1.本专利涉及一种基于激光雷达测量数据的路况分析方法,属于传感器数据处理与人工智能技术领域。
背景技术:
2.激光雷达是基于激光测距原理,测量传感器与物体之间的距离,并且可以水平和竖直方向上旋转一定角度,实现3d探测,具有检测速度快,分辨率高,测距精度高的优点,因此进入汽车自动驾驶和机器人自主导航领域,成为障碍物检测以及避障不可或缺的检测手段。同时,随着社会的发展及生活水平的提高,具有视觉障碍的人非常迫切走出自己熟悉的生活空间,能够正常外出购物、散步及社会交往,但是由于视觉功能上的欠缺,视觉障碍人员非常容易在行进过程中发生摔倒,可能造成严重的伤害。
技术实现要素:
3.针对上述问题,本专利为了满足视觉障碍人员外出的意愿,提供一种基于激光雷达测量数据的路况分析方法,根据检测数据,分析道路状况,识别凹陷区域和凸起障碍物,并播报提醒,为视觉障碍人员出行提供安全保障。
4.本专利解决其技术问题所采用的技术方案是:
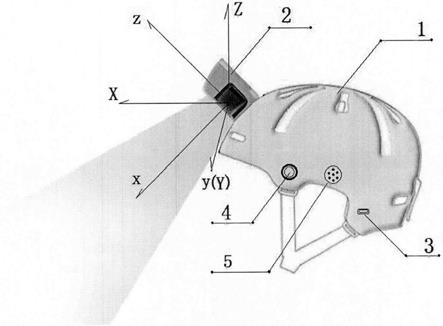
5.一种基于激光雷达测量数据的路况分析方法,所述的激光雷达安装在头盔的前上方,检测方向设置为前下方,所述的头盔两侧设置语音播报的喇叭,所述的头盔侧面设置充电接口和开关按键,所述的头盔内部设置控制器,所述的控制器包括进行集中控制的处理器,与所述的处理器连接的由扁平电机组成的振动器,还包括与所述的充电接口连接的充电电路,所述的充电电路输出连接充电电池,所述的充电电池输出连接电源电路,所述的电源电路输出所述的控制器及其他模块所需的电源,所述的激光雷达,开关按键和喇叭与所述的处理器连接;所述的激光雷达用于检测前方地面的状况,中心位置建立传感器坐标系xyz,x轴指向所述的激光雷达的检测中心方向,与水平方向成β夹角,y轴指向左侧,同时建立世界坐标系xyz,y轴与y轴重合,x轴指向正前方,z轴指向竖直向上,所述的激光雷达输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},其中k=0,1,2...,为检测的序号,α
i
为所述的激光雷达在竖直方向上的检测角度,i为竖直方向上的数据序号,i=0,1,2...n
‑
1,n为所述的激光雷达的线数,j为水平方向上的数据序号,j=0,1,2...,θ为所述的激光雷达在水平方向上的检测角度增量,所述的处理器用于实现路况分析方法,所述的路况分析方法包括以下步骤:
6.(1)每隔固定周期δt,所述的处理器读取所述的激光雷达输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},转换为传感器坐标系下的点[x
ijk
,y
ijk
,z
ijk
]
‑1=[d
ijk
·
cosα
i
·
sin(j
·
θ
‑
θ0),d
ijk
·
cosα
i
·
cos(j
·
θ
‑
θ0),d
ijk
·
sinα
i
],其中θ0为j=0的检测角度;采用坐标转换方法,将点[x
ijk
,y
ijk
,z
ijk
]
‑1转换为世界坐标系下的点
[0007]
(2)在点[x
ijk
,y
ijk
,z
ijk
]
‑1组成的集合中,搜索障碍物,并提取障碍物信息:距离d,方位δ,高度h,宽度w,具体步骤如下:
[0008]
(2a)、搜索点[x
ijk
,y
ijk
,z
ijk
]
‑1在x轴正方向上的邻近点[x
mnk
,y
mnk
,z
mnk
]
‑1,即x
mnk
>x
ijk
,同时[(x
mnk
‑
x
ijk
)2 (y
mnk
‑
y
ijk
)2]
1/2
最小,其中m=0,1,2...n
‑
1,n=0,1,2...,计算δx
ijk
=x
mnk
‑
x
ijk
,δz
ijk
=z
mnk
‑
z
ijk
,以及梯度g
ijk
=δz
ijk
/δx
ijk
;
[0009]
(2b)、当δx
ijk
>t
x
,将点[x
ijk
,y
ijk
,δz
ijk
]
‑1存入数据链表l0,其中t
x
为凹陷区域x激增阈值;当g
ijk
>tg,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l1,t
g
为凸起障碍物梯度阈值;
[0010]
(2c)、遍历完所有的点以后,如果数据链表l0非空,则计算凹陷区域参数:距离d=minx(l0),方位δ=arctan(avergey(l0)/avergex(l0)),高度h=avergeδz(l0),宽度w=maxy(l0)
‑
miny(l0);
[0011]
如果数据链表l1非空,则计算凸起障碍物参数:距离d=minx(l1),方位δ=arctan(avergey(l1)/avergex(l1)),高度h=maxz(l1)
‑
minz(l1),宽度w=maxy(l1)
‑
miny(l1);
[0012]
其中minx,miny和minz分别为计算数据链表中的x坐标,y坐标和z坐标最小值的算式,maxy,maxz为计算数据链表中点的y坐标和z坐标最大值的算式,avergex,avergey和avergeδz为计算数据链表中的x坐标,y坐标和δz均值的算式。
[0013]
(3)如果发现障碍物,所述的处理器通过所述的振动器警示用户,并且通过所述的喇叭播报障碍物信息。
[0014]
本专利的有益效果主要表现在:1、基于激光雷达的检测数据,分析道路状况,识别凹陷区域和凸起障碍物,并进行语音及振动提示,保障视觉障碍人员出行安全2、计算方法简单,运算速度快,可满足实时性要求。
附图说明
[0015]
图1是本发明的外观和坐标系示意图;
[0016]
图2是本发明的凹陷区域检测示意图;
[0017]
图3是本发明的凸起障碍物检测示意图。
具体实施方式
[0018]
下面结合附图对本发明作进一步描述:
[0019]
参照图1
‑
3,为了帮助视觉障碍人员自主出行过程中的路况分析和识别,提供一种基于激光雷达测量数据的路况分析方法。所述的激光雷达2安装在头盔1的前上方,所述的头盔1一方面可以在意外情况下保护用户头部,另一方面也可以安装电子设备。所述的头盔1两侧设置语音播报的喇叭5,可以进行语音播报,进行危险警示;所述的头盔1侧面设置充电接口3和开关按键4,所述的充电接口3可以连接外部充电用的电源。
[0020]
所述的头盔1内部设置控制器,所述的控制器包括进行集中控制的处理器,与所述的处理器连接的振动器,所述的振动器由扁平电机组成,用于进行危险提示。还包括与所述的充电接口3连接的充电电路,所述的充电电路输出连接充电电池,所述的充电电池输出连
接电源电路,所述的电源电路输出所述的控制器及其他模块所需的电源。所述的激光雷达2,开关按键4和喇叭5与所述的处理器连接,实现集中控制。所述的开关按键4用于启动或者关闭所述的控制器。
[0021]
所述的激光雷达2的检测方向设置为前下方,检测前方地面的状况。为了进行数据计算,中心位置建立传感器坐标系xyz,x轴指向所述的激光雷达2的检测中心方向,与水平方向成β夹角,y轴指向左侧,同时建立世界坐标系xyz,y轴与y轴重合,x轴指向正前方,z轴指向竖直向上。所述的激光雷达2输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},其中k=0,1,2...,为检测的序号,α
i
为所述的激光雷达2在竖直方向上的检测角度,i为竖直方向上的数据序号,i=0,1,2...n
‑
1,n为所述的激光雷达2的线数,j为水平方向上的数据序号,j=0,1,2...,θ为所述的激光雷达2在水平方向上的检测角度增量。优选的,所述的激光雷达4设置为velodyne vlp16激光雷达,n为16,α0至α
15
依次
‑
15
°
,1
°
,
‑
13
°
,3
°
,
‑
11
°
,5
°
,
‑9°
,7
°
,
‑7°
,9
°
,
‑5°
,11
°
,
‑3°
,13
°
,
‑1°
,15
°
,θ=0.1
°
,由于vlp16水平方向上检测范围是360
°
,j的取值范围只取120
°
,即j=0,1,2...1200。
[0022]
所述的处理器用于实现路况分析方法,所述的路况分析方法包括以下步骤:
[0023]
(1)每隔固定周期δt,所述的处理器读取所述的激光雷达2输出数据f
k
(i,j)={(d
kij
,α
i
,j
·
θ)},转换为传感器坐标系下的点[x
ijk
,y
ijk
,z
ijk
]
‑1=[d
ijk
·
cosα
i
·
sin(j
·
θ
‑
θ0),d
ijk
·
cosα
i
·
cos(j
·
θ
‑
θ0),d
ijk
·
sinα
i
],其中θ0为j=0的检测角度;采用坐标转换方法,将点[x
ijk
,y
ijk
,z
ijk
]
‑1转换为世界坐标系下的点
[0024]
所述的激光雷达2获取的是不同角度和方向上,物体反射点与所述的激光雷达2的距离,需要转换成传感器坐标系下的坐标,进一步转换为世界坐标系下的坐标,为后续数据处理提供便利。
[0025]
(2)在点[x
ijk
,y
ijk
,z
ijk
]
‑1组成的集合中,搜索障碍物,并提取障碍物信息:距离d,方位δ,高度h,宽度w,具体步骤如下:
[0026]
(2a)、搜索点[x
ijk
,y
ijk
,z
ijk
]
‑1在x轴正方向上的邻近点[x
mnk
,y
mnk
,z
mnk
]
‑1,即x
mnk
>x
ijk
,同时[(x
mnk
‑
x
ijk
)2 (y
mnk
‑
y
ijk
)2]
1/2
最小,其中m=0,1,2...n
‑
1,n=0,1,2...,计算δx
ijk
=x
mnk
‑
x
ijk
,δz
ijk
=z
mnk
‑
z
ijk
,以及梯度g
ijk
=δz
ijk
/δx
ijk
;
[0027]
因为用户的行走方向是朝向x轴的正方向,因此在进行特征计算的时候,选取了当前点[x
ijk
,y
ijk
,z
ijk
]
‑1与其在x轴正方向上的邻近点[x
mnk
,y
mnk
,z
mnk
]
‑1计算特征参数。
[0028]
(2b)、当δx
ijk
>t
x
,将点[x
ijk
,y
ijk
,δz
ijk
]
‑1存入数据链表l0,其中t
x
为凹陷区域x激增阈值;当g
ijk
>tg,将点[x
ijk
,y
ijk
,z
ijk
]
‑1存入数据链表l1,t
g
为凸起障碍物梯度阈值;
[0029]
如图2所示,遇到向下凹陷区域,比如向下的台阶,由于激光直线传播特性,导致凹陷区域边缘两侧的激光检测点,具有如下特征:第一,x坐标显著增加;第二,z坐标的绝对值增加。δz
ijk
与δx
ijk
成正比关系,因此采用δx
ijk
>t
x
作为凹陷区域判据;如图3所示,遇到凸起的障碍物,比如直立的墙面,所述的激光雷达2投射的激光都会打在垂直方向的立面上,因此具有如下特征:第一,x坐标不增加或者增加细微;第二,z坐标变化显著,区别于平
整地面的z坐标不变化的情况。因此采用梯度g
ijk
=δz
ijk
/δx
ijk
,将这种变化进行放大,作为凸起障碍物的判据。
[0030]
(2c)、遍历完所有的点以后,如果数据链表l0非空,则计算凹陷区域参数:距离d=minx(l0),方位δ=arctan(avergey(l0)/avergex(l0)),高度h=avergeδz(l0),宽度w=maxy(l0)
‑
miny(l0);
[0031]
如果数据链表l1非空,则计算凸起障碍物参数:距离d=minx(l1),方位δ=arctan(avergey(l1)/avergex(l1)),高度h=maxz(l1)
‑
minz(l1),宽度w=maxy(l1)
‑
miny(l1);
[0032]
其中minx,miny和minz分别为计算数据链表中的x坐标,y坐标和z坐标最小值的算式,maxy,maxz为计算数据链表中点的y坐标和z坐标最大值的算式,avergex,avergey和avergeδz为计算数据链表中的x坐标,y坐标和δz均值的算式。
[0033]
在高度h参数计算上,凹陷区域及凸起障碍物存在差异:凹陷区域的形态特征主要集中在凹陷区域的边缘,因此以边缘点的δz
ijk
作为凹陷区域的高度h参数;而凸起障碍物的形态特征分布在垂直立面上,因此以垂直立面上的检测点的z坐标分布范围作为凸起障碍物的高度h参数
[0034]
(3)如果发现障碍物,所述的处理器通过所述的振动器警示用户,并且通过所述的喇叭5播报障碍物信息。
[0035]
通过振动及声音提示和预警,可有效保障用户的出行安全。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。