1.本发明属于太赫兹准光单脉冲天线领域,具体涉及一种基于反射式相位修正镜的准光单脉冲天线。
背景技术:
2.单脉冲技术作为一种精密角度测量技术,理论上只需要分析一个回波脉冲就可以确定目标的位置信息,大大加快了提取目标位置信息的速度。对于太赫兹频段的准光单脉冲天线,直接从准光和差比较器端面上辐射的和波束存在副瓣电平较高的问题,这是由于从准光和差比较器端口辐射的波束距离相对于波长很大,因此,为了得到较好的和差辐射特性,必须通过改善其输出口径面的场分布来抑制副瓣电平。目前,采用一些光学元件如介质透镜天线、衍射透镜等可以实现改善和差比较器输出端面场的目的,从而得到所期望的方向图。这些光学元件虽然具有结构简单、体积小、加工成本低等优点,但是由于介质损耗的原因,存在损耗较大的问题,所以,寻求一种低损耗、高效率、易加工的技术方案尤为重要。
技术实现要素:
3.本发明提供了一种基于反射式相位修正镜的准光单脉冲天线,能够改善准光和差比较器输出端口的场分布、优化辐射特性,具有损耗低、效率高且易加工的优点。
4.为实现上述目的,本发明采用的技术方案如下:
5.一种基于反射式相位修正镜的准光单脉冲天线,包括沿轴向依次设置的和差比较器、第二相位修正镜、第一相位修正镜。
6.所述和差比较器为准光和差比较器,包括和输入端口、方位差输入端口、俯仰差输入端口、以及4个输出端口;当高斯波束从和输入端口进入,4个输出端口输出的4个波束幅值相同、相位相同;当高斯波束从俯仰差输入端口进入,4个输出端口输出的4个波束幅值相同,上面两个波束与下面两个波束相位相差180
°
;当高斯波束从方位差输入端口进入,4个输出端口输出的4个波束幅值相同,左侧两个波束与右侧两个波束相位相差180
°
。
7.所述第一相位修正镜为中心设置有圆孔输出端口的曲面反射镜,用于将和差比较器输出的4个波束反射汇聚至第二相位修正镜,并修正优化4个波束的相位使得到达第二相位修正镜的4个波束的相位满足和差效果。
8.所述第二相位修正镜为曲面反射镜,用于将4个波束反射至第一相位修正镜的圆孔输出端口处合成输出,同时二次修正4个波束的相位使到达圆孔输出端口的相位满足和差效果。
9.进一步地,所述第一相位修正镜、第二相位修正镜的镜面形状通过以下步骤获得:
10.s1:确定相位修正镜的初始场和目标场
11.定义相位修正镜的入射场为初始场目标场为观测平面s0处期望得到
的场分布。其中,为初始面s的位置矢量,为观测平面s0的位置矢量。
12.对于第一相位修正镜:所述第一相位修正镜的初始场为前级和差比较器的输出场到达第一相位修正镜的初始面s的场。
13.根据已知的前级和差比较器的输出场分布以及观测平面s0处期望得到的目标场分布,确定第一相位修正镜的初始面s的镜面形状及位置,以实现将前级和差比较器输出的4个波束反射汇聚至观测平面s0。
14.进一步地,所述初始面s的形状由四个尺寸相同的矩形平面镜拼接组成。
15.对于第二相位修正镜:所述第二相位修正镜的初始场为第一相位修正镜修正后的观测场;所述第二相位修正镜所在平面为第一相位修正镜的观测平面s0;所述第二相位修正镜的观测平面s0为圆孔输出端口所在平面。
16.进一步地,所述第二相位修正镜的初始面s为矩形平面镜。s2:由公式(1)计算初始场经过初始面s反射后的反射场
[0017][0018]
其中是相位修正镜的镜面扰动量,k为传播常数,γ为初始场入射方向与镜面法向的夹角。
[0019]
s3:由标量绕射积分公式计算反射场传输到观测平面s0的观测场分布
[0020][0021]
其中g为自由空间的格林函数,其表达式为:
[0022]
s4:定义观测场分布与目标场的差别量为:
[0023][0024]
s5:将初始面s进行矩形网格离散化,在x方向上的网格边长为δx、网格数量为v,在y方向的的网格边长为δy、网格数量为w;因此位置矢量写成三坐标的形式:其中v为x方向的网格序号,w为y方向的网格序号;所以相位修正镜的镜面扰动量写为:其中代表镜面扰动矢量,δ代表dirac函数,a
vw
代表点处的扰动幅度,表示x方向第v个、y方向第w个网格的位置矢量。
[0025]
s6:将观测平面s0进行矩形网格离散化,在x0方向上的网格边长为δx0、网格数量为v,在y0方向的的网格边长为δy0、网格数量w;因此位置矢量写成三坐标的形式:其中v为x0方向的网格序号,w为y0方向的网格序号。
[0026]
将式(3)进行离散化:
[0027][0028]
其中为离散化的观测场分布。
[0029]
s7:计算目标场与观测场差别量的最小值,即寻找差别量的极值,根据连续函数的性质可知该函数的极值点可以表现为其一阶导数为零,令得到迭代公式(5):
[0030][0031]
其中k0为自由空间波数,上标“*”代表取复共轭,i为迭代的次数。经过公式(5)的反复迭代求得相位修正镜的镜面上任意一点的扰动量,从而得到最优化的相位修正镜镜面形状。
[0032]
s8:根据最终的输出波束的半径大小,在s7得到的第一相位修正镜中心设置一个圆孔输出端口;以s7得到的第二相位修正镜的中心为圆心,截取圆形镜面结构作为第二相位修正镜,使得第二相位修正镜满足既不遮挡前级和差比较器的输出波束,又能实现修正波束相位的要求。
[0033]
在实际应用中,由于准光和差比较器输出端口辐射的四个波束间的中心距离相对于波长很大,同时和差比较器出射波束的半径较大,导致准光和差比较器的输出场分布相较于理想输出场存在一定偏差。因此本发明通过设置目标场来获得第一相位修正镜的镜面形状,以此实现缩小波束半径和修正相位,使得波束到达第二相位修正镜时,能量泄露很少且基本满足相位要求;本发明的第二相位修正镜主要用于改变波束的辐射方向,同时进一步对四个波束进行相位修正,保证在圆孔输出端口处完成对最终目标场的实现。相比于主流的采用介质透镜或者衍射透镜的方法,本发明在传输过程均采用反射的方式,具有传输损耗小、传输效率高的优势。
附图说明
[0034]
图1为相位修正镜原理示意图。
[0035]
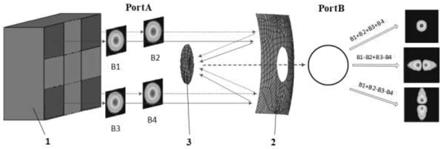
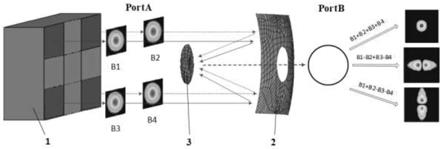
图2为基于相位修正镜的太赫兹准光单脉冲天线辐射特性的结构示意图。
[0036]
图3为初始方位面上的和差方向图。
[0037]
图4为初始俯仰面上的和差方向图。
[0038]
图5为修正后的方位面上的和差方向图。
[0039]
图6为修正后的俯仰面上的和差方向图。
[0040]
附图标号说明:1准光和差比较器,2第二相位修正镜,3第一相位修正镜。
具体实施方式
[0041]
下面结合图来阐述本发明的具体实施方式。
[0042]
图2是本实施例的结构示意图,如图2,该结构包括:包括沿轴向依次设置的准光和差比较器、第二相位修正镜、第一相位修正镜。
[0043]
第一相位修正镜为中心设置有圆孔输出端口的曲面反射镜,用于将和差比较器输出的4个波束反射汇聚至第二相位修正镜,并修正优化4个波束的相位使得到达第二相位修正镜的4个波束的相位满足和差效果。
[0044]
第二相位修正镜为曲面反射镜,用于将4个波束反射至第一相位修正镜的圆孔输出端口处合成输出,同时二次修正4个波束的相位使到达圆孔输出端口的相位满足和差效果。
[0045]
前级准光和差比较器提供的高斯波束工作频率为340ghz,提供的场分布分别是和波束场分布、方位差波束场分布和俯仰差波束场分布。其中和波束场分布表现为四个等幅同向的高斯波束,方位差波束场分布表现为左边两个波束的幅值与右边两个波束幅值相等,但其相位相差180
°
,俯仰差波束场分布表现为上面两个波束的幅值与下面两个波束幅值相等,但其相位相差180
°
。
[0046]
第一相位修正镜的镜面形状计算方法为:已知准光和差比较器输出端口的输出场,其波束半径约为9.4mm,其四个波束中心距离为50mm,中心坐标分别为(25,25,0)、(25,
‑
25,0)、(
‑
25,25,0)、(
‑
25,25,0),单位mm。图3和图4为该准光和差比较器方位面和俯仰面的远场方向图。
[0047]
第一相位修正镜期望的目标场为束腰半径6mm的高斯波束,因此设置第一相位修正镜的初始面s为4个50mm*50mm的矩形平面镜组成,其中心坐标为(0,0,102),单位mm,以实现将和差比较器输出的4个波束反射汇聚至观测平面。
[0048]
根据发明内容记载的步骤,通过迭代公式可计算出第一相位修正镜的结构,完成对四路波束的反射汇聚并修正相位;然后根据最终的输出波束半径大小,将第一相位修正镜的中心挖出一个半径为18mm的圆形通孔,保证修正后的波束能够通过该圆孔辐射和差波束。
[0049]
同理计算第二相位修正镜的镜面形状:将第一相位修正镜修正后的观测场作为第二相位修正镜的初始场,设置第二相位修正镜的目标场为束腰半径为4mm的高斯波束,设置第二相位修正镜的初始面s为20mm*20mm的矩形平面结构,其中心坐标为(0,0,0),单位mm。最后为了防止第二相位修正镜对入射波束的遮挡,将20mm*20mm的矩形结构截取成半径20mm的圆形结构。
[0050]
为了验证结果的准确性,将得到的相位修正镜导入仿真软件中,并在仿真软件中建立整个仿真模型。图5是方位差方向的和差远场方向图,图6是俯仰差方向的和差远场方向图,由图可知,其和波束副瓣电平均在
‑
15db以下。从传输效率来看,该发明传输效率约为85%,损耗较低。
[0051]
结果表明,本发明提供的一种基于反射式相位修正镜的准光单脉冲天线,其具有损耗低、效率高且易加工的优点。为改善准光和差比较器输出端口场、优化其辐射特性提供了一种新的方法。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。