滤波器的系数获得的公式中,所述矩阵式中,l为滤波器长度。
[0027]
进一步的,所述测量信号的卷积形式为:
[0028]
x=e*h
e
n*h
n
[0029]
式中,*代表卷积运算,x为测量信号,e为周期性故障信号,n为干扰成分,h
e
、h
n
分别为e和n对应的传递函数。
[0030]
进一步的,所述干扰成分包括:杂乱冲击干扰、非高斯谐波分量、高斯白噪声。
[0031]
本发明的有益效果是:
[0032]
为解决med倾向于恢复主导冲击的问题,本发明提出了一种新的盲解卷积指标——平均窗峭度,该指标通过对信号进行加窗均等分割计算各等分段峭度的均值,以抑制因少量主导冲击造成信号峭度过大的问题。基于此提出了一种新的盲解卷积方法——最大平均窗峭度盲解卷积方法,该方法解决了传统盲解卷积方法倾向于恢复少量主导冲击而非周期性故障冲击的问题,方法能实现在高斯白噪声、强冲击干扰下均能准确恢复周期性故障冲击序列,提取故障特征信息。
附图说明
[0033]
图1为本发明的流程示意图;
[0034]
图2为本发明的齿轮植入故障测量信号;
[0035]
图3分别为med方法、meda方法、omeda方法、本发明方法得到的故障齿轮测量信号
的滤波信号图(a
‑
med方法、b
‑
meda方法、c
‑
omeda方法、d
‑
本发明方法)。
具体实施方式
[0036]
下面结合本发明的附图1~3,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施。
[0037]
在本发明的描述中,需要理解的是,术语“逆时针”、“顺时针”“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0038]
基于最大平均窗峭度盲解卷积的机械故障诊断方法及系统,包括以下步骤:
[0039]
s1,输入测量信号,随机初始化滤波器系数,执行步骤s2;
[0040]
s2,求解滤波信号,执行步骤s3;
[0041]
s3,对将滤波信号进行加窗实现信号均等分割,求得每段滤波信号的峭度,并求其平均值得到该滤波信号的平均窗峭度,执行步骤s4;
[0042]
s4,更新滤波器系数,获得新的滤波器,执行步骤s5;
[0043]
s5,重复步骤s2
‑
s4,使得滤波信号的平均窗峭度达到最大,执行步骤s6;
[0044]
s6,选择滤波信号的平均窗峭度达到最大时对应的滤波器作为最优滤波器,执行步骤s7;
[0045]
s7,对滤波信号进行时域分析,据此准确诊断齿轮故障。
[0046]
实施例:
[0047]
本实施例进行了齿轮植入故障案例分析以验证方法对实际信号分析的有效性。测量信号采自某机械故障试验台,该故障试验台主要由同步皮带轮、三相交流变频电机、传动轴支座、连轴器、磁粉扭力器、齿轮箱组成。在齿轮箱(减速比55/75)故障模拟实验中,在小齿轮某齿根处通过电火花加工植入了局部点蚀故障,并将加速度计安装在齿轮箱输入轴顶部的壳体上。信号采样频率为5120hz,电机实际测量转速为834rpm(13.9hz)。根据电机转速和齿轮箱规格,测试齿轮(小齿轮)故障特征频率和啮合频率分别为13.9hz和764.5hz。
[0048]
图2给出了信号的时域波形(信号长度为2048)所示。由图可见,时域波形中含有非常明显的谐波干扰成分,故障冲击特征不明显,难以判别故障类型;图3(a)
‑
(d)分别给出了med、meda、omeda和所提方法对测量信号的分析结果。可见,所提方法准确恢复了周期性故障冲击,其周期0.0719s与输入轴小齿轮故障特征频率吻合,虽然其他方法也能观察到故障冲击特征,但冲击特征的周期性不如所提方法滤波信号。本案例分析证实了所提方法对实际故障信号分析的有效性。
[0049]
进一步的,所述步骤s3中,平均窗峭度的获得的表达式为:
[0050]
[0051]
式中,ak表示滤波信号的平均窗峭度,m为分割段数,y
m
表示第m段信号,k(y
m
)为其对应的峭度,m取1到m。
[0052]
进一步的,所述k(y
m
)的计算公式为:
[0053][0054]
式中:<
·
>表示时域平均算子。
[0055]
进一步的,所述步骤s5中的重复步骤s2
‑
s4,使得滤波信号的平均窗峭度达到最大,选择最大平均窗峭度对应的滤波器参数,描述此过程公式如下:
[0056][0057]
式中,为当前滤波器系数值,f为滤波器。
[0058]
进一步的,所述步骤s4中,新的滤波器的系数获得的公式为:
[0059][0060]
式中,x0为一矩阵,n为信号长度,y为滤波信号。
[0061]
进一步的,所述步骤4中新的滤波器的系数获得的公式中,所述矩阵式中,l为滤波器长度。
[0062]
进一步的,所述测量信号的卷积形式为:
[0063]
x=e*h
e
n*h
n
[0064]
式中,*代表卷积运算,x为测量信号,e为周期性故障信号,n为干扰成分,h
e
、h
n
分别为e和n对应的传递函数。
[0065]
进一步的,所述干扰成分包括:杂乱冲击干扰、非高斯谐波分量、高斯白噪声。
[0066]
以上所述仅是本发明的优选实施方式,应当理解所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。